
Fターム[3C007CV07]の内容
マニピュレータ、ロボット (46,145) | 第1の腕の動作形態 (562) | 第1の腕が回動するもの (446) | 水平面内のみ回動 (204)
Fターム[3C007CV07]に分類される特許
41 - 60 / 204
基板搬送装置およびそれを備えた基板処理装置
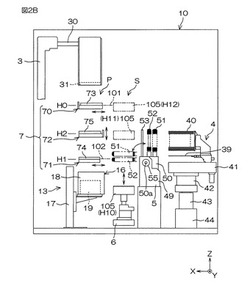
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切換えに要する時間を短縮することができ、構成も簡略化できる基板搬送装置およびそれを用いた基板処理装置を提供する。
【解決手段】搬出入機構4は、複数枚の基板Wを積層状態で一括して保持するバッチハンド40と、このバッチハンド40を進退させるバッチハンド進退機構と、1枚の基板Wを保持する枚葉ハンド39と、この枚葉ハンド39を進退させる枚葉ハンド進退機構と、バッチハンド進退機構および枚葉ハンド進退機構を保持する保持ベース41と、保持ベース41を上下動させる昇降ブロック43と、前記保持ベース41を鉛直方向に沿う旋回ブロック42とを含む。
(もっと読む)
水平多関節型ロボット

【課題】応答性能や位置決め精度を維持しつつ、その可動範囲を広く確保することのできる水平多関節型ロボットを提供する。
【解決手段】スカラロボットには、基台11に第1のアーム13の基端部を回動可能に支持する連結軸12が設けられ、その軸心C1を中心に第1のモータM1により正逆回転される。第1のアーム13の先端部には、第2のアーム15の基端部を支持させる支持軸14が連結されその軸心C2を中心に第2のモータM2により正逆回転される。第2のアーム15には先端部に軸心C3を有する主軸16が設けられている。第1のアーム13は軸心C1と軸心C2とを結ぶ中心線に対して偏心しており、左側面に右側に凹むかたちの凹部13dが形成され、すなわち右側に湾曲した形状に形成されている。軸心C2と軸心C3との距離は、軸心C1と軸心C2との距離よりも短いことから主軸16が凹部13dに入り込ませるかたちに配置させることができる。
(もっと読む)
産業用ロボット
【課題】大きな搬送対象物や高価な搬送対象物の搬送に適した産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、上下駆動機構を停止させるための2個のブレーキ機構24を備え、制御部80は、2個のブレーキ機構24を制御するブレーキ制御部84を備えている。ブレーキ制御部84は、2個のブレーキ機構24を段階的に作動させる。
(もっと読む)
ロボットのアーム可動範囲変更制御装置
【課題】ストッパ位置を変更できるものにおいて、ソフト制御上の可動制御範囲に対して物理ストッパの可動範囲を間違えて設定してしまうことを抑制できるようにする。
【解決手段】制御部9は、図示しないスイッチからアームの可動制御範囲区域についての変更要求があると、複数のアーム可動制御範囲区域の選択肢を表示部12に表示し、図示しないタッチパネルスイッチにより1つの選択肢を選択決定する旨の入力がなされたことを認識すると、前記可動制御範囲区域を当該選択決定された選択肢の可動制御範囲区域に設定し、物理被ストッパが、該設定された可動制御範囲区域により特定される物理ストッパのストッパ配置部の近くであって且つ前記設定された可動制御範囲区域内の位置に至るように、前記アームを移動させて停止させる。
(もっと読む)
産業用ロボット
【課題】大型化する搬送対象物を搬送する場合であっても、小型化が可能で、かつ、コストを低減することが可能な産業用ロボットを提供すること。
【解決手段】搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材とを備えるとともに、支持部材を上下動させる上下駆動機構、および支持部材を水平方向に移動させるための水平駆動機構、および上下方向を軸方向とする所定の中心軸を中心に前記支持部材を回転させるための回転駆動機構を備え、前記上下駆動機構、前記水平駆動機構、前記回転駆動機構は、それぞれ複数の駆動用モータを備える。例えば上下駆動機構においては、上下駆動用モータ20、プーリ28,29とベルト30、上下ブレーキ機構24、減速機21、減速機の出力軸に設けられたピニオン22をそれぞれ2組有し、1本のラックに2個のピニオン22が噛み合い駆動する。
(もっと読む)
ダイレクトドライブモータ及びスカラーロボット
【課題】磁極の固定に起因する雰囲気汚染を回避しながらも、ロボットに必要な剛性を確保でき且つ信頼性の高い,大気外の雰囲気中で用いられるダイレクトドライブモータ及びスカラーロボットを提供する。
【解決手段】直列的に連結された3段のブラシレスモータBM1において、ステータ29と、大気軸受装置33と、大気側回転子30と、角度検出器35,36と、モータ回転子21と、真空軸受装置19のうち少なくとも2つを、モータ軸線方向において互いに少なくとも一部が重合する位置に配置しているので、コンパクトな構成ながら、高い剛性を確保することができる。
(もっと読む)
多関節ロボット
【課題】コラムに備えられた移動機構の支持部に作用するモーメント荷重を小さくしながら、多関節ロボットが占有するスペースを小さくする多関節ロボットを提供する。
【解決手段】ハンド部8と、前記ハンド部8と連結され少なくとも2つ以上の回転関節3、4、5を備え前記ハンド部8が1方向に移動するように旋回しかつ上下方向に並進移動する水平多関節の上アーム21と、上アーム21に対向配置され上アーム21と同様な構造を有する下アーム22と、各アームを上下に移動させる二つの移動機構11と、移動機構と各アームを連結する二つの支持部材10とを有する。上アーム21の関節部4は、ワーク9の取り出し位置から縮み位置に移動するときコラム12に近づくように旋回する。また、下アーム22の関節部4は、ワーク9の取り出し位置から縮み位置に移動するときコラム12から遠ざかるように旋回する。
(もっと読む)
フロッグレッグアームロボット
【課題】専用の冶具を用いることなく、フロッグレッグアームロボットの正確な組立てを可能とする。
【解決手段】本体部1に対して接続されると共に基準平面に沿って対称に揺動される一対のアーム部2と、アーム部2を揺動する駆動部5とを備えるフロッグレッグアームロボットであって、上記アーム部2に、フロッグレッグアームロボットの組立て時において上記アーム部2を上記本体部1に対する基準姿勢とするためのマーク100が形成されている。
(もっと読む)
多関節ロボット
【課題】本発明はメンテナンスが容易な多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部8と、前記ハンド部8と連結され、少なくとも2つ以上の回転関節3、4、5を備え、前記ハンド部8を1方向に移動するように伸縮し、上下方向に対向するように配置された多関節アーム21、22と、上下に移動するようにコラム12に取り付けられた上下方向に移動する移動機構11と前記多関節アーム21、22とを連結する支持部材10と、前記コラム12の下端部に連結され、前記コラム12に取り付けられた前記多関節アーム21、22を旋回する台座13とからなる多関節ロボットにおいて、前記台座13を旋回させる減速機37の出力軸39の固定面が前記台座13を支持する前記軸受42の厚みの略中心に位置するものである。
(もっと読む)
ワーク搬送用ロボット
【課題】アーム機構部の旋回及び伸縮を可能とする各モータの配線ケーブルに折れ曲がりやねじれなどの変形が生じるのを防止する。
【解決手段】第1及び第2のアームとハンドとを有するアーム機構部100と、該アーム機構部を昇降させるための昇降機構部200と、アーム機構部を伸縮動作させるための伸縮機構部300と、アーム機構部を旋回動作させるための旋回機構部400と、固定フレーム500とを有するワーク搬送用ロボットであって、昇降機構部200は、固定フレーム500に固定された昇降用モータ220を有し、伸縮機構部200は、固定フレーム500に固定された伸縮用モータ310と、該伸縮用モータの駆動力をアーム機構部100に伝達する第1スプライン軸350とを有し、旋回機構部400は、固定フレーム500に固定された旋回用モータ410と、該旋回用モータの駆動力をアーム機構部100に伝達する第2スプライン軸430とを有する。
(もっと読む)
ロボット及び生産システム
【課題】ロボットによる作業を行う生産システムにあって、全体をコンパクトに配置しながら、比較的低コストで構築することを可能とし、しかも人に対する安全性を高める。
【解決手段】ロボット12の直動軸を構成する直線移動レール13の片側に、ロボット12がワークWに対する作業を行う複数個の作業ステーション14〜16を配置して生産システム11を構築する。ロボット12を、直線移動レール13の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21の基端部を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸J2を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
ロボット及び生産システム
【課題】ワーク搬送路に沿って並ぶ複数の工程エリアに夫々設けられたロボットにより、ワークに対して複数の作業工程を順に実行するものにあって、全体の小型化を図る。
【解決手段】ワークWが搬送されるワーク搬送路13に沿って、ワークWに対する作業を順に行うロボット12を備える複数個の作業ステーション14〜17を配置して生産システム11を構築する。ロボット12を、直線移動レール18の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
真空内使用のためのロボット
ロボットは、リソグラフィ装置の真空チャンバ内で対象物を位置決めする。ロボットの第1コンポーネントは、並進軸に沿って対象物を位置決めするために真空チャンバ内に配置される。シャフトは、シャフトの対称軸が並進軸に対して垂直になるように第1コンポーネントを支持し、第2コンポーネントは、対称軸の周りでシャフトを回転させ、かつシャフトを対称軸に対して平行方向に移動させる。第2コンポーネントは、シャフトの外周面に沿ってガスを導入するように構成されたガスベアリングと、第2コンポーネントガスベアリングによって導入されたガスを排気するように構成された排出シールとを含む。ロボットは、炭化水素分子のガス放出を約0〜200a.m.u.の範囲に実質的に減少または除去し、よってロボットは極端紫外線(EUV)フォトリソグラフィ用途での使用に適する。 (もっと読む)
クランプ装置及び移送用ロボット
【課題】バラツキが大きくてもクランプすることができるクランプ装置、および台車を提供すること。
【解決手段】クランプ装置10は、直動するアクチュエータと、アクチュエータの直動方向と直交する方向に伸びるリンク2と、リンク2の両端に回転可動に取り付けられ、被クランプ部8をクランプするツメ部3aを有するクランプ部3とを有する。アクチュエータが直動すると共にクランプ部3が内側から外側に開くように回転して被クランプ部8をクランプする。
(もっと読む)
搬送ロボット
【課題】旋回動作を伴わずにワークカセットとワークステージとの間におけるワークの搬送を効率的に行うことが可能な搬送ロボットを提供する。
【解決手段】搬送ロボット10は、本体12、第1のアーム18、第2のアーム16を備える。第1のアーム18は、ウェハカセットと本体12の上方位置との間で往復移動可能に構成される。第1のアーム18は、ウェハを把持するように構成された複数の把持部を有する第1のハンド182を備える。第2のアーム16は、本体12の上方位置とウェハステージとの間で往復移動可能に構成される。第2のアーム16は、第1のハンド182とは異なる角度からウェハを把持するように構成された複数の把持部を有する第2のハンド162を備える。第1のハンド182における把持部と第2のハンド162における把持部とは、互いに同じ高さに配置されるように構成される。
(もっと読む)
マニピュレータ
【課題】軸に直交する方向の微小な並進変位と軸まわりの回転変位を与えるコンパクトで単純な機構のマニピュレータを提供する。
【解決手段】作業を行うアーム部2と、アーム部2の回転角を制御する回転角制御部3と、アーム部2の変位を制御する変位制御部4と、を備えたマニピュレータ1において、回転角制御部3は、回転駆動力を付与する回転角付与手段31を有し、アーム部2は、回転角付与手段31に接続され、回転可能であると共に、屈曲可能な屈曲軸部21と、屈曲軸部21に接続され、屈曲軸部21が屈曲することにより移動する作用軸22と、作用軸22の先端に設置され、各種作業を行う作業部23と、を有し、変位制御部4は、作用軸22に力を付与する変位付与手段41と、変位付与手段41の駆動力を伝達し、作用軸22に常に当接する出力部材42と、を有することを特徴する。
(もっと読む)
ロボットシミュレータ及びロボットシミュレータの制御方法
【課題】複数の制御系列を有するロボットにつき、各制御系列の動作可能領域が明確に把握できるように画像を表示するロボットシミュレータを提供する。
【解決手段】ロボット51の各制御系列,右手系,左手系につき設定される動作可能エリアの一部が重複する場合、その動作可能エリア内に障害物56が位置すると、パソコンは、障害物56に応じて再設定した各手系の動作可能エリアの画像をディスプレイに色分けして描画表示する。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】アームが、駆動部1からの回転動作を伝達する伝達機構と、伝達機構を収容するアームケース201と、伝達機構を覆うようにアームケース201の上面に装着されるアームカバー214と、によって構成された水平多関節ロボットにおいて、アームカバー214が、アームケース201が延在する方向に複数分割された複数のアームカバーからなるよう構成し、さらに複数のアームカバー214が互いに折り重なる部分を形成した。
(もっと読む)
自動教示システム
【課題】簡易な構成により搬送ロボットに対して搬送対象ポイントまでのハンドの移動経路を自動的に教示することが可能な自動教示システムを提供する。
【解決手段】 自動教示システムは、第1の光学センサ72、第2の光学センサ74、記録手段および算出手段を実現するCPU50を備える。第1の光学センサ72および第2の光学センサ74は、搬送対象ポイントに対する相対位置が予め定められるように配置される。第1の光学センサ72は、ハンド20の水平方向の一端部を検出可能に構成される。第2の光学センサ74は、ハンド20の水平方向の他端部を検出可能に構成される。CPU50は、第1の光学センサ72および第2の光学センサ74によってハンド20の端部が検出された時におけるロボット座標系における座標値を記録するとともに、その座標値に基づいてロボット座標系における搬送対象ポイントの座標値を算出する。
(もっと読む)
ロボットの制御装置及びロボットの制御方法
【課題】生産サイクルタイムのロスをより確実に低減できるロボットの制御装置を提供する。
【解決手段】制御装置は、所定位置に配置されたパレット56について、ロボット51のアーム54が右手系,左手系の各制御系列により動作可能となる領域を計算し、パレット56に対するワーク供給又は取出し位置Pwを基準に初期作業位置を決定すると、その初期作業位置からロボット51が順次作業を進める位置をパレット56内で決定する。そして、アーム54の現在位置Pl(n)に隣接する作業位置が同じ制御系列で作業可能であればその位置を優先して次の作業位置とし、同じ制御系列では作業不可であればそれ以外に継続して作業可能な位置があれば当該位置での作業を同じ制御系列で行い、前記位置がなければ異なる制御系列で作業可能な位置を次の作業位置とする。
(もっと読む)
41 - 60 / 204
[ Back to top ]