
Fターム[3C007BS11]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937) | 5自由度のもの (13)
Fターム[3C007BS11]に分類される特許
1 - 13 / 13
塗装システム
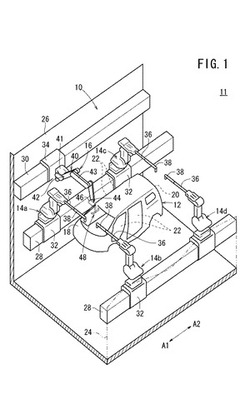
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
汎用ロボット移動教示装置

【課題】関節数等構成・形状の異なる様々なロボットに対して広汎にハンド・関節の移動後の座標・姿勢を教示することができる装置を提供すること
【解決手段】可動部を有するチューブが多数連なるチューブ群と隣接するチューブ間の角度を検出するフレキシブルセンサチューブと情報教示部より成り、1又は複数の特定のチューブについての変形後の座標及び/又は姿勢を算出し、逆運動学に基づいて教示対象ロボットの対応する1又は複数の特定の部分及び/又は中間部分についての移動後の座標及び/又は姿勢を教示する汎用ロボット教示装置を提供する。
(もっと読む)
ロボット装置及びその操作方法
【課題】操作性を向上させつつ誤操作を確実に防止できるロボット装置及びその操作方法を提供すること。
【解決手段】ロボット装置10は、操作情報を入力するための操作部25と、操作部25の着脱が可能な複数の操作着脱部12a、24a、24bと、を備えている。また、ロボット装置10は、台車部1と、台車部1の車輪を駆動する車輪駆動部と、台車部1に連結されたアーム部2と、アーム部2を駆動するアーム駆動部と、操作部25から操作着脱部12a、24a、24bを介して入力される操作情報に基づいて、車輪駆動部及びアーム駆動部を制御する制御部17と、アーム部2に取付けられ、人を保持する保持具3と、を更に備えていてもよい。
(もっと読む)
ロボットアームの冷却機構、ロボットアームの冷却装置、及びロボットアームの冷却方法
【課題】ロボットアームの重量を増やすことなく、ロボットアームの発熱体搭載部の発熱
を効果的に放熱できるロボットアームの冷却機構、冷却装置、及び冷却方法を提供するこ
と。
【解決手段】ロボットアーム1の発熱体搭載部に、ロボットアーム1の移動によって気流
を発生させると共に、気流に放熱する放熱手段(冷却機構19)を設けた。また、放熱手
段は、発熱体搭載部の外周部に複数の孔22aが設けられた1枚又は複数枚の放熱板22
を設けた。
(もっと読む)
スカラロボット
【課題】アーム部の位置制御が容易でロボット先端部の配置位置と目標位置とのズレの少
ないスカラロボットを提供する。
【解決手段】スカラロボット1は、ベース部2、アーム部3、テーブル部4から構成され
、ベース部2は、床面等に設置されたベース10を有する。アーム部3は、ベース10に
対して回転可能に第1のアーム11を、第1のアーム11に回動可能に第2のアーム12
を、第2のアーム12に回動可能に先端部13Bにツールの取付可能な第3のアーム13
を備えている。テーブル部4は、先端に回動板22を備えた駆動軸21がベース10の正
面10Bから水平方向に突出されている。回動板22は、その中央部に突出した第5モー
タの駆動軸に回転可能に作業テーブル24の中央部を連結固定している。作業テーブル2
4は、ワークを保持する一対のチャック26を備えている。従って、ワークは作業テーブ
ル24の回転により回動される。
(もっと読む)
スカラロボット
【課題】アーム部の位置制御が容易でロボット先端部の配置位置と目標位置とのズレの少
ないスカラロボットを提供する。
【解決手段】スカラロボット1は、ベース部2、アーム部3、搬送部4から構成され、ベ
ース部2は、床面等に設置されたベース10を有する。アーム部3は、ベース10に対し
て回転可能に第1のアーム11を、第1のアーム11に回動可能に第2のアーム12を、
第2のアーム12に回動可能に先端部13Bにツールの取付可能な第3のアーム13を備
えている。搬送部4は、支持腕21が固定されて、アーム部3の回動方向とは垂直の方向
に回動する外筒部10Cを有する。支持腕21は、支持腕21に対して回動可能に駆動軸
22が突出形成され、駆動軸22はワークを保持するワーク保持装置23を備えている。
従って、搬送部4は、ワーク保持装置23に保持したワークを搬送面(XY平面)の所定
の目標位置に配置できる。
(もっと読む)
マニピュレータおよびそれを複数備えたパワーアシスト装置
【課題】マニピュレータおよびそれを複数備えたパワーアシスト装置において、操作性の向上を図る。
【解決手段】パワーアシストアーム1は、動作部としての直動関節5と、回転関節6と、ハンド部8とを備えている。また、パワーアシストアーム1は、各動作部を操作する第1操作部11および第2操作部12と、直動関節5を駆動する直動関節駆動装置と、回転関節6を駆動する回転関節駆動装置と、ハンド部8を駆動するハンド部駆動装置とを備えている。第1操作部11はハンド部8から離れた位置にあり、第2操作部12はハンド部8に近接した位置に設置されている。パワーアシストアーム1は、直動関節5、回転関節6およびハンド部8の力覚を第1操作部11に提示する直動関節力覚提示装置、回転関節力覚提示装置およびハンド部力覚提示装置を備えている。
(もっと読む)
日常生活支援マニピュレータ装置
【課題】日常生活で、自らの腕のように操作できる小型、軽量、安全な日常生活支援マニピュレータ装置を実現する。
【解決手段】互いに多関節状に接続される複数のアーム構成要素は、平行リンクを構成する駆動リンク6、12および従動リンク5、11を備えたアーム構成要素を含み、駆動リンク17を備え従動リンクを備えていないアーム構成要素を含み、駆動リンク6、12、17および従動リンク5、11は、それぞれ両端が、支持体3、9、15、20に回転可能に取り付けられており、駆動リンク6、12、17は、その一端において回転軸を介して支持体3、9、15に付設されたモータにより駆動され、従動リンク5、11や駆動リンク17には、支持体9、15、20との間でバネ8、14、19が装着されていることを特徴とする日常生活支援マニピュレータ装置29を提供する。
(もっと読む)
日常生活支援ロボットアーム装置
【課題】日常生活で、自らの腕のように操作できる小型、軽量、安全な日常生活支援ロボットアーム装置を実現する。
【解決手段】互いに多関節状に接続される複数のアーム構成要素は、平行リンクを構成する駆動リンク6、12および従動リンク5、11を備えたアーム構成要素を含み、駆動リンク17を備え従動リンクを備えていないアーム構成要素を含み、駆動リンク6、12、17および従動リンク5、11は、それぞれ両端が、支持体3、9、15、20のいづれかに回転可能に取り付けられており、駆動リンク6、12、17は、その一端において回転軸を介していづれかの支持体3、9、15に付設されたモータにより駆動され、従動リンク5、11や駆動リンク17には、いづれかの支持体9、15、20との間でバネ8、14、19とダンパー26、28、30が装着されていることを特徴とする日常生活支援ロボットアーム装置35を提供する。
(もっと読む)
繊維ケーブルを収納する装置及び方法
本発明は走行可能な収納装置(4)を用いてキヤンクリール(1)の複数のキヤン(3.1,3.2)に繊維ケーブル(6)を収納するための装置と方法とに関する。収納装置は可動に保持された搬送手段(5)を有し、該搬送手段(5)は複数の収納位置へ案内可能である。この場合、収納装置の各収納位置からキヤンクリールのキヤンの少なくとも1つが前記搬送手段によって充填可能である。キヤンクリールの複数のキヤンの迅速でかつできるだけフレキシブルな充填を可能にするためには、収納装置は本発明によれば多軸のロボットアーム(8)を有するロボット(7)を備えている。該ロボット(7)はそのロボットアームの自由端部に搬送手段(5)を保持している。この結果、搬送手段(5)は位置決めのためにもキヤンを充填する運動のためにも多軸のロボットアームによって案内されることができる。  (もっと読む)
(もっと読む)
リング搬送用ハンドとそれを用いた搬送装置
【課題】 リングのセンタリングをリングの把持と同時に高精度に行うことができるリング搬送用ハンドとそれを用いた搬送装置を提供する。
【解決手段】 リング状の被搬送物の内側もしくは外側に挿入される1個の円筒形の固定爪と、同じくリング状の被搬送物の内側もしくは外側に挿入される2個の円筒形の可動爪と、2個の円筒形の可動爪を同時に駆動するエアシリンダとを備えたリング搬送用ハンドにおいて、これら3個の円筒形の爪が3角形状に配置され、2個の円筒形可動爪は、その中心を結ぶ線に直角で、円筒形固定爪の中心を通る線と平行に移動する構成とする。これら3個の円筒形の爪はリングの把持時にはリングを把持し、かつ、3点でリングと接触する。
(もっと読む)
ロボット制御装置およびその制御方法
【課題】 高い計算能力を要せず簡単な計算で精度よく、姿勢に応じた最大加速度を求めて、低コストにロボット動作の高速化をはかる。
【解決手段】 ロボットアーム5の現在位置と目標位置から姿勢算出部7で各位置での姿勢を求め、その姿勢情報から、許容最大加速度算出部8において、アームの各回転軸廻りの慣性項およびアームの加速方向を加味した重力項を求め、これらに所定の係数を乗算して和算し、さらにさらにこれとロボットアーム5の最大負荷姿勢時の許容最大加速度とを乗算した値を、最大負荷姿勢時の許容最大加速度に付加して、現在位置と目標位置での許容最大加速度を算出する。
(もっと読む)
レーザ加工用ロボット及びロボットシステム
【課題】 レーザ加工作業中に光ファイバに生じ得る絡みや撓みの問題を解消でき、しかもロボットの外形寸法の増加を効果的に抑制できるレーザ加工用ロボットを提供する。
【解決手段】 マニピュレータ14の腕部28は、第1制御軸44に関して固定配置される第1部材48と、第1制御軸44に関して回転可能に第1部材48に支持され、手首部26を有する第2部材50とを備え、配線通路52が第1及び第2部材の内部に連続して形成される。第1部材には光ファイバ導入口54が設けられ、第2部材の手首部には光ファイバ導出口56が設けられる。レーザ加工ツール18は、第2制御軸46に関して旋回可能な装着部60と、装着部に内設され、光ファイバ22から出射されたレーザ光を反射してノズル部64のレーザ光通路62に導く反射部66とを備え、光ファイバの出力端面22aが、光ファイバ導出口56と反射部66との間に位置決めされる。
(もっと読む)
1 - 13 / 13
[ Back to top ]