
Fターム[3C007KX06]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | 手首に設けるもの (212)
Fターム[3C007KX06]に分類される特許
1 - 20 / 212
ロボット制御装置、ロボット制御方法、およびプログラム
【課題】曖昧な命令をロボットに入力しても、ロボットに動作を行わせることができず汎用性のあるロボット制御装置、ロボット制御方法、およびプログラムを提供すること。
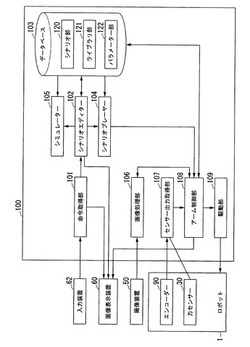
【解決手段】シナリオとサブシナリオとが対応付けられて登録されているデータベース103と、入力装置62から入力された命令を取得する命令取得部101と、命令取得部が取得した命令に対応するサブシナリオをデータベースから読み出して、サブシナリオに基づいてロボット1を制御する制御コマンドを生成する制御コマンド生成部104とを備え、制御コマンド生成部は、命令取得部が取得した命令を実行するのに必要な要素に未取得の要素がある場合、ロボットに未取得の要素を取得させる命令を抽出してロボットに送信し、ロボットが取得した要素をサブシナリオに組み込んでロボットを制御する制御コマンドを生成する。
(もっと読む)
加工ロボットの軌道追従装置と方法

【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの追従遅れなしに、高精度の加工をすることができる加工ロボットの軌道追従装置と方法を提供する。
【解決手段】(A)ワークのCADモデルから軌道データを生成して記憶装置に記憶し、(B)加工前に、軌道データに沿って、加工速度より低速の倣い速度で、ワークを加工することなくワークを倣い、その動作位置から軌道データを修正して目標軌道を設定し、(C)次いで、目標軌道に基づき、ワークと接触させることなく加工速度で加工工具を位置制御して、軌道データを再修正する学習を繰返して加工に使用する目標軌道データとして記憶し、(D)加工時に、学習後の軌道データに基づき、加工速度で加工工具を位置制御してワークを加工する。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラム
【課題】汎用性の高いねじ締めを行えるロボット、ロボット制御装置、ロボット制御方法、ロボット制御プログラムを提供する。
【解決手段】ドライバービット51の先端の係合部52が磁化されているドライバー50を把持するアーム部20と、アーム部20を制御する制御部100とを備え、制御部100は、ドライバー50の係合部52を磁力により係合可能な頭部を有するねじ211の頭部頂面の溝に押しつけた状態で、ドライバー50の係合部52にねじ211の頭部頂面の溝が嵌合した状態で磁力により生じる吸着力よりも小さく、ドライバーの係合部52にねじ211の頭部頂面の溝が当接した状態で磁力により生じる吸着力よりも大きい慣性力がねじ211に作用する第1の所定の加速度で、ねじ211が吸着されたドライバー50を移動させる。
(もっと読む)
力センサの出力に基づいてロボットのダイレクトティーチをおこなうロボット教示装置
【課題】スイッチなどを用いることなしに、操作感を簡易に変更する。
【解決手段】ロボット教示装置(10)は、少なくとも1軸方向の力と、該1軸に直交、かつ、互いに直交する2軸方向の夫々の軸回りのモーメントを検出する力検出部3と、ロボット1を移動させるときに基準とする移動基準座標系を設定する移動基準座標系設定部21と、ロボットを移動基準座標系の原点回りに回転移動させるか、前記移動基準座標系を基準にして並進移動させるかのいずれかの移動方法を設定する移動方法設定部22と、1軸方向の力と、2軸方向の夫々の軸回りのモーメントと、所定の作用基準点の位置とに基づいて、作用基準点における仮想力を算出する仮想力算出部23と、移動基準座標系と移動方法と仮想力とに基づいて、ロボットに対する力制御作用力を算出する力制御作用力算出部24と、力制御作用力に基づいて力制御をおこなう力制御部25とを含む。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
粗倣い制御を行うロボットの制御装置
【課題】形状が未知の部分や障害物等がワークに存在する場合でも、ロボット、作業ツール及びワークに対して過大な負荷をかけることなく、なるべくワークの形状に沿った迅速な倣い制御を可能とするロボット制御装置の提供。
【解決手段】ロボット制御装置14は、ツールとワークとの間に作用する力を検出する力検出手段16と、ロボット12の動作切り替えの判定及びパラメータ調整を行う動作切り替え判定・動作パラメータ調整部34と、動作切り替え判定・動作パラメータ調整部34による動作指令に基づいて、ロボット12に送る指令を演算する指令演算部36とを有する。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
ロボット
【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
3軸力センサを用いて力制御をおこなうロボットの制御装置
【課題】3軸力センサによっては検出できない力およびモーメントを推定する。
【解決手段】ツール(4)およびワーク(W)の一方に対して他方をロボット(1)の手先部によって相対的に移動させ、ツールとワークとの間に作用する力を制御するロボット制御装置(11)は、1軸方向の力と、該1軸に直交で且つ互いに直交する2軸方向の軸回りのモーメントとを検出する力検出部(3)と、ツール(4)とワーク(W)との間に作用する力を推定するための力推定用点を設定する力推定用点設定部(12)と、力検出部により検出した1軸方向の力および2軸方向の軸回りのモーメントと、力推定用点設定部により設定された力推定用点の位置とに基づいて、前記2軸方向の力またはさらに前記1軸回りのモーメントととを推定する力推定部(13)と、を備える。
(もっと読む)
組立ロボットとその制御方法
【課題】単一のワークを複数の動作で対象物に組み付ける際に、各動作における条件の変化を考慮して、各動作においてその成功又は失敗を逐次判定することができる組立ロボットとその制御方法を提供する。
【解決手段】単一のワーク1を複数の動作で対象物2に組み付ける組立ロボット10であって、外力を計測する力センサ14を有しワークを把持するロボットハンド12と、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアーム16と、各動作におけるワークの動作条件を記憶しロボットアームを制御するロボット制御装置20とを備える。ロボット制御装置20により、各動作において、ワーク1の位置と計測された外力を動作条件と照合し、各動作の成功又は失敗を判断する。
(もっと読む)
加工ロボット及びその重力補償方法
【課題】重力補償の精度を高め、かつ、計測動作時において工具とワークとの衝突を避け、さらに、計測時間を短縮することを可能とした加工ロボット及びその重力補償方法を提供する。
【解決手段】外力を計測する力センサ15を備えた工具12を用い、加工中に工具12に作用する加工反力を計測しながらワーク1を加工する加工ロボット10の重力補償方法であって、加工軌道をCAMによって生成し、ワーク1の加工前に、加工軌道と干渉しない範囲で準備した計測軌道において、工具12を加工時の姿勢で動作させ、その際の力センサ15の計測値をオフセット値として記憶し、ワーク加工時に、加工軌道上の同一の姿勢におけるオフセット値を、加工中の力センサ15の計測値から差し引いて、加工反力を算出し、加工反力を用いて、工具12の押付力を制御しながらワーク1に倣って加工する。
(もっと読む)
組立ロボットとその制御方法
【課題】画像センサを用いずに、ワークと中間部材の嵌合状態を判断することができる組立ロボットとその制御方法を提供する。
【解決手段】外力を計測する力センサを有しワークを把持するロボットハンドと(S1)、ロボットハンドを3次元空間内で位置と姿勢を移動可能なロボットアームと、ロボットアームを制御しワークに嵌合された中間部材を対象物に嵌合させる組立作業を実行するロボット制御装置とを備える(S2)。ロボット制御装置により、組立作業中のワークの位置と計測された外力から組立作業の成功又は失敗を判断し(S3)、組立作業が失敗であるときに、ワークを組立作業前の位置へ戻し(S4)、次いで、中間部材が嵌合不能な固定部材5に対して固定部材を仮想的に対象物とみなして組立作業を再実行し(S5)、再実行中のワークの位置と計測された外力からワークと中間部材の嵌合状態を判断する(S6)。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
ロボットの校正装置および校正方法
【課題】ロボットの位置決め精度と同等の精度で作業対象とロボットとの校正を実行することができるとともに、校正作業を効率化させることができるロボットの校正装置および校正方法を得る。
【解決手段】ロボットと作業対象20との校正を実行するロボットの校正装置であって、ロボットハンド15と作業対象20との接触を判定する力覚センサ14と、ロボットハンド15と作業対象20との接触時におけるロボットの位置姿勢を取得する位置取得部と、位置取得部で取得された複数のロボットの位置姿勢に基づいて、作業対象20の姿勢をロボット座標系で算出する姿勢算出部と、姿勢算出部で算出された作業対象20の姿勢にロボットを移動させる駆動部と、駆動部により移動された複数のロボットの位置姿勢に基づいて、作業対象20の位置を算出する位置算出部とを備える。
(もっと読む)
産業用ロボットの速度位置解析システム及び産業用ロボットの速度位置検出装置
【課題】従来の産業用ロボットの速度位置解析システムは、ドリフト安定度の高い慣性センサからの慣性信号に基づいて産業用ロボットの位置等を検出するように構成しているので、高価な慣性センサが必要となり、部品コストの増大の要因になっている。
【解決手段】本発明による産業用ロボットの速度位置解析システムでは、移動制御部20は、産業用ロボット1を静止させているときにデータ蓄積部30に対して静止情報20aを入力する。データ蓄積部30は、静止情報20aを検出したときの慣性信号11aのデータに関連付けて静止情報20aを記憶する。速度位置後解析部31は、静止情報20aが関連付けられている慣性信号11aのデータに基づいて求められる産業用ロボット1の速度をゼロとする補正値を求めて、求めた補正値を用いて慣性信号11aのデータを補正して産業用ロボット1の速度及び位置を求める。
(もっと読む)
作業装置及び部品ピッキングシステム
【課題】マニプレータを用いた作業装置及び部品ピッキングシステムを提供する。
【解決手段】作業装置9は、マニプレータ11と、マニプレータ11の可動範囲内に配置された作業台17と、作業台17に載せられた部品の2次元画像を撮像する撮像装置100と、2次元画像から部品の位置を最適に検出できる程度に予め設定された分量だけ、作業台17に部品を供給する部品供給手段11と、マニプレータ11及び撮像装置100の動作を制御する制御システム150とを備える。
(もっと読む)
自動溶接システムにおける溶接方法および自動溶接システム
【課題】レーザセンサを溶接トーチの近傍に取り付けている為に定期的な保守作業が必要になり、生産性を低下させる。
【解決手段】レーザセンサLSで溶接部位Wsを検出して教示データを補正し、溶接トーチTにより加工する自動溶接システム1である。溶接ロボットMPは溶接トーチ又はレーザセンサのどちらかを取り付けるためのツール着脱機構を有する。溶接トーチを待避させるためのツールスタンド11およびレーザセンサを待避させるためのツールスタンド12を備える。まず、溶接トーチをツールスタンド11に待避させ、レーザセンサを取り付ける。次にレーザセンサを取付けた状態のときに作成した教示データを補正する。次にレーザセンサをツールスタンド12に待避させ、溶接トーチを取付ける。補正後の教示データを再生することにより溶接加工を行う。輻射熱やヒュームからレーザセンサを保護することができる。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
人間協調ロボットシステム
【課題】人間がロボットに接触しうる環境においても人間の安全を確保する。
【解決手段】ロボット(2)と人間(1)とが領域を共有して協調作業を行う人間協調ロボットシステムにおいて、ロボットの先端に取付けられた作業機器(3)に設置されるかまたはロボットに設置された力センサ(4)を具備し、力センサの検出値が所定の値を超えた場合には記ロボットを停止または力センサの検出値が小さくなるようにロボットの動作を制御するようになっており、ロボットは、人間から力センサの設置位置よりも遠位に位置する第一ロボット部位(6)と、力センサの設置位置よりも人間に対して近位に位置する第二ロボット部位(7)とを含んでおり、ロボットシステムは、ロボットが人間に最も接近した場合においても人間による第一ロボット部位への接触を防止するように人間の作業領域を制限する制限部(5)を具備する。
(もっと読む)
力制御ロボットのキャリブレーション装置と方法
【課題】ロボットの設置精度が低い場合でも、その設置誤差を考慮して、必要なパラメータをキャリブレーションすることができる力制御ロボットのキャリブレーション装置と方法を提供する。
【解決手段】3次元動作するロボットアーム1の手先に力センサ3を介してツール4が取り付けられている。ロボット制御装置14によりロボットアーム1を複数の姿勢に動作させて力センサ3の計測値と、前記計測値を取得するときの力センサの姿勢データとを取得し(S1,S2)、演算装置16によりツール重量、重力方向ベクトル、ツール重心位置ベクトルを含む複数のパラメータを算出する(S3,S4)。
(もっと読む)
1 - 20 / 212
[ Back to top ]