
Fターム[3C007JU13]の内容
マニピュレータ、ロボット (46,145) | 教示装置、操作盤 (625) | 操作盤のタイプ (328) | 複数箇所で操作できるもの (11)
Fターム[3C007JU13]に分類される特許
1 - 11 / 11
ロボット制御システム
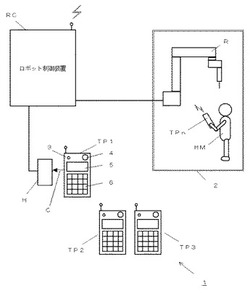
【課題】複数の可搬式操作装置を1台のロボット制御装置に同時接続した場合、教示機能が有効な可搬式操作装置を識別できない。
【解決手段】ロボット制御システム1は、ロボットRと、教示操作信号を送信する可搬式操作装置TPと、教示操作信号を受信してロボットRへの教示作業を行う教示機能を有する制御装置RCにより構成される。制御装置RCは、可搬式操作装置TPとの無線通信を確立する際に、可搬式操作装置TP毎に教示機能を有効化又は無効化する通信確立手段を備える。可搬式操作装置TPは、無線通信の確立状態を示す通信状態表示灯3と、教示機能の有効/無効を示す非常停止スイッチ4とを備える。通信確立の際に、現在の接続数が0の時に前記教示機能を有効化し、1以上の時は無効化したモニタモードを選択する。可搬式操作装置TPの接続形態が表示されるので教示に使用できる装置を容易に判別できる。
(もっと読む)
ロボットコントロール装置、ロボットコントロール方法

【課題】CPUが動作制御装置を単独で制御する用途、および、CPUを備えず動作指示装置からの指示に基づきロボットの動作制御する用途の両方の使い方を可能にするロボットコントロール装置、ロボットコントロール方法を提供することを課題とする。
【解決手段】ロボットコントロール装置1は、動作指示装置2と動作制御装置3とを備えている。動作制御装置3は、ロボット4が信号線5を介して接続されている。動作制御装置3は、通信ユニット300と動作制御ユニット400を備え、通信ユニット300と動作制御ユニット400とは、BUS端子302とBUS端子401を用いて接続され、通信ユニット300は、通信部301と、BUS端子302とを備え、動作制御ユニット400は、BUS端子401と、拡張ユニット判別部402と、実行部403と、第1記憶部404と、第2記憶部405と、ロボット制御部406とを備えている。
(もっと読む)
ロボットシステム
【課題】カメラをハンドに内蔵しながらも、より広範囲にある物品を検出して把持することができるロボットシステムを提供する。
【解決手段】物品を把持するハンドと、ハンドを回転駆動させるアームと、ロボットの動作を制御するコントローラと、ハンドに内蔵され、アームにより回転されるハンドの回転軸に対して撮像方向がオフセットするように配設されたカメラと、カメラにより取得された画像情報を処理してコントローラに信号を送信する画像処理装置と、を有して構成する。
(もっと読む)
外部操作ハンドガイド装置とその制御方法
【課題】装置の可動範囲内で組付作業を完了することができる外部操作ハンドガイド装置とその制御方法を提供する。
【解決手段】ワーク3を把持するワーク把持装置12と、ワーク把持装置を有する細長いハンド14と、ハンドの末端部を片持ち支持し末端部を所定のロボットエリア内で移動可能なロボット16と、ハンドの先端部に設けられロボットの作動を操作するオンハンド操作盤18と、ロボットを制御するロボット制御装置20とを備える。ロボットエリアと組立ラインの間に、ハンド14が移動可能な作業エリアとハンドが侵入できない安全エリアとが隣接して設けられ、オンハンド操作盤18は、作業対象物にワークを組付ける際に、作業エリア内に位置するように設定されている。ロボット制御装置20は、ロボット16を自動制御する自動モードと、ロボット16をオンハンド操作盤18により手動制御する協働モードとを有している。
(もっと読む)
ロボット装置及びその操作方法
【課題】操作性を向上させつつ誤操作を確実に防止できるロボット装置及びその操作方法を提供すること。
【解決手段】ロボット装置10は、操作情報を入力するための操作部25と、操作部25の着脱が可能な複数の操作着脱部12a、24a、24bと、を備えている。また、ロボット装置10は、台車部1と、台車部1の車輪を駆動する車輪駆動部と、台車部1に連結されたアーム部2と、アーム部2を駆動するアーム駆動部と、操作部25から操作着脱部12a、24a、24bを介して入力される操作情報に基づいて、車輪駆動部及びアーム駆動部を制御する制御部17と、アーム部2に取付けられ、人を保持する保持具3と、を更に備えていてもよい。
(もっと読む)
安全制御方法および安全制御システム
【課題】 操作者の負担を軽減して安全制御システムの安全性をさらに向上させる。
【解決手段】 ワイヤレスティーチングペンダント2(21〜24)に設けられ、当該ペンダント2のID番号をロボット3のコントローラ4に送信するためのRFIC225と、コントローラ4に設けられ、ペンダント2から送信されたID番号を受信するためのRFIC405と、ペンダント2がペンダントホルダ6から取り出されたことを検知する安全スイッチ部62と、安全スイッチ部62による検知時にロボット3をメンテナンスモードに移行させ、操作可能エリア10に配置されかつコントローラ4により受信されたID番号を有するペンダント2の当該ID番号を登録リストに登録するとともに、エリア10の外に移動したペンダント2のID番号を登録リストから消去し、登録リストに登録されたID番号のペンダント2のみをイネーブル状態にするコントローラ4とを設ける。
(もっと読む)
成形品取出機
【課題】 ティーチング等の手動操作が行いやすいコントローラを備え、しかも、成形品取出機本体の制御部を複雑化しなくてすむ成形品取出機を提供する。
【解決手段】 成形品取出機1は、成形品取出機本体3と主コントローラ5と副コントローラ7を備えている。副コントローラ7は、主コントローラ5の下位に存在しており、副コントローラ7からの設定は主コントローラ5を経由して伝達される。作業者は、使用用途に応じて主コントローラ5又は副コントローラのいずれを操作するかを決定することができる。
(もっと読む)
マニピュレータおよびそれを複数備えたパワーアシスト装置
【課題】マニピュレータおよびそれを複数備えたパワーアシスト装置において、操作性の向上を図る。
【解決手段】パワーアシストアーム1は、動作部としての直動関節5と、回転関節6と、ハンド部8とを備えている。また、パワーアシストアーム1は、各動作部を操作する第1操作部11および第2操作部12と、直動関節5を駆動する直動関節駆動装置と、回転関節6を駆動する回転関節駆動装置と、ハンド部8を駆動するハンド部駆動装置とを備えている。第1操作部11はハンド部8から離れた位置にあり、第2操作部12はハンド部8に近接した位置に設置されている。パワーアシストアーム1は、直動関節5、回転関節6およびハンド部8の力覚を第1操作部11に提示する直動関節力覚提示装置、回転関節力覚提示装置およびハンド部力覚提示装置を備えている。
(もっと読む)
信号通信システム
【課題】娯楽装置と同様に患者のリハビリテーション運動のためのプラットフォームを提供する。
【解決手段】ロボット装置のアクチュエータと通信する動作センサであって、人間に取り付けられており、この人間の動作を測定する動作センサを具え、前記動作センサが電源と送受信機と通信し、前記送受信機が前記ロボット装置の中央処理ユニットと通信し、前記中央処理ユニットがセンサ信号を受信して処理し、前記センサが検出した入力を前記アクチュエータに通信し、前記人間による位置、速度、加速度および力の入力を検出し、前記ロボット装置の動きを前記人間の測定した動作に対応させる。
(もっと読む)
操作訓練装置
【構成】ロボット20は、教師側ジョイスティック12bの操作に対応する動きを示す。かかるロボット20のリアルタイム画像は、生徒ST用のモニタ14c上の或るウィンドウに表示される。教師側ジョイスティック12bの姿勢と生徒側ジョイスティック14bの姿勢とを示すガイド情報は、ロボット20のリアルタイム画像の表示処理に関連して、モニタ14c上の別のウィンドウに表示される。生徒STの習熟度は、教師側ジョイスティック12bおよび生徒側ジョイスティック14bの姿勢の相違に基づいて算出される。算出された習熟度Mは、モニタ14cに表示されるとともに、教師TC側の通信端末12に向けて送信される。
【効果】生徒の操作能力を客観的かつ正確に評価することができる。
(もっと読む)
産業用ロボットシステム
【課題】 ティーチペンダントを複数の制御装置で共用する場合、ティーチペンダントを作業者の意図する制御装置若しくはマニピュレータに確実に接続させることのできる安全性の高い産業用ロボットシステムを提供する。
【解決手段】 産業用ロボットシステム1は、マニピュレータM1〜M3がそれぞれ接続された複数台の制御装置C1〜C3と共通のティーチペンダントTPによって構成される。各マニピュレータM1〜M3には表示灯L1〜L3が設けられている。ティーチペンダントTPが制御装置C1〜C3のうち、例えば制御装置C1に接続されると、それに接続されたマニピュレータM1の表示灯L1が点灯される。作業者はこの表示灯L1の点灯によりティーチペンダントTPが制御装置C1〜C3のうち、意図した制御装置C1に接続されたかを容易に確認できる。
(もっと読む)
1 - 11 / 11
[ Back to top ]