
Fターム[3C007HT39]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | クラッチを有するもの (29)
Fターム[3C007HT39]に分類される特許
21 - 29 / 29
ロボット用連結部材の結合機構と歩行型ロボット
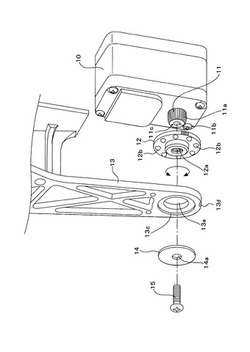
【課題】歩行型ロボット等において、外部から衝撃が加わったときにサーボ装置内の減速ギヤの破壊を防止する結合機構を提供する。
【解決手段】モータ、減速ギヤ等が内蔵されているサーボ装置の筐体10から突出している出力軸11に、サーボホーン12を嵌合すると共に、このサーボホーン12の接合面に外部に力を伝達するための連結部材13がワッシャ14を介して挿通されている止めネジ15によって圧接されている。サーボホーン12と連結部材の接合面には凸部12bが形成され、連結部材13の方には、この凸部12bと衝合する位置に凹部が設けられているので、連結部材13に外部から強い衝撃が印加されると、連結部材13とサーボーホーン12の結合状態が瞬間的に解除され、サーボ装置内の減速ギヤ等が破損することを防止する。
(もっと読む)
ロボットハンド機構

【課題】 水平方向から対象物品を把持し運搬する場合において、対象物品を安全に把持しかつ安定して運搬することのできるロボットハンドを提供するにある。
【解決手段】 ロボットハンド機構10は、マニピュレータに本体11が取り付けられ、この本体11からは、対象部品30を把持する一対のグリッパ12が延出されている。対象物品30の底面を支える支持用プレート13が本体11下の収納位置に配置されてその状態でロックされている。本体11に設けられた可動ピン15は、外部に当接させる動作で可動され、この可動ピン15に連動して支持用プレートのロックが解除されてグリッパ13下の支持位置に移行され、対象物品30を支持する。
(もっと読む)
ロボットハンドとその把持制御方法
【課題】コンパクトな構造でありながら把持形態の自由度が高く、しかも把持対象物の形状汎用性に優れたロボットハンドを提供する。
【解決手段】一対のフィンガー3A,3Bの根元側の関節4a,4bに差動歯車装置9a,9bとクラッチ8a,8bとプーリ10a,10bを、指先側の関節6a,6bにクラッチ12a,12bとプーリ13a,13bをそれぞれ介装し、プーリ10a,13a間と10b,13b間にベルト21を巻き掛ける。差動歯車装置9a,9bが共有する単一の主差動歯車装置14とこれを駆動するモータ15を設ける。各差動歯車装置9a,9b,14はクラッチを内蔵していて、主差動歯車装置14の出力を二つの根元側差動歯車装置9a,9bに分配しながら各クラッチをON−OFF制御して、対象物の把持とその開放とを行う。
(もっと読む)
ワーク搬送装置
【課題】 トランスファープレス等におけるワーク搬送装置において、ワーク把持装置を移動させるサーボモータの故障による運転停止の頻度を低減させるとともに、保守部品の保管・管理の負担を軽減することができる装置を提供する。
【解決手段】 所定のワーク1を把持するワーク把持部15と、ワーク把持部15にそれぞれ回転可能に接続された一対のアーム7,8と、各アーム7,8のそれぞれの他端に回転可能に接続されると共に往復直線移動する一対のスライダ4,5と、一対のスライダ4,5をそれぞれ駆動する一対の駆動部17,18と、を備えるワーク搬送装置101において、一対の駆動部17,18が、それぞれ複数のアクチュエータ31A,31B,32A,32Bにより構成される。
(もっと読む)
ロボットハンド
【課題】コンパクトな構造でありながら把持形態の自由度が高く、しかも把持対象物の形状汎用性に優れた二指把持タイプのロボットハンドを提供する。
【解決手段】ハンド本体2に一対のフィンガー3,3を対向配置する。各フィンガー3は、根元側指要素4aと第1,第2中間指要素4b,4cおよび先端側指要素4dを四つの関節5a〜5dをもって相互に連結した多関節構造のものである。各指要素4a〜4dは先端側になるにしたがってその形状および全長が段階的に小さくなるように設定されていて、根元側指要素4a以外の各指要素4b〜4dはそれよりも一段根元側の各指要素4a〜4cに折り畳み格納可能な構造となっている。
(もっと読む)
マスタ・スレーブ式マニピュレータシステム及びその操作入力装置
【課題】マスタ・スレーブ式マニピュレータシステムにおいて、操作入力装置にモータを用いることなく障害物や動作範囲の制限を力覚的に提示することが可能で、信頼性に優れ小型で操作性の良いものとすること。
【解決手段】マスタ・スレーブ式マニピュレータシステムは、アームを有するマニピュレータ110、130と、マニピュレータ130のアームを動かす操作入力装置190と、マニピュレータ110、130及び操作入力装置190を制御するコントローラ145、150とを備える。操作入力装置190はその関節に動力伝達の切断と動力伝達を接続してその動力伝達接続方向を選択可能な動作方向制限切替機構を備える。
(もっと読む)
搬送用ロボットのハンド及びそのハンドを有する搬送用ロボット
【課題】 異なるサイズのワークに対応してハンド幅を調整することができるとともに小型化で軽量化された搬送用ロボットのハンド及びそのハンドを有してワークを搬送する搬送用ロボットを提供する。
【解決手段】 ワークPを載置する複数の載置部2a、2bを有する搬送用ロボット100のハンド110(1)において、ハンド110(1)には、載置部2a、2bの間隔を調整する幅調整手段9,10、11と、幅調整手段9、10、11に、ハンド100(1)とは独立の駆動源の駆動力を伝達、遮断するクラッチ手段15とを有する。
(もっと読む)
ロボット機構
【課題】
外部から手動で動かすことができる受動状態と、動力でロボットを動かす能動状態とに切り換えられるようにする。
【解決手段】
第1クラッチ65によって、第1駆動系D1の駆動伝達経路を開放して、スライダ24のスライド移動及び第1リンク材42の回動運動が自由となる受動状態とすれば、人間の腕力等の外力よって、スライダ24、第1リンク材42及び第2リンク材46を動かすことができる。第1クラッチ65によって、第1駆動系D1の動力がスライダ24及び第1リンク材42に伝達される能動状態とすれば、第1モータ72によって、スライダ24、第1リンク材42及び第2リンク材46を動かし、作業を進めることができる。
(もっと読む)
多関節機構ならびにロボットハンド
【課題】耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
(もっと読む)
21 - 29 / 29
[ Back to top ]