
Fターム[3C007FT17]の内容
マニピュレータ、ロボット (46,145) | 吸着部の構造 (500) | 浮動するもの (104) | バネ (52)
Fターム[3C007FT17]に分類される特許
41 - 52 / 52
ウェハ搬送装置

【課題】ウェハの抗折強度の低下を抑制することの可能なウェハ搬送装置を提供する。
【解決手段】ウェハ搬送装置は,ウェハを吸着部により真空吸着して搬送する装置であり,吸着部は,アルミナを主成分とした材料から形成され,気孔率が34〜40%である。吸着部の表面における気孔以外の部分の表面粗さRyは,5μm以下であることを特徴とする。これにより,吸着部のウェハとの接触面における凹凸の高低差が小さくなるため,ウェハに与えるダメージを低減することができる。したがって,吸着部によりウェハを吸引保持する際に発生する,ウェハの抗折強度の低下を抑制することができる。
(もっと読む)
電子部品吸着ノズル、部品移載装置、ICハンドラーおよび表面実装機

【課題】電子部品の高さが所定の高さより高くなったとしても供給時に衝撃を確実に緩和することができる電子部品吸着ノズル、部品移載装置、ICハンドラーおよび表面実装機を提供する。
【解決手段】筒状に形成され吸着ヘッドの下端部に取付けられる本体2を備える。電子部品と接触する吸着面23aを有し、本体2の中空部内に昇降自在かつ上下方向の軸線回りの回動が規制された状態で挿入された吸着部材3を備える。この吸着部材3の下降方向における最下端の位置を規制する下端位置規制手段(貫通孔16とピン17)を有する。吸着部材3を下方と回転方向とに付勢するコイルばね4を備える。吸着部材3にコイルばね4の下端部を支承する受け部22を設ける。コイルばね4を本体2を巻回するように受け部22と本体2との間に弾装した。
(もっと読む)
IC搬送装置及びコンタクタ
【課題】 ICデバイスを移送するIC搬送装置に用いられ、ICデバイスを吸着保持するコンタクタにおいて、ICデバイスの搬送効率の向上を図り、かつ、IC搬送装置の製造コスト及びランニングコストの削減を図ることができるようにする。
【解決手段】 第1のエアライン31を有する本体部33と、一端が前記第1のエアライン31に連通可能とされ、他端が外方に開放される第2のエアライン41を有すると共に、これら第1及び第2のエアライン31,41を相互に連通又は遮断する位置の間で前記本体部33に対して移動自在なシリンダ43と、前記第1及び第2のエアライン31,41を相互に遮断する位置に向けて前記シリンダ43を付勢する付勢手段47と、前記第1及び第2のエアライン31,41を相互に連通する位置に前記シリンダ43を保持する保持手段とを備えることを特徴とするコンタクタ7を提供する。
(もっと読む)
保持装置および保持装置を有する搬送装置
【課題】被搬送物を着脱自在に確実にかつ安定して吸着して保持する保持装置を提供すること。
【解決手段】基部に配置されて第1通路111Aを有する継手部111と、第2通路113Aを有し第1通路111Aと第2通路113Aを通じて吸引することで被搬送物Dを保持するノズル先端部113と、ノズル先端部113と継手部111を接続する伸縮自在な胴体部114であり、第2通路113Aと第1通路111Aとを連絡する胴体部114と、ノズル先端部113と継手部111の間に配置されてノズル先端部113を継手部111から離れる方向に沿って付勢するための付勢部材と、基部に対して固定されている受け部116でありノズル先端部113が被搬送物Dを吸着する時にノズル先端部113を付勢部材115の力に抗してノズル先端部113の軸方向に移動する際にノズル先端部113を案内する案内孔を有する受け部116を備える。
(もっと読む)
吸着体、およびシート取出装置
【課題】 積み上げられた複数のシートから、その最上部のシートを1枚ずつ取り出す、という取出作業が、より容易に、かつ、確実にできるようにする。
【解決手段】 吸着体9は、その下端部に下方に向かって開口する開口部13が形成され、この開口部13と連通する内部空間14が形成されている。吸着体9の下端面がシート2の上面に接合可能とされる。内部空間14の空気11が吸引可能とされる。この吸引により内部空間14にシート2の部分2aが吸入される。吸着体9は、下端部に開口部13が形成された縦向きの筒状部15と、この筒状部15の上端開口を閉じる天井部16とを備える。内部空間14の軸方向各部の断面積を開口部13の断面積とほぼ同じ、もしくは、より大きくする。
(もっと読む)
保持装置
【課題】吸着し保持する対象物を開放するとともに伸縮可能でチャック装置との干渉を避けることができる保持装置を提供する。
【解決手段】伸縮型保持装置10は、流体を独立して導入排出可能な帯状の管であって一体的に形成された第1変形部2a、第2変形部2b、第3変形部2c及び第4変形部2dと、各変形部に密着かつ固定されて板状に形成された真空排気可能な帯状の管で吸着穴5を有する保持部6とを備え、各変形部と保持部6とが密接する箇所に、形状維持用スプリング8a、8b、8c、8dが設けられている。保持部6を真空排気して基板を吸着保持し、各変形部に充填した流体を排出して流体圧をゼロにしていくと形状維持用スプリング8a、8b、8c、8dの自然状態の形状に変形していき、保持装置の先端が曲がり、チャック装置との干渉を避けることができる。可変ステージ及び可変ハンドとして使用可能である。
(もっと読む)
シート部材の組付け方法
【課題】2台のロボットを用いてシート部材の組付けを行うと共に、被組付け物の位置を力覚センサを用いて検出できるようにして、設備費の大幅な削減を図る。
【解決手段】2台のロボットの動作端に取付けた第1と第2の2つの治具11,21によりシート部材2を保持する。両治具11,21を接近させてシート部材2を弛ませた状態で、第1治具11に設けたピン16を被組付け物1の基準孔に押し込み、第1治具11とロボットの動作端との間に介設した力覚センサで検出される位置検出ピンの押し込み反力に基づいて第1治具11の位置を修正し、位置検出ピン16が基準孔に同心で挿入されたときの第1治具11の位置に基づいて被組付け物1の位置を検出する。検出された被組付け物1の位置に基づいて第1と第2の両治具11,21を被組付け物1に対し位置合わせし、被組付け物1にシート部材2を組付ける。
(もっと読む)
吸着ノズルアウタのガタ検出装置
【課題】吸着ノズルの着脱を行うノズルアウタのガタ検出装置の提供。
【解決手段】実装機のヘッドユニットに昇降及び回動自在に設けられ、その内部に負圧供給路を有するノズルシャフト1と、ノズルシャフト1を上下動するZ軸モータ2と、ノズル下端に上下動可能に支持したノズルアウタ4と、常にはノズルアウタ4を下方に押圧する弾性体と、ノズルアウタ4の上下動によりノズルシャフト1の負圧供給路内に出没し、ノズルシャフトの負圧経路内に挿入される吸着ノズルに形成した溝部に嵌合することにより吸着ノズルの上下動を規制する嵌合部材と、実装機の所定位置に設けられ、少なくとも前記ノズルアウタ4の下面の一部と対向する歯部を形成したノズルガタ検出部とを備えた。
(もっと読む)
ガラス基板供給装置
【課題】 ハンドに保持されたガラス基板の位置精度を高め、ガラス基板がマガジン等に接触して損傷するのを確実に防止する。
【解決手段】 マガジン11に対して進退移動可能な搬送用ロボット10のハンド21に、ガラス基板12を吸着保持する複数の吸着保持手段を設け、また搬送用ロボット10の旋回台20にガラス基板を収納方向と直交する方向に芯出し位置決めする芯出し位置決め手段51を設け、該芯出し位置決め手段によってガラス基板を芯出し位置決めした状態で旋回台を旋回するようにした。
(もっと読む)
移載装置
【課題】 ウエハ等の脆質性を備えた板状体を吸着する支持プレートの平行度を高精度に保ってウエハの損傷原因を回避できる移載装置を提供すること。
【解決手段】 半導体ウエハWの支持面20Aを備えた支持プレート11と、これを支持するアームプレート30と、これら支持プレート及びアームプレート13との間に設けられた平行度調整手段14とを備えて移載装置10が構成されている。支持プレートは、支持面から空気の吸排が可能に設けられ、空気吐出状態で半導体ウエハWに接近したときの反作用でウエハに対して平行に保たれ、当該平行を保った状態でウエハに接した後に当該ウエハを吸着して移載することができる。
(もっと読む)
半導体基板吸着ハンド及びその操作方法
【課題】 半導体基板が大型化し且つ薄くなって表面が反ってしまうような状態でも確実に吸着することができ、半導体基板を処理する吸着ステージへセットすることが容易であり、半導体基板の表面汚染を著しく少なくできる半導体基板吸着ハンド及びその操作方法を提供する。
【解決手段】 半導体基板吸着ハンドは、アーム1に支持され、半導体基板15を保持するチャック10と、チャック中央部に設けられ半導体基板を真空吸着する基板吸着部11と、チャック周辺部に設けられ半導体基板の周辺部を抑える複数のピン8とを備え、基板吸着部には、先端部の径が他の部分より小さい複数の突起が植設され、半導体基板を吸着する際には、先端部が半導体基板に接触するように構成されている。このハンドを用いて半導体基板を平面状に修正しながら吸着する。
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 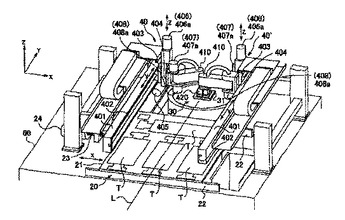 (もっと読む)
(もっと読む)
41 - 52 / 52
[ Back to top ]