
Fターム[3C007EV03]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 変形しない当接部の形状 (352) | V型 (40)
Fターム[3C007EV03]に分類される特許
1 - 20 / 40
ロボットハンド及びロボット装置
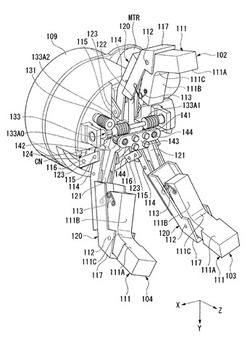
【課題】簡素に低コストで異種形状や寸法違いを含む多種の対象物を把持することが可能なロボットハンドを提供する。
【解決手段】第1の指部103と第2の指部104とを含む3以上の指部と、3以上の指部を開閉動作させる駆動部MTRと、第1の指部103と第2の指部104の開閉動作を行う向きを変更する指部移動機構と、を備え、指部移動機構は、ウオームホイール131と、モーターと、ウオーム133と、を備え、第1の指部103にはウオーム133の回転に連動してウオーム133の回転方向とは異なる方向に回転する第1歯車141が設けられ、第2の指部104にはウオーム133の回転に連動して第1歯車141の回転方向とは反対の方向に回転する第2歯車142が設けられており、第1の指部103と第2の指部104とは、モーターが回転することにより互いに近づく方向もしくは遠ざかる方向に回転する。
(もっと読む)
ロボット、ロボット用ハンド

【課題】対象物を確実に把持して運搬するロボット、ロボット用ハンドを提供することを課題としている。
【解決手段】2つの爪部を備え、各爪部における他方の爪部との対向面に凹部が形成されて、各爪部が基端を揺動軸として揺動することで凹部にて対象物を把持するロボットであって、各爪部の前記凹部は、爪部の先端部と揺動軸との間に、基端側の面と、先端側の面とを有し、爪部を揺動軸の軸方向に軸視した場合、基端側の面を含む直線と先端側の面を含む直線とが交差する点を基点とし、基点を通る線を基線とし、基端側の面の縁線における揺動方向の内側の端点を通り基線と直交する線を直行線とした場合、基線と先端側の面を含む直線とのなす角の角度αが0度より大きく90度未満であり、直行線と基端側の面を含む直線とのなす角の角度βが0度より大きく90度未満であり、基線における基点から直行線までの長さdが0より大きい。
(もっと読む)
ワーク搬送方法および装置
【課題】姿勢矯正手段を用いる必要なしに、ワークを常に適正に、かつ十分強固に把持して、所期した通りの姿勢で所定の作業ステーションまで、ワークを常に確実に搬送することができるワーク搬送方法を提供する。
【解決手段】中空もしくは中実の軸部3と、軸部3の中間部に設けられたフランジ部4とを具え、基準面1上に載置されるワーク2の、フランジ部4を基準面1と直交する向きに押圧して、該フランジ部4の周面を基準面1上に線もしくは面接触させて、前記軸部3の中心軸線を基準面1に平行にした状態で、開閉駆動される一対のフィンガー12,12により、ワーク2のフランジ部4の周面を把持して、該ワーク2を所定の作業ステーションまで搬送する。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を対象物が載置された載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
ロボット
【課題】対象物を逃がさず且つ確実に決められた位置で把持することが可能なロボットを提供する。
【解決手段】一対の指部12と一対の指部12が接続された本体部11とを有し、一対の指部12の一端部14が本体部11と離間する位置に設けられた第1回転軸13の周りに回転可能に接続され、一対の指部12の他端側が第1回転軸13を中心として対象物が載置された載置面と平行な面で揺動することにより一対の指部12を開閉させて対象物を把持する把持部10Aと、対象物と把持部10Aとを相対移動させる移動装置と、移動装置を制御して把持部10Aを対象物に向けて相対移動させ、対象物の周辺に一対の指部12を配置させた後、把持部10Aを制御して一対の指部12を載置面と平行な面で開閉させ、対象物の側方から一対の指部12の間に対象物を挟み込ませ、3点以上の接触点で把持部10Aに対象物を把持させる制御装置と、を備えている。
(もっと読む)
計測機能付きチャック装置及びロボットチャック装置
【課題】計測機構が小型軽量で且つ適切に収容され、測定圧を一定にして計測精度をより向上できる計測機能付きチャック装置及びロボットチャック装置を提供すること。
【解決手段】一方の電極11Aに対し、他方の電極12Aが、所要の間隔を保ちつつスライド可能に配されたセンサー部10Aと、両電極11A、12Aに関する静電容量を検出する容量検出素子40と、容量検出素子40によって得られた信号に基づいて計測情報を出力する計測情報出力回路50と、一方の電極11Aが固定される基部20と、ワークに対して接離動可能に設けられてワークに当接されるチャック用可動爪部30Aと、チャック用可動爪部材30Aに乗った状態で付勢部材39によってワークへの当接方向へ付勢されると共にその付勢部材39の付勢力に抗して後退可能に配されたワークへの計測用接触部37を備え、且つ他方の電極12が一体の計測用可動部材36とを具備する。
(もっと読む)
ロボットハンド
【課題】新たな機能を搭載したロボットハンドを提供する。
【解決手段】ボール14やブロック15といった物体を挟み込んで把持するために複数の指本体5を備えたロボットハンド1は、以下のように構成されている。即ち、指本体5には、その指本体5の把持面8と反対側の反把持面10に、例えば手提げバッグ12といった他の物体を引っ掛けることが可能な引っ掛け部11が形成されている。引っ掛け部11は、指本体5の反把持面10に凹状に形成されている。各指本体5の先端部5cには、把持側に突出した突部9が形成されている。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
ロボットハンド
【課題】 直径の異なる円筒形部分を有するワークの前記円筒形部分をその径方向に把持する場合に、円筒形部分の直径が大きく異なっても、作動を中断することなくかつ部品を交換することなく、ワークの把持部を安定して把持することができるロボットハンドを提供する。
【解決手段】 直径の異なる円筒形部分5aを有するワーク1の円筒形部分をその径方向に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。爪12は、チャック装置により開閉される開閉部材12aと、開閉部材に爪の長手方向に伸縮可能に取り付けられた先端部材12bと、先端部材を爪の長手方向に伸縮させるアクチュエータ12cとを有しており、開閉部材12aと先端部材12bは、ワーク1の円筒形部分5aに接触してこれを把持する互いに交差する把持面13a,13bをそれぞれ有する。
(もっと読む)
ロボットハンドとその爪部材交換方法
【課題】 形状又は寸法の異なるワークを把持することができ、交換用の部品の収容スペースを小さくでき、かつその交換のためアクチュエータが不要であるロボットハンドとその爪部材交換方法を提供する。
【解決手段】 ワークを把持するロボットハンド10。複数の末端爪部材12と、末端爪部材同士の間隔を開位置と閉位置の間で開閉するチャック装置14と、末端爪部材に着脱可能に片持ち支持された複数の先端爪部材16とを備える。先端爪部材16は、ワークに接触してこれを把持する把持面を有する。
(もっと読む)
把持装置
【課題】把持装置の駆動装置を大型化することなく、寸法が異なる複数種類の対象物を把持できるとともに、把持する対象物の種類を変更する場合の対応時間を短縮ことができる把持装置を提供する。
【解決手段】寸法が異なる複数種類の対象物1、2を把持して移動させる把持装置10。対象物1、2を把持するように駆動される把持部3と、把持部3が動作可能に把持部を保持する保持体5と、把持部3に装着可能なアタッチメント7と、を備える。把持部3は、アタッチメント7が装着されていない時には、第1種類の対象物1を把持可能であり、アタッチメント7が装着されている時には、アタッチメント7を介して第2種類の対象物2を把持可能である。
(もっと読む)
遠隔操作用把持工具
【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
柱状体の搬送用チャック
【課題】柱状体、特にハニカム成形体の搬送用チャックを提供する。
【解決手段】柱状体をしたワーク(1)のクランプとアンクランプを行う搬送用チャックであって、該搬送用チャックは、駆動ユニット(12)と、該駆動ユニット(12)により接近、又は、離間する2つのアーム(11、11’)と、該アーム(11、11’)に、それぞれ回動自在に取り付けられたV字型形状をした2つのチャック爪(10、10’)を具備し、前記チャック爪(10、10’)は、弾性部材(19)により前記アーム(11、11’)に対して所定回動位置に復帰できるように付勢されていることを特徴とする。
(もっと読む)
成形装置および搬送装置
【課題】多様な形状の成形素材の正確な位置決めおよび搬送時間の短縮を実現する。
【解決手段】光学素子材料20を吸着保持する吸着パッド13と、光学素子材料20を把持して位置決めするチャック3を共通の吸着筒1に共通に固定し、吸着筒上下シリンダ12および吸着筒上下スライドステージ6によって同時に昇降させ、吸着パッド13は吸着パッド上下機構13aによって独立に吸着高さ位置を制御可能にし、光学素子位置決め台8に載置された光学素子材料20の外周部を一対のチャック3の間に把持して位置決めした後、吸着パッド13のみを降下させて光学素子材料20の上面を吸着保持させ、吸着パッド13およびチャック3によって位置決めされて保持された状態の光学素子材料20を、脱落させることなく、高速かつ正確に成形下型11に載置する。
(もっと読む)
ワーク設置装置と設置方法及び持ち上げ方法
【課題】専用の位置出し装置を用いずに、ワークと被設置部材の自動設置を行うことができ、搬送装置側に過剰な力を免れる機構が不要であり把持機構を小型・軽量化でき、かつ特別な制御アルゴリズムが不要であり制御負荷を小さくできるワーク設置装置と設置方法及び持ち上げ方法を提供する。
【解決手段】3次元的に移動可能な把持機構5に取り付けられ、水平方向に移動可能であり、その間に鍔部を開放可能に把持可能な複数のツメ部材12と、複数のツメ部材を互いに連動して水平反対方向に駆動する開閉アクチュエータ14とを備える。ツメ部材12は、ワーク1の鍔部1bの水平な下面1cを支持する水平な支持面12aと、鍔部1bの外面又は上縁部を把持する把持面12b,12cとを有する。
(もっと読む)
マテリアルハンド用クランプ機構
【課題】ワークの基準孔への差し込み時には、左右のクランプ部の間隔を狭めて挿入するため、ワークズレの発生が少なく、シリンダーロッドを伸長させて内側から左右のクランプ溝によって押圧するため、クランプ力が大きく搬送中にワークの落下することを防止する。
【解決手段】シリンダー1と、支持部20及び支持部に直角方向に設ける頭部21とからなるT字状支持体2と、スライドクランプユニット3とを有し、スライドクランプユニット3は、T字状支持体の頭部に沿って左右に移動可能である左右のクランプ部30と、左右のクランプ部30のそれぞれとシリンダーロッド10との間に2つのリンク32を回動自在に設けてなり、シリンダーロッドの伸長により左右のクランプ部30のクランプ溝31によってワークをクランプ状態にし、シリンダーロッドの縮短によりアンクランプ状態にするマテリアルハンド用クランプ機構による。
(もっと読む)
チャック機構およびそのチャック機構を用いたワーク搬送装置
【課題】径が異なる円筒形状のワークをチャックする際のチャック中心位置がずれないように、チャック位置を調整するようにした、チャック機構およびそのチャック機構を用いたワーク搬送装置を提供する。
【解決手段】開閉可能に構成した第1、第2アーム(11a、11b)により円筒形状のワーク(W)をチャックするものである。
第1、第2アーム(11a、11b)は、それぞれ、ワーク(W)の外周との接触箇所を、ワーク(W)の外周と二箇所で接触する接触面とした第1、第2爪部(13、14)を有し、これら第1、第2爪部(13、14)のうち、いずれか一方の爪部を、第1、第2アーム(11a、11b)の開閉方向に直交する方向に往復動可能な構成とする。
(もっと読む)
把持装置および方法
【課題】把持装置および方法において、把持開口の大きさを正確に設定することができ、安定した把持動作を行うことができるようにする。
【解決手段】把持装置が、把持ユニットに対して動作制御値を送出して把持ユニットの動作を制御する把持機構制御部117と、把持部材によって形成される把持開口の大きさを算出するための画像処理部112と、複数の動作制御値に対して画像処理部112で算出された把持開口の大きさから、動作制御値に対する把持開口の大きさとの関係を表す校正データを生成する校正データ生成部113と、校正データを記憶するデータ記憶部116と、把持ユニットに対する動作制御値データをデータ記憶部116に記憶された校正データに基づいて生成して、把持機構制御部117に送出する装置制御部115とを備える。
(もっと読む)
物品把持装置及びそれを備えたロボット
【課題】一台で外形形状が大きく異なる二種類以上のワークを把持可能な物品把持装置を提供する。
【解決手段】ハンド本体1に設けられ、互いに近接、離間動作が可能な一対の外爪2a、2bと、ハンド本体1に設けられたガイド5a、5bによって案内され、外爪2と同方向に動作可能な一対の内爪6と、を備え、一対の外爪2a、2bの先端と一対の内爪6の先端とが互いに異なる方向に向くよう形成され、一対の外爪2に、一対の外爪2a、2bが互いに近接したとき一対の内爪6a、6bに当接してこれらを互いに近接させる突起部2c、2dが設けられた物品把持装置とした。
(もっと読む)
産業用ロボットのハンド装置
【課題】電源ダウン時、非常停止時又は制御システムで異常を検出した場合など、ハンド装置の把持装置への電源供給を遮断せざるを得ないとき、把持装置が把持力を維持することができ、ワークを把持している場合にはワークを落下させることがない産業用ロボットのハンド装置を提供。
【解決手段】サーボモータ3を作動させることによりフィンガー7を開閉動作させてワークをクランプし、サーボモータ3を停止させ、次にエアシリンダ14のロッド14’を作動させて偏心軸13をガイド溝16内で回転させ、スライド4をフレーム1に対し偏心軸13の偏心量相当分だけボールねじ2の軸方向にスライドさせてフィンガー7を開閉させてワークを把持するようにした。
(もっと読む)
1 - 20 / 40
[ Back to top ]