
Fターム[3C007CY08]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | エネルギー供給 (611) | ケーブルを本体から離隔支持するもの (44)
Fターム[3C007CY08]に分類される特許
1 - 20 / 44
水平多関節ロボット及び水平多関節ロボットの制御方法
【課題】制振制御に用いられる角速度センサーの数を低減するとともに該角速度センサーに接続される電気配線に要求される耐久性を低くした水平多関節ロボット及び水平多関節ロボットの制御方法を提供する。
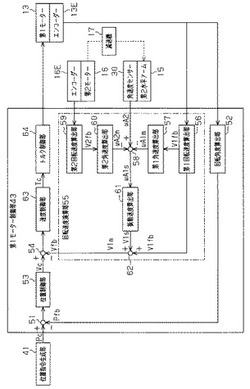
【解決手段】ロボットは、基台に連結される第1水平アームと、第1水平アームを介して前記基台に連結される第2水平アーム15と、各アームを回転させる第1及び第2モーター13,16と、各モーターの回転角度及び回転速度を算出するための第1及び第2エンコーダー13E,16Eとを有している。第1モーター制御部43は、角速度センサー30が検出したセンサー角速度ωA2から第1及び第2エンコーダー13E,16Eに基づく第1及び第2角速度ωA1m,ωA2mを減算し、演算結果である振動角速度ωA1sに基づく振動速度V1sと第1回転速度V1fbとの加算した速度計測値が速度指令Vcとなるように第1モーター13を制御する。
(もっと読む)
水平多関節ロボット

【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
ケーブル支持装置
【課題】ケーブルのたるみを大きくすることなく且つ保持部のストロークを長大化することなく、ロボット手首の自由度に十分に追従させることができるケーブル支持装置を提供する。
【解決手段】ケーブル11を保持する保持部52と、第2アーム24の長手方向に沿って移動自在な直動スライダ70を有する直動機構54と、第2アーム24の周方向に沿って回転自在な回動スライダ92、93を有する回動機構56とを備える。直動機構54及び回動機構56により、保持部52が第2アーム24の長手方向及び周方向に変位自在となっている。
(もっと読む)
ロボット
【課題】線条体の寿命を延ばすことが可能なロボットを提供する。
【解決手段】ベース12と、ベース12に旋回可能に設けられた旋回部13と、旋回部13に基端部が回転可能に支持され、前後方向に揺動する下部アーム15と、下部アーム15の長手方向に沿って、下部アーム15の側面に並んでそれぞれ配線された第1及び第2の線条体31、32を下部アーム15の長手方向に移動可能に支持する案内部41、案内部41の下部アーム15の長手方向の両側にそれぞれ設けられ、第1及び第2の線条体31、32が移動することより生じる第1及び第2の線条体31、32のロボット10の幅方向の変形を抑制する2つの押さえ部材42a、42b及び下部アーム15の基端部側の側面及び先端部側の側面をそれぞれ覆い、第1及び第2の線条体31、32を保護する2つの保護部材44a、44bを有する線条体支持機構20とを備える。
(もっと読む)
スカラロボット
【課題】アームの上下のデッドスペースを低減したスカラロボットを得ること。
【解決手段】ベース10と、第1関節軸を介して水平面内で回動可能にベース10に連結された第1アーム1と、第2関節軸を介して水平面内で回動可能に第1アーム1に連結された第2アーム2と、第2アーム2の先端部に上下動するように設置された先端軸4とを備えたスカラロボットであって、ケーブル15を収容してベース10と第1アーム1との間に架け渡された第1ケーブルダクト11及びケーブル15を収容して第1アーム1と第2アーム2との間に架け渡された第2ケーブルダクト12を備え、第1、第2ケーブルダクト11、12の一端は第1、第2関節軸上に位置しており、第1及び第2ケーブルダクト11、12は、上下方向に関して先端軸4の可動域上下動の範囲内に収まるように設置された。
(もっと読む)
フレキシブルガイド及びフレキシブルガイドを有する産業用ロボットのケーブル支持装置
【課題】周辺機器との干渉が少なく、ケーブルやホースの伸び曲げ挙動を考慮する必要のない一定形状を維持可能な構造が簡単で取扱易いフレキシブルガイド及びそれを用いた産業用ロボットのケーブル支持装置を提供。
【解決手段】筒状のフレキシブル部材20と、フレキシブル部材の両端に設けられた固定部7、8と、フレキシブル部材の長手方向に沿って軸対称に形成された一組の挿通穴12a、12bと、それぞれの挿通穴に挿通された固定部間の長さL1、L2が異なる二本の線材13、14とを有するフレキシブルガイド9とする。線材の長さは調整可能とする。産業用ロボットの第一のアーム1と、アーム支持軸1aに対して回転自在に支持された第二のアーム2に、フレキシブルガイドの両固定部の開口穴7a、8aがアーム支持軸回りに同方向側に向くように、かつ、線材の長さが短い側の側面部7d、8dをアーム支持軸線側となるように各アームに固定する。
(もっと読む)
ロボット
【課題】ロボットの可搬能力を維持しながらも精度良く外力を制御することができるようにした、ロボットを提供することを目的とする。
【解決手段】複数の関節部を有するアームと、アームを形成し、荷重を支持するアーム構造材と、複数の関節部を駆動させるとともに、アーム構造材に支持されるアクチュエータと、アーム構造材の部材内部に埋設され、当該アーム構造材にかかる荷重を測定する荷重センサと、荷重センサの検出結果に基づいて、アクチュエータの動作を制御するコントローラと、荷重センサからコントローラに接続されるセンサラインをアーム構造材の部材内部からアームの内部空間側に導入する配線孔と、を備えて構成する。
(もっと読む)
ロボット
【課題】ケーブルが断線したり、ケーブルが隣接する機器に干渉したりするのを防止できるロボットを提供すること。
【解決手段】ケーブル50、51が接続される溶接ハンド10と、ケーブル50、51を支持しつつ溶接ハンド10の3次元空間上の位置および姿勢を変化させるアーム20と、を有する。アーム20は、複数の腕部22〜26で構成された多軸アームであり、溶接ハンド10と最先端の腕部である第5腕部26とは第6回転軸261で回転可能に連結され、第5腕部26と最先端から2番目の腕部である第4腕部25とは、第5回転軸251で回転可能に連結される。溶接ハンド10と第5腕部26との連結部分には、ケーブル50、51を支持する第1ケーブル保持部30が第6回転軸261で揺動自在に設けられる。
(もっと読む)
ロボット
【課題】ロボットアームに支柱を介してカメラを取付けるようにしたものにあって、カメラが障害物に衝突した場合における、カメラの破損等の不具合を極力防止する。
【解決手段】ロボットアームの第6アーム10の先端のフランジ面に、円柱状の支柱11を介してカメラ4を取付ける。支柱11の伸長方向の途中部分(上下方向中間部よりもやや上部寄り部位)に、支柱11の軸方向と交差(直交)する方向に延びる切欠き溝11bを設ける。支柱11に、切欠き溝11bを上下に跨ぐようにして、落下防止用のチェーン16を、緩みを有した状態で取付ける。チェーン16の長さ寸法は、カメラ4が宙吊り状態となっても、カメラ4のケーブル(コネクタまでの部分の長さ)が依然として緩みを有しているような寸法とされている。
(もっと読む)
線条体動作制限装置、および該装置を備えたロボット
【課題】本発明は、線条体の余長によって生じる干渉領域を最小限におさえて、線条体の周辺機器への接触を回避する線条体動作制限装置を提供することを目的とする。
【解決手段】本発明に係る線条体動作制限装置170は、前腕110、手首部120、前記手首部の先端に取付けられる作業ツール130、および前腕110を経由して作業ツール130に接続される可撓性のある線条体160を有するロボット100に設けられる、ロボット100の動作に適応させて線条体160の動作を制限する線条体動作制限装置170であって、手首部120において揺動軸線148回りに揺動自在に取付けられた揺動部173と、揺動部173上に配置され、線条体160の動作を制限する制限部170と、を備えたことを特徴とする。
(もっと読む)
アーク溶接用ロボット
【課題】一定以上の曲げ半径を有しつつ、アーム動作によって不都合な応力を受けないように引き回された溶接ワイヤ用コンジットを備えたアーク溶接用ロボットを提供する。
【解決手段】溶接ワイヤ用コンジット56は、ロボット架台14の後部から架台の貫通穴70を通り、架台に設けられた第2支持部材96によって支持され、旋回胴26の前方を通過し、必要な最小曲げ半径を有した状態で、その途中部分が旋回胴26の上部の第1支持部材72に支持されている。第1支持部材72を通過したコンジット56は、上腕30の後方に回り込み、ワイヤ送給装置52の後部のコネクタ74に、必要な最小曲げ半径を有した状態で接続されており、全体としてS字状に引き回される。
(もっと読む)
溶接ロボット
【課題】トーチケーブルの湾曲半径を大きく取ることができ、トーチケーブルのストレス軽減、ケーブル耐久性の向上を図ることができるとともに、ワイヤ送給時の送給抵抗が軽減されて安定した送給ができ、溶接への悪影響を抑制できる溶接ロボットを提供する。
【解決手段】
ワイヤ送給装置30は、溶接ロボット10の傾動台15に対して、支持部15aよりも、基端側寄りの位置に設けられることにより、回転軸線16からオフセットして、取付けられている。ワイヤ送給装置30のワイヤ送出口42と溶接用トーチ19間に接続されたトーチケーブル50はワイヤ送出口42から延出された部位が、アッパアーム14の軸部を通過しないように、該軸部よりもアッパアーム14の先端側に向けて延出されるとともに、回転軸線16に交差するように配置されている。
(もっと読む)
スカラ型ロボット
【課題】配線や配管の数が多い場合にも、配線や配管が劣化するのを抑制することが可能なスカラ型ロボットを提供する。
【解決手段】このスカラ型ロボットは、基台10と、基台10に対して回動可能に取り付けられた第1アーム20および第2アーム30と、一方側が基台10側に配置されているとともに、他方側が第2アーム30側に配置され、内部に配線および配管からなる配線配管51を収容可能なハーネス50と、一方側が第1アーム20側に配置され、内部に配線および配管からなる配線配管64を収容可能なチューブユニット60とを備えている。
(もっと読む)
線条体案内機構を備えた産業用ロボット
【課題】ロボットの手首部における線条体の寿命を延ばし、また、線条体をエンドエフェクタに案内する中間部材と線条体または線条体を覆う円筒部材との損耗を無くすこと。
【解決手段】中間部材33内の空間において線条体13を保持する線条体クランプ26を備え、線条体クランプ26が、第1のフランジ17と第2のフランジ18とに対して一定の隙間を有しつつ回転可能に第1又は第2のフランジ17、18に支持されるよう構成した。
(もっと読む)
線条体案内機構を備えた産業用ロボット
【課題】エンドエフェクタ用の線条体の屈曲半径が極端に小さくなることを無くすことによりエンドエフェクタ用の線条体の寿命を延ばし、また、ロボット本体と線条体との接触を少なくすることができる産業用ロボットを提供することを目的とする。
【解決手段】手首基部27に支持され、線条体15を手首第1軸28に沿って保持するクランプ24と、クランプ24よりも手首基部27の先端側に位置し、手首第2軸17と平行な第1の回転中心11で回転可能となるよう手首基部27に支持された回転体10と、第1の回転中心11と平行な第2の回転中心13で回転可能となるよう回転体10に支持された線条体保持器12と、を備えた。
(もっと読む)
産業用ロボットのケーブルガイド装置
【課題】産業用ロボットヘッドの動作時、ケーブルチューブが損傷することを防止できる効果を提供する。
【解決手段】産業用ロボットのケーブルガイド装置は、産業用ロボットのケーブルチューブの端部に結合されるリング状のチューブリングと、産業用ロボットのケーブルチューブに引き込まれた各々のケーブルが貫通する複数個のケーブル挿入孔を形成した状態でチューブリングに内挿されて結合されるケーブル分配器と、チューブリングの外周面に回転可能な状態で外挿されるリング状のチューブクランプと、チューブクランプの一側部に結合するヘッド結合部と、一端部が産業用ロボットのアームの外側部に外挿されて結合された状態で、他端部がヘッド結合部に結合して産業用ロボットのケーブルチューブがアームの外側部から一定距離離隔されるようにするクランプ支持部とを備える。
(もっと読む)
ロボット
【課題】フラットケーブルを剥き出しで使用しても、他の物体へ干渉することなく、フラットケーブルが損傷しない構造を持つロボットの提供。
【解決手段】ロボット1を形成するアーム8、第1昇降部11および第2昇降部12は鉛直なR軸を中心に旋回可能に形成されている。また、第1昇降部11はアーム8に対して上下移動可能に接続され、さらに第2昇降部12は第1昇降部11に対して上下移動可能に連結されている。第2昇降部12にはワークに処置を施すツールを取り付け可能な回転軸用モータ30が取付けられており、回転軸用モータ30へ電力を供給するためのフラットケーブル32がアーム8から引き出されて回転軸用モータ30へと接続されている。フラットケーブル32のアーム8および第2昇降部12への取付部位の間は下方に垂れ下がっており、第1昇降部11および第2昇降部12がアーム8に対して最も下降した場合に、この垂れ下がり部45は第2昇降部12の下端46よりも上方に位置している。
(もっと読む)
吊り型ロボット
【課題】電源ケーブルや信号ケーブルを収納したケーブルベア(登録商標)がロボット本体の移動に伴って屈曲するとき、ケーブルどうしが互いに擦れあったり、ケーブルベアとケーブルとが擦れあったりすることを極力防止する。
【解決手段】複数のケーブルを上下に並列した状態で一体化してフラットケーブル29を構成し、このフラットケーブル29がケーブルベア22の外周側の側面に押し付けられ、且つ、フラットケーブル29のケーブルベア22への収納部分の両側を上方に傾けることによりフラットケーブル29がケーブルベア22の上下両内面から離れた状態に保持してフラットケーブル29の両端部を固定する。
(もっと読む)
ロボット
【課題】作動軸の中空部に接続部材が挿通する構造を採りながら、クリーンルームでも使用可能なロボットを提供する。
【解決手段】中空な作動軸5と、この作動軸5を回動と軸線方向への移動とのうち少なくともいずれか一方が可能となるように支持する揺動式アーム4と、アームを支持する基台2とを備える。作動軸5の中空部に、空気配管、電力供給用あるいは通信用のケーブルのうち少なくとも一つからなる配管等104を挿通する。この配管等104における作動軸5から導出された部位にコイル状の弾性変形可能な余裕部111,112を形成する。この余裕部の一端部を作動軸5に支持させ、他端部をアーム4に支持させる。アーム4に作動軸5と余裕部111,112とを覆うカバー9を備えさせる。このカバー9の内部を基台2まで延びる通路に連通させ、この通路に配管等104を通して基台2に導いた。
(もっと読む)
ロボット
【課題】作動軸を貫通する接続部材が作動軸の回動により損傷するのを防ぐ構成を採りながら、設置スペースが狭くてよいロボットを提供する。
【解決手段】作動軸5の軸心部に、作業部材に接続される接続部材(配管等)104を通す中空部が形成される。接続部材を、空気配管、電力供給用あるいは通信用のケーブルのうち少なくとも一つによって構成する。接続部材における前記作動軸5の他端部から導出された部位をねじりコイルばねとなるようにコイル状に形成する。このコイル状部分を前記アームの支持部材(上部支持部材)116によって作動軸5と同一軸線上に保持させる。このコイル状部分の一端部を作動軸5に一体に回動するように支持させ、他端部を支持部材によって作動軸5と一体に回動することがないように作動軸5の回転方向において支持させる。前記コイル状部分の他端部と前記アームとの間で接続部材を保持する保持部材を備えている。
(もっと読む)
1 - 20 / 44
[ Back to top ]