
Fターム[3C007CV07]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が回動するもの (446) | 水平面内のみ回動 (204)
Fターム[3C007CV07]に分類される特許
201 - 204 / 204
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 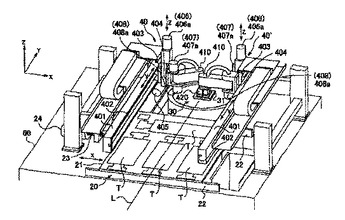 (もっと読む)
(もっと読む)
移載機

【課題】リンク機構のみで、大きなストロークを確保して大型のガラス板でも、ストッカーなどと干渉することなく、高速で移載できるようにした移載機を提供すること。
【解決手段】先端に搬器4を取り付けた2本一対の搬器支持リンク2と、先端側に搬器支持リンク2を枢着したX字形の主リンク1と、主リンク1の基端側と枢着し、基端側の駆動軸Pにて揺動可能とした2本一対の揺動リンク3とよりなり、揺動リンク3の揺動にて前記リンク機構の屈伸作用で、姿勢を制御しつつ、直線の移載方向の運行軌跡に沿って搬器4を移動するように構成する。
(もっと読む)
アーム制御方法およびアーム制御装置

【課題】 アームにワーク収納作業などの所望の動作を行わせる際に合理的な動作計画を設定して全体としての機構の単純化および作業の効率化を図ることができるアーム制御方法およびアーム制御装置を提供する。
【解決手段】 前後軸および回転軸を有するアーム2を制御するものであって、前後軸の動作計画を始めに設定し、該動作計画が設定された前後軸の動作パラメータθに基づいて、アーム2先端が所望の動作を行うよう回転軸の動作計画を設定する手順を有するものである。
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
201 - 204 / 204
[ Back to top ]