
Fターム[3C007KS07]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001) | 作業対象物の状態 (971) | 形状 (79)
Fターム[3C007KS07]に分類される特許
1 - 20 / 79
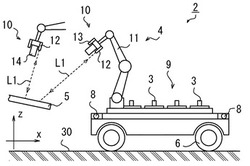
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
操作環境モデル構築システム、および操作環境モデル構築方法

【課題】作業ロボットの導入環境のモデル化負担を低減すること。
【解決手段】操作環境モデル構築システム100は、被操作体の計測により得られる立体像に対して幾何プリミティブを適応させて被操作体の幾何的特性を示す幾何情報を生成し、幾何情報の生成対象である被操作体の空間位置を示す位置情報を取得し、被操作体に対して作業ロボットにより行われるべき操作内容を示す操作情報を、生成された幾何情報及び取得された位置情報に対して関連付けて記憶する。被操作体に対して操作タグを仮想的に設定することができ、作業ロボットの導入環境のモデル化負担の低減を図ることができる。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
ロボットの駆動装置、ロボットの駆動方法、およびロボット
【課題】多関節の指部を備えたロボットを簡単な制御で駆動する。
【解決手段】対向して設けられた複数本の指部を用いて対象物を把持するに先立って、複
数の関節を備えた指部の形状を、対象物に応じて定められた把持形状に変形しておく。そ
して、指部の形状を把持形状に保持したまま、対向して設けられた複数本の指部を用いて
、対象物を把持する動作を行う。こうすれば、対象物が変更された場合でも、新たな対象
物に応じた把持形状に指部を変形させるだけで、迅速に且つ適切に対象物を把持すること
ができる。しかも把持動作は、グリッパー型のロボットと同様に簡単な制御で実現するこ
とが可能となる。
(もっと読む)
ロボット装置
【課題】把持対象物の把持状態を維持することが可能な把持形態を選択することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられた多指ハンド部20と、視覚センサ30による検出により、把持対象物110の位置情報および形状情報を取得する画像処理部43と、把持対象物110の位置情報および形状情報に基づいて多指ハンド部20による把持形態の候補を複数抽出するとともに、抽出された複数の把持形態の候補についての多指ハンド部20の関節トルクに基づいて、抽出された複数の把持形態の候補の中から1つの把持形態を選択する制御装置40とを備える。
(もっと読む)
ロボットの作業プログラム作成方法、ロボットの作業プログラム作成装置、及びロボット制御システム
【課題】位置及び姿勢の教示を厳密に行わなければならず、教示作業に非常に労力を要する。
【解決手段】教示モードでは、ラフ教示点であるセンシング点においてセンシング命令が入力される(S22)。この命令とセンシング点を記憶する(S23)。狙い角・前進後退角が入力される(S24)。センシングモードでは、センシング点にロボットを移動させ(S32)、レーザセンサを検出動作させてワーク形状を取得し(S33)、位置及び姿勢を算出して作業プログラムを作成する(S35)。ワークに位置ずれが発生しない環境下において教示作業を大幅に簡略化できる。
(もっと読む)
レーザー加工表示装置及びこれを用いたロボットの教示方法
【課題】レーザー加工の教示作業を迅速に行うことができるレーザー加工表示装置及びこれに用いたロボットの教示方法を提供すること。
【解決手段】レーザー加工表示装置1は、ロボット7のエンドエフェクタ72に装着して加工用レーザー光Aを照射するレーザー加工手段2と、被加工対象8に測長用レーザー光Bを照射して、測長用レーザー光Bの出射位置311から被加工対象8までの距離を計測する測長手段31と、加工用レーザー光Aの出射位置231から被加工対象8における各部までの距離を算出し、被加工対象8の表面断面形状を特定する算出手段と、表面断面形状82を表示すると共に、表面断面形状における各部が加工用レーザー光Aの焦点距離の調整可能範囲T内に入るか否かを表示する表示手段を備えている。
(もっと読む)
ロボットシステム及びロボット装置並びにワーク取り出し方法
【課題】より精度良くワークをストッカから取り出してハンドリングすることができるようにした、ロボットシステム及びロボット装置並びにワークハンドリング方法を提供する。
【解決手段】複数のワークを収納したストッカ内のワークを保持する保持部を有するロボットと、制御装置と、形状センサと、ロボットによるワークの保持状態を検査する検査装置と、ワークを仮置きする仮置台と、を有し、検査装置によりワークの保持状態が合格であると判定されると、次工程へワークをハンドリングさせ、検査装置によりワークの保持状態が不合格であると判定されると、仮置台に保持したワークを載置して仮置台を形状センサで検出してワークの形状を検出して、再度、保持部によりワークを保持して次工程へワークをハンドリングさせる。
(もっと読む)
視覚に基づく3次元形状認識を備えたロボット
【課題】2次元(2D)の視覚信号から、対象物の3次元(3D)形状を認識する。
【解決手段】ビデオ信号において表される対象物について、3D形状の情報を抽出するため、ビデオセンサからの該ビデオ信号を処理するための方法であって、対象物が、3D形状空間において格納されるメモリを提供するステップであって、該形状空間は、該対象物の3D形状の特性をコード化する抽象特徴空間である、ステップと、対象物の2Dのビデオ信号の表現を、前記形状空間にマッピングするステップであって、該形状空間における対象物の座標は、該対象物の3D形状および(または)物理的特性を示す、ステップと、を含む。
(もっと読む)
衣料折り畳みシステム、衣料折り畳み指示装置
【課題】衣料の折り畳み手順を簡単な方法でロボットに指示するための技術を提供する。
【解決手段】システム3が、ステージ上に配置された折り畳み前の衣料の画像を撮像装置1から取り込み、取り込んだ画像から衣料の形状を認識して、形状データを生成する。システム3は、形状データに基づき生成したモデル化された衣料をグラフィカルエディタに表示し、そのモデル化された衣料をポインティングデバイスの操作でユーザに折り畳ませる。折り畳み手順の入力が終わると、システム3が、入力された折り畳み手順に基づいて、ステージ4上の衣料60を実際に折り畳むためロボット2の移動機構20及びハンド21に実行させるべき動作を計算し、ロボット2に対して制御命令を送出する。
(もっと読む)
ロボットの制御方法
【課題】ワークの状態に応じてロボットの挙動を精度良く制御する方法を提供する。
【解決手段】ワークを移動するロボットの制御方法にかかわる。手部にワークを把持させてロボットを駆動するときの手部の挙動を検出し、複数種類のワークを移動するときのロボットの挙動に関する情報を記憶する学習工程と、ワークの属性を検出する属性検出工程と、ワークの属性と挙動の情報とを用いてロボットの制御条件を設定する制御条件設定工程と、ロボットがワークを移動する移動工程と、を有する。
(もっと読む)
ロボットの制御装置
【課題】
作業ツールが作業中にレーザセンサを利用する倣い有効区間と作業ツールが作業中にレーザセンサを利用しない倣い無効区間において、倣い有効区間では位置姿勢制御を行い、倣い無効区間では教示姿勢となるように姿勢制御の切替えができるロボットの制御装置を提供する。
【解決手段】
溶接ロボットの制御装置はワークの形状を認識するレーザセンサを備える。レーザセンサを利用する倣い有効区間では、センサの検出結果に基づく目標位置姿勢に基づいて位置姿勢倣い制御を行うロボット制御部RCを備える。ロボット制御部RCは、倣い有効区間に隣接する前記センサを利用しない倣い無効区間では、倣い無効区間の教示点における教示データに含まれる教示姿勢となるようにロボットの姿勢制御を行うとともに、倣い有効区間の終了点の実位置と、前記目標位置姿勢の位置との差に基づいて位置制御を行う第1位置姿勢制御を行う。
(もっと読む)
物体認識方法
【課題】精度良くワークの位置を検出する方法を提供する。
【解決手段】第1パターンが形成された容器上に第1パターンの内側を目標にして四角板を配置するワーク配置工程と、第1パターンと四角板とを撮像して画像データ47を取得する撮像工程と、画像データ47における第1パターン像49と四角板像48との相対位置を分析して四角板の姿勢を認識するワーク認識工程と、を有する。そして、第1パターンは四角板の外形形状を囲むパターンに形成されている。
(もっと読む)
ロボット、ロボットハンド及びロボットハンドの制御方法
【課題】 把持しようとする物体の形状及び材質に関係なく、より迅速かつ正確に物体に接近し、安全に物体を把持することができるロボット、ロボットハンド及びロボットハンドの制御方法を提供する。
【解決手段】 手の平と、複数の節を備えて前記手の平に連結される複数の指とを備えるロボットハンドの制御方法において、前記手の平に設置される第1距離センサーを用いて前記手の平を物体に接近させ、前記複数の指に設置される第2距離センサーを用いて前記複数の指を前記物体に接近させ、前記手の平及び前記複数の指を前記物体に接触させて前記物体を把持するロボットハンドの制御方法を構成する。
(もっと読む)
3次元形状の計測方法および装置
【課題】可変シート状物品等のワークに対して行う作業を自動化するために、その3次元形状を高速かつ高分解能に取得すること。
【解決手段】ステレオカメラの撮像領域に配置されたワークにパターンを投影し、ステレオカメラによりワークのパターン付きステレオ画像を取得し、ステレオ画像処理することによりワークの3次元形状を計測する方法であって、前記投影パターンは、前記ワークのパターン付きステレオ画像の対応付けを行うための第1のパターンと、ワークの3次元形状を計測するための第2のパターンとを備えることを特徴とする3次元形状の計測方法およびその装置。
(もっと読む)
ロボットハンド及びロボットハンドの制御方法
【課題】各リンク間の連動動作の重要性を考慮し、つかみ動作のタイプに応じて要求される最適な連動動作により対象物を上手につかむことができるロボットハンド及びその制御方法を提供すること。
【解決手段】ロボットハンド1は、掌部11と、2以上のリンク121、122及び131、132を有する2以上の指部12、13と、各リンクを個別に駆動する各リンクにそれぞれ設けられた関節123、124及び133、134を独立に制御するモータ111〜114と、把持対象物の把持方法に対応して各関節の連動動作が定義されたデータベースと、データベースを参照してモータ111〜114を制御する制御手段とを有し、制御手段は、複数の連動動作から、把持対象物に応じた一の連動動作を選択してモータ111〜114を制御する。
(もっと読む)
ロボットビジョンシステム
【課題】視覚機能を付与したロボットシステムとして、小規模化が可能なシステム構成でありながら、撮像した画像データに基づく柔軟で精度の高い位置決め等の制御を行なうことのできるロボットビジョンシステムを提供する。
【解決手段】ロボットビジョンシステム1を構成するロボット10は、その先端に設けられてワークWに対する所定の処理を行う機能部Tを有している。一方、スマートカメラ12は、ワークWを含むロボット10の周辺画像Imを撮像しつつこの撮像した画像を逐次データ処理してロボット10の動作に必要とされる処理情報を出力する。そして、ロボットコントローラ11は、ロボット10の動作を制御する制御プログラムを有し、この制御プログラムと前記スマートカメラ12から出力される処理情報とに基づき機能部Tの位置決めを含めてロボット10の動作を制御する。
(もっと読む)
マニピュレータシステムおよびその制御方法
【課題】ロボットアームとロボットハンドを備えたマニピュレータの制御方法において、
対象物を把持して作業動作に入った際にアームの可動範囲を越えたり、アームが特異点に陥ったりすることなく動作可能なハンドの把持形態を選択する。
【解決手段】ロボットハンドに多指ハンドを採用することで把持形態を複数提供し、提供された複数の把持形態と把持対象物の位置からこれを把持および把持後のアームの移動経路における関節姿勢を各々計算し、各々の関節姿勢の取り易さを評価する処理を行い、この評価結果に基づいて把持形態を選択する。
(もっと読む)
小型生産設備
【課題】作業対象に対してその位置や姿勢を正確に認識して作業を行う。
【解決手段】ワークWの把持等の作業を行う小型生産設備1は、ワークWを所定の状態に保持するステージ3と、ワークWの把持等を行う第1マニピュレータ4と、第1マニピュレータ4に取付けられた第1エンドエフェクタ6と、第1エンドエフェクタ6に取付けられた第1カメラ7と、第1カメラ7の画像に基づいてワークWの姿勢等を認識する認識手段と、認識結果に基づいてワークWの姿勢等を制御する制御手段とを備え、第1カメラ7は、把持されたワークWの幅方向の端部を撮像視野に含み、かつ幅方向の端部及びワークW前方の所定の範囲を被写界深度に含むように設定されており、認識手段は、第1カメラ7が取得した画像に基づいて、ワークW及び作業対象ワークの姿勢等を認識し、制御手段は、認識結果に基づいてワークWの調整量を決定する。
(もっと読む)
位置教示方法、位置教示プログラムおよび位置教示装置
【課題】 本発明は、装置の基板ホルダに円板状の基板を装着するロボットに対する位置教示に関し、より詳細には基板ホルダが確実に保持できる位置に基板を供給する位置教示方法、位置教示プログラムおよび位置教示装置に関する。
【解決手段】 本発明の位置教示方法は、複数の基板ホルダを備える装置において、基板を支持する爪で支持する基板ホルダに基板を装着するロボットに対する位置教示方法であり、ロボットに基板をキーボードへの供給位置まで搬送させ、基板の中心位置を第1の位置情報として取得する第1位置取得手順と、供給位置から基板ホルダに装着した後の基板の中心位置を第2の位置情報として取得する第2位置取得手順と、第1第2の位置情報との差分である偏差を求める偏差算出手順と、複数の偏差の中から所定の算出方法で偏差を代表する代表偏差を求める代表偏差算出手順と、代表偏差を基に教示位置を求め、ロボットに教示する教示手順とで構成する。
(もっと読む)
1 - 20 / 79
[ Back to top ]