
Fターム[3C007FT17]の内容
マニピュレータ、ロボット (46,145) | 吸着部の構造 (500) | 浮動するもの (104) | バネ (52)
Fターム[3C007FT17]に分類される特許
21 - 40 / 52
フローティングチャック装置及びフローティングチャックユニット
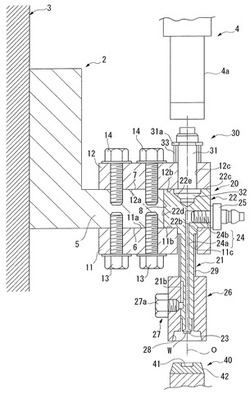
【課題】 簡易な構成でもってチャックのフローティングを可能としコンパクト化を図ることができるフローティングチャック装置及びフローティングチャックユニットを提供する。
【解決手段】 上下方向に延びる軸部21を有し、その先端の吸着部にワークを吸着させて該ワークWを保持するチャック20が、該チャック20を移動させる移動基板3に対してフローティング可能に支持されるフローティングチャック装置10又はこれが複数並設されたフローティングチャックユニット1において、チャック20にフランジ部22を設け、軸部21を挿通させるチャック挿通孔11cを有しフランジ部22を支持する第一ガイドブロック11と、該第一ガイドブロック11と対をなしフランジ部22を上方から挟み込む第二ガイドブロック12とを設け、第一ガイドブロック11とフランジ22との間、及びチャック挿通孔11cと軸部21との間にクリアランスn1、n2を形成する
(もっと読む)
基板保持機構およびそれを用いた露光装置並びにデバイス製造方法

【課題】 基板の両面を同時に保持することにより、保持面積の拡大、保持力の向上を図ると共に、基板受け渡し面のチルト補正の容易化、基板の面精度の維持を可能にし、装置全体の基板搬送スループット向上、および搬送精度の向上を実現する。
【解決手段】 基板8の両面の一方を吸着する第1保持部2,3と、他方に当接してそれを支持する第2保持部6,7と、基板を吸着した第1保持部を第2保持部側へ付勢する付勢手段4,5とで基板保持機構1を構成する。
(もっと読む)
板状物搬送装置
【課題】 保持テーブルと吸着パッドの平行度の自動調整を可能にした板状物搬送装置を提供することである。
【解決手段】 テーブル表面の傾きが異なる複数の保持テーブル間で板状物を搬送する板状物搬送装置であって、水平移動、垂直移動及び旋回移動可能に支持されたアームと、アームの先端部に固定された支持ベースと、板状物を吸着保持する吸着パッドと、吸着パッドを支持ベースに傾き調整自在に支持する支持手段と、吸着パッドを保持テーブルと平行となるように調整する調整手段とを含んでいる。支持手段は複数のロッドと各ロッドに遊嵌された圧縮ばねとを含んでおり、調整手段は流体を保持テーブルに向かって噴射する同一円周上に等間隔で配置された3個以上の流体噴射ノズルを含んでいる。
(もっと読む)
保持具
【課題】吸着したワークを落下し難くした保持具を提供することを課題とする。
【解決手段】吸着パッド10は、油を収容しているシリンダ12と、シリンダ12内を下室30と上室32とに分けるピストン16と、を備えている。下室30はワーク吸着側である。また、吸着パッド10は、ピストン16が取付られるとともにシリンダ12を貫通するピストンロッド18と、下室30を狭める方向にピストン16を付勢するコイルバネ22と、を備えている。また、ピストン16とシリンダ内壁面12Sとによって、上室32と下室30とに連通しオーリング34が収容される中間室38が形成されている。ピストン16には、上室32と中間室38とに連通し中間室38から上室32へ流れる際の油の流動がオーリング34によって妨げられる上室側環流孔42と、上室32と中間室38とに連通するオリフィス50と、形成されている。
(もっと読む)
吸着ノズルおよび表面実装機
【課題】内部に異物が付着し難く、清掃作業の頻度を減らすことができる吸着ノズルおよよび表面実装機を提供する。
【解決手段】部品吸着面49と空気通路とが形成されたノズル本体22と、ノズル本体22嵌合用の嵌合孔26を有し吸着ヘッド3に取付けられるノズルホルダ21とを備える。ノズル本体22の係合溝48に係合してノズル本体22の移動量を所定量に規制するピン23と、ノズル本体22を付勢する圧縮コイルばね25とを備える。前記圧縮コイルばね25を、ノズル本体22の外側でノズル本体22とノズルホルダ21との間に弾装する。前記係合溝48を、ノズル本体22における空気通路47の外側に形成する。前記ピン23を、係合溝48に係合しかつノズルホルダ21とノズル本体22との嵌合部を横切るようにノズルホルダ21に支持させた。
(もっと読む)
実装ヘッド
【課題】ノズルの小型化を可能にした実装ヘッドを提供する。
【解決手段】部品P1の吸装着を行う先端部11が所定の行程で上下移動可能なノズル5と、ノズル5を所定の行程で上下移動可能に下端部に保持するノズル保持部4と、ノズル保持部4を下方に付勢する第1バネ6と、先端部11を下方に付勢する第2バネ12を備えた実装ヘッド1において、先端部11が上方に移動することで部品装着時に部品P1に作用する衝撃を緩衝し、先端部11が上方に最大行程移動した後にノズル保持部4が上方に移動するように構成した。
(もっと読む)
ガラス搬送ロボットハンド
【課題】 搬送ロボットハンドにより、ガラス板をパレットへ積みつける際に、ガラス板のズレ現象を防止するため、合紙をガラス板間に挟むようにするが、その合紙もガラス板と同時にパレットへ搬送できるロボットハンドにする。しかし、その搬送の際に風圧による合紙のめくれと、パレット積載時の合紙の垂れ下がりとによるトラブルを防止し、効率的なガラス搬送ロボットハンドを提供する。
【解決手段】 二つの課題を解決するため、ガラス搬送ロボットハンド10に吸着されたガラス板1面前に対向して合紙2を配置させると共にそれら面間にブローによるブローダウンする風を送り吸着させ、その風向をガラス面と合紙の4角の対向面方向に特に向け、搬送中のめくれ、と、積付け時の垂れ下がりを発生させないことを特徴とするガラス搬送ロボットハンド。
(もっと読む)
ウエーハの搬送装置
【課題】ウエーハの裏面に装着された接着フィルムが付着することなく搬送することができるウエーハの搬送装置を提供する。
【解決手段】チャックテーブルに載置されたウエーハを吸引保持する保持パッドを備えたウエーハの搬送装置であって、保持パッド2は、下面に開口する複数の吸引孔36を備えた保持プレート3と、保持プレートの上面に下面が積層され保持プレートとの間に複数の吸引孔と連通する吸引通路形成する吸引通路形成プレート4と、吸引通路形成プレートの上面に下面が積層され吸引通路形成プレートとの間に冷却室50を形成する冷却室形成プレート5とを具備しており、保持パッド2の吸引通路41が吸引手段に連通され、冷却室50が冷却媒体供給手段に連通されている。
(もっと読む)
部品移載装置及び表面実装機
【課題】移載精度を高めた表面実装機を提供する。
【解決手段】本発明の部品移載装置である表面実装機10は吸着ノズル70の嵌合軸部71とノズルホルダ80の嵌合孔81とが嵌合可能に設けられ、嵌合軸部71に設けた受け溝75の上側となる受け面76と、ノズルホルダ80に設けた切欠部86の下側となるストッパ面88と、受け面76及びストッパ面88に当接するホルダーピン100と、ホルダーピン100をノズルホルダ80の外側から内側方向に向けて押圧してホルダーピン100を受け面76及びストッパ面88に押し当てることにより嵌合軸部71の突当面77が規制部83Aに当接する方向に付勢する保持バネ110とを備えている。これにより、吸着ノズル70の固定位置精度を高めガタ付きを無くすことで、移載精度を高めることができる。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】吸着パッドが半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドからエアーを噴射させながら下動させる。そして、検査用ソケットにICチップの上面に接触するとき、吸着パッドから噴射しているエアーが、ICチップにて塞がれるようにした。従って、エアーの噴射が塞がれることにより、吸引管内のエアーの圧力の上昇を圧力検出センサが検出することによって、吸着パッドが検査用ソケット内のICチップに接触する高さを求めることができる。
(もっと読む)
電子部品ピッカー及びこれを備えたハンドラー用ヘッドアセンブリー
【課題】電子部品ピッカー及びこれを備えたハンドラー用ヘッドアセンブリーを提供する。
【解決手段】本発明の実施形態に係る電子部品ピッカー100は、ピッカーベース110と;ピッカーベース110に固設されたベースブロック120と;ベースブロック120に少なくとも昇降可能にそれぞれ結合されたもので、電子部品を吸着及び脱着するノズル132を備える複数のノズルアセンブリー130と;それぞれのノズル経路に正圧及び負圧を供給する部品吸脱着機構140と;ノズルアセンブリー130を昇降駆動するように配置されたノズル昇降機構150を含む。
(もっと読む)
基板吸着装置およびそれを用いた基板搬送ロボット
【課題】吸着力を保持しながら基板の変形に追従するとともに、外力が開放されたとき(基板開放時)に元の位置に戻る復元力を有し、安定的な基板吸着装置およびこれを用いた搬送ロボットを提供する。
【解決手段】基板吸着部141を有する中空の吸着パッド14と、この吸着パッド14を弾性的に支持する弾性部材からなるパッド支持部材15と、エア吸着力を発生する基板吸着部141とを備えた基板吸着装置13において、
摩擦低減機構を有するマニホールド16と、前記吸着パッド14と前記マニホールド16との間に弾性体18を備えたものである。
(もっと読む)
部品装着ヘッド及び部品装着装置
【課題】吸着ノズルにて部品を吸着保持して、基板上の部品装着位置に配置し、吸着保持の解除を行なうことで上記部品を上記基板に装着する部品装着において、多種多様な部品の吸着保持を確実かつ効率的に行うことができる部品装着ヘッドを提供する。
【解決手段】吸着ノズルを第1ノズル部と上記第1ノズル部よりも大きな第2ノズル部とを備える2重ノズル構造として、上記第1ノズル部の第1吸着保持面が突出される第1の吸着保持位置と、上記第2ノズル部の第2吸着保持面と同じ位置である第2の吸着保持位置との間で上記第1ノズル部を移動可能とするとともに、上記突出位置に位置された状態では上記第2ノズル部内の第2の吸引用通路を閉止して、上記格納位置に位置された状態では上記第2の吸引用通路の閉止を解除させる通路閉止部を備えさせて、第1と第2の吸着保持位置にて吸着領域を変化させる。
(もっと読む)
ウェハ搬送ハンド
【課題】空気通路のメンテナンスが容易で、ロボットに再ティーチングを行なわなくても、ウェハをチャックにセットできる薄形のウェハ搬送用ハンドを提供する。
【解決手段】上面にウェハ吸着面を持つ薄板状のハンド本体(13)が、その後端部(305)にて、ロボットアーム(19)上で支持される。ハンド本体(13)は、ロボットアーム(19)に対して、ウェハ吸着面に垂直な方向へ移動可能なように弾性的に支持される。ハンド本体(13)内の空気通路(307)はハンド本体(13)の下面から掘られた溝であり、そこに蓋(323)が被せてある。ハンド本体(13)の下面の蓋(323)を覆う領域に樹脂テープ(325)が貼られ、樹脂テープ(325)が空気通路(307)の蓋(323)の周囲の隙間を封止する。樹脂テープ(325)を剥がし蓋(323)を外すと、空気通路(307)の掃除ができる。
(もっと読む)
吸着装置及びこの吸着装置を用いた吸着方法
【課題】 湾曲部や傾斜部等を有するワークを吸着保持する場合でも、ワークの表面に擦り傷等が発生するのを防止して確実に保持できるようにする。
【解決手段】 ピストン部材6が内装される円筒部2の下方に支持部材4を配設し、この支持部材4に、ピストンロッド8を挿通させるための小径孔10と大径孔11を設け、ピストンロッド8の先端にバキュームカップ16を取付ける。支持部材4の側面から大径孔11に向けて第1吸引孔13を穿設し、ピストンロッド8の中心部に、バキュームカップ16内に開口する第3吸引孔17を設け、大径孔11と第3吸引孔17を連通する第2吸引孔18を設ける。ピストン室5に連通する大径孔11の連通面積に較べて、第3吸引孔17に連通する第2吸引孔18の連通面積を小さくする。
(もっと読む)
ウエーハの保持パッド
【課題】外周部に環状の補強部が設けられ凹部が形成されウエーハであっても破損させることなく吸引保持することができるウエーハの保持パッドを提供する。
【解決手段】表面に複数のデバイスが形成されたデバイス領域とデバイス領域を囲繞する外周余剰領域とを備えたウエーハを保持するウエーハの保持パッドであって、外周余剰領域に対応する環状の吸引保持面を備え該吸引保持面に吸引孔が開口された保持部と、保持部を支持する支持部とを具備している。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
物品搬送ロボット
【課題】 物品を過度なストレスを与えることなく搬送可能であり、併せて搬送した物品を所定の位置に精度良く配置可能である物品搬送ロボットを提供する。
【解決手段】 ハンドのベース1に取り付けられた吸着子2は、物品3に接触していないピックアップ位置から真空による吸引力により物品3を吸い上げて吸着する。ハンドを移動させて吸着子2をリリース位置に吸着子2を移動させ、吸着子2に作用している真空を切って物品3を解放し、所定の配置場所4に配置する。吸着時及び解放時に吸着子2が物品3を押圧することがないので、不都合なストレスを物品に与えることなく搬送することができる。
(もっと読む)
永久磁石を用いたワーク吸着装置
【課題】 ロボットによる曲げ加工システムにおいて、複雑な電気回路を設けることなく、群管理が可能であって、設置スペースが少なくて済み、段取り時間を短縮し、ワークを確実に解放できる永久磁石を用いたワーク吸着装置を提供する。
【解決手段】 シリンダ5の下端部を、ワークWに当接自在な当接ストッパとし、該ワークWを吸着する永久磁石9を、シリンダ5内のピストン7下端部に設けた。上記シリンダ5が、ロボット3のハンド本体4に多数取り付けられ、各シリンダ5の下端部には、弾性体で形成された当接ストッパ6が設けられていると共に、各シリンダ5の上端部には、エア配管21が結合され、該エア配管21は、既存のバキュームパッド用エア回路31に接続されている。
(もっと読む)
電子部品の吸着ノズル機構
【課題】 取出しと搭載における電子部品への押し付け力を簡便に変えることができる吸着ノズル機構を得る。
【解決手段】 小さいばね定数k1と自由長L1の圧縮コイルばね10と、大きなばね定数k2とL1より短い自由長L2を有する圧縮コイルばね12の2種の圧縮コイルばねを、圧縮コイルばね10を圧縮状態に収納すると共に、圧縮コイルばね12を遊びを有するように収納時の長さLsがL2<Ls<L1となるように組み込む。押付け量が0から遊びがなくなるLs−L2までの間は、小さいばね定数k1の圧縮コイルばね10のみの付勢力による押付け力をノズル1で電子部品に加えることができ、遊びがなくなってからのLs−L2より大きい押付け量では、小さいばね定数k1の圧縮コイルばね10と大きいばね定数k2の圧縮コイルばね12との相加された付勢力によるより大きな押付け力をノズル1で電子部品に加えることができる。
(もっと読む)
21 - 40 / 52
[ Back to top ]