
Fターム[3C007LS06]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | 直接教示(オンライン・ティーチング) (244) | 特殊な教示方法(例;光、音等) (50)
Fターム[3C007LS06]に分類される特許
1 - 20 / 50
レーザ加工ロボットの教示方法及び教示装置
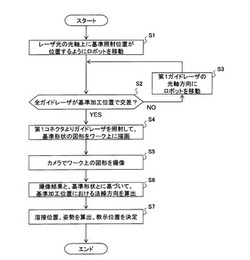
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
特徴点抽出装置及びこれを用いた動作教示装置、動作処理装置

【課題】外部出力装置に教示すべき特徴点を必要最小限に抑えて抽出する。
【解決手段】特徴点抽出装置3として、外部出力装置4の処理動作に伴う動作点の位置情報を予め決められた取込時間間隔毎に時系列で取り込む動作点取込手段5と、前記取込時間間隔よりも長い分割時間間隔dt毎に前記動作点取込手段5にて取り込まれた動作点に基づく動作軌跡を近似直線L(LAB、LBC)として演算する近似直線演算手段6と、この近似直線演算手段6にて演算された近似直線Lの取り込まれた動作点に対する近似精度を予め決められた許容範囲内に設定する近似精度設定手段7と、前記近似直線演算手段6にて演算された近似直線Lの近似精度が前記許容範囲内であるときに、前記近似直線Lを特定する変化点を外部出力装置4に教示すべき特徴点として抽出する特徴点抽出手段8とを備える。これを用いた動作教示装置、動作処理装置をも対象とする。
(もっと読む)
ロボット装置及びロボット装置による情報提供方法
【課題】認識されたユーザーに応じて周辺環境に関する情報を適切に提供することが可能なロボット装置及びロボット装置による情報提供方法を提供する。
【解決手段】移動部と、移動しながら外部の環境を認識する外部環境認識部と、環境に基づいて環境地図を生成する環境地図生成部と、情報提供する地点を環境地図内に指定する情報提供地点指定部と、情報提供の対象とする複数のユーザーを登録し、情報提供する地点毎に情報提供するユーザーを設定するユーザー管理部と、環境からユーザーを認識する人物認識部と、ユーザーの行動を認識する行動認識部と、ユーザーの行動に基づいてユーザーの将来の行動を予測する予測部と、情報提供する地点とユーザーの将来の行動との関係に基づいて情報提供する情報提供部とを備える。
(もっと読む)
ロボット制御装置
【課題】認識対象物の3次元認識の結果に基づいて、自動的に認識対象物に対してロボットのハンドによる作業を行わせるためのロボット制御装置を提供する。
【解決手段】 認識対象物5及びハンド3の形状をシミュレーション手段10へ入力して、認識対象物5を把持する際のモデル座標系におけるハンド3及び認識対象物5を離す際のロボットベース座標系における認識対象物5の位置・姿勢を定義し、センサ座標系における認識対象物5の位置・姿勢を求め、これらの情報に基づいて、ハンドが認識対象物5を把持する際のロボットベース座標におけるハンド3の位置・姿勢及び認識対象物5を離す際のロボットベース座標系におけるハンド3の位置・姿勢を求め、この求めたハンド3の位置・姿勢を引数として与えた制御プログラムをロボット2に出力することにより、ロボット2を制御して認識対象物5に対してハンド3による作業を行わせる。
(もっと読む)
相関分析システム
【課題】複数の時系列データ間の相関関係の推定精度の向上を図ることができるシステムを提供する。
【解決手段】本発明の相関分析システム100によれば、一の対象から取得された複数の状態軌道の状態空間における分布態様に応じて、当該複数の状態軌道が分類される。状態軌道において特異な形状特性を示す特異点のうち、状態空間における位置および形状因子が近似する特異点群がクラスタリングされることによりクラスタが生成される。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
ロボットの動作を制御する方法およびロボットシステム
【課題】ロボットの動作を制御する方法およびロボットシステムにおいて、人間の手とは異なる構造を有するロボットに対し、人間の手のようなリアルタイムの動作の制御を行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示情報取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手指の関節および指先の位置を表す手指座標を決定し(手指座標決定ステップ、ステップS3)、この手指座標に基づいて、ロボットハンドの各関節の角度を算出する(ロボットハンド関節角度算出ステップ、ステップS4)。
(もっと読む)
料理プロセス指示装置及び料理プロセス指示方法
【課題】料理タスクを実行するロボットに対して料理プロセスを簡単な方法で指示することが可能な技術を提供する。
【解決手段】少なくとも材料の投入、材料の混ぜ又は返し、及び、材料の加熱を含む、複数の料理タスクを実行するロボットに対して、料理プロセスを指示するための料理プロセス指示装置であって、前記各料理タスクに対応するアイコンと、前記アイコンを並べるための時間軸と、を表示し、ユーザにポインティングデバイスの操作で前記アイコンを前記時間軸上に並べさせる料理プロセス入力部と、前記料理プロセス入力部において前記時間軸上に並べられた前記アイコンの種類及び位置に基づいて、前記ロボットに該並べられたアイコンに対応する料理タスクを実行させる順番及びタイミングと前記ロボットに該料理タスクを実行させるための動作とを計算し、前記ロボットに対して制御命令を送出する制御部と、を備える。
(もっと読む)
経路計画生成装置および該方法ならびにロボット制御装置およびロボットシステム
【課題】本発明は、コミュニケーションにより生じた動作の遷移をスムーズに行う経路計画を生成し得る経路計画生成装置、該方法、ロボット制御装置およびロボットシステムを提供する。
【解決手段】本発明の経路計画作成部22は、複数のモーションデータを記憶するモーションデータ記憶部31と、動作の遷移の必要が生じた場合に、各モーションデータについて実行中の一の動作での所定の第1姿勢と他の動作での所定の第2姿勢との距離を求める距離演算部32と、第1閾値以下の前記距離を与える他の動作のモーションデータを選択する遷移先選択部33と、第1姿勢までのデータと第2姿勢以降のデータとを連結して新たな経路計画のデータを生成する経路計画部34とを備え、経路計画部34は、第1および第2姿勢間の距離が第1閾値以下でこの第1閾値よりも小さい第2閾値以上である場合に第1および第2姿勢間の経路のデータを確率的ロードマップ法で生成する。
(もっと読む)
搬送ロボット及び自動教示方法
【課題】 予め定められた一方向にエンドエフェクタを移動させることで教示位置を教示可能な自動教示装置を提供する。
【解決手段】 半導体搬送ロボット1は、ハンド2と、第1及び第2光電センサ14,15と、制御部28とを有する。第1及び第2光電センサ14,15は、ハンド2に設けられ、互いに異なる方向に延びる光軸L4,L5を有する。制御部28は、予め定められた仮教示位置pcに向かってハンド2を移動させて第1及び第2光電センサ14,15により正教示位置prに配置される冶具31に立設されるピン32を夫々検出させ、検出したときのハンド2の位置である第1及び第2検出位置p1,p2に基づいて正教示位置prと仮教示位置pcとのズレ量Δr、Δθを演算して正教示位置prを求める。制御部28は、ピン32を検出させる際、光軸L4.L5が延びる方向と異なる方向にハンド2を移動させる。
(もっと読む)
透過型視線検出装置及び移動型ロボットシステム
【課題】透過型視線検出装置を用いた移動型ロボットの教示方法において、教示者の矯正すべき屈折異常にもかかわらず教示容易性を確保する。
【解決手段】透過型視線検出装置に任意の部位厚み可能な透明エラストマを具有し、教示者の視覚屈折異常を矯正して移動型ロボット教示を容易にする。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
ロボットハンドの位置補正方法、ロボットハンド、ロボット
【課題】良好にティーチングを実施することが可能なロボットハンドの位置補正方法、ロボットハンド、ロボットを提供する。
【解決手段】複数の関節とCCDカメラ313を有するロボットハンド300とを備えるロボットに対してワーク200に設定された目標位置を教示する際にロボットハンド300の位置を補正する方法であって、目標位置に挿入したブッシュ210に設けられた目標マークをCCDカメラ313により撮像して、当該撮像した目標マークとCCDカメラ313の撮像範囲の基準位置とから、ロボットハンド300と目標位置との相対的な位置ズレを認識する認識ステップと、認識した位置ズレが小さくなるようにロボットの関節の駆動を制御してロボットハンド300の位置を補正する第1の位置補正ステップと、を備える。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】光学的ポインタで、ロボットに実行させる作業の種類(ロボットに対して行う制御の種類)を指定できるロボット制御システムを提供する。
【解決手段】ロボットを制御するためのロボット制御システムを、レーザポインタ等の光学的ポインタによる指示点の移動軌跡の形状を検出し、検出した1つ以上の移動軌跡の形状に基づき、予め定められている複数種類の制御の中のいずれの制御の実行を光学的ポインタの操作者が指示しているかを判別し、操作者が指示していると判別した制御を実行するシステムとして構成しておく。
(もっと読む)
ロボットシステム
【課題】操作性に富んだ複数のロボットにたいする教示装置を提供すること。
【解決手段】ポータブル・プログラミング・ターミナル20は、上記制御ユニット14とデータ接続されている。手動ガイド・デバイス30は、ロボット1の可動構造部2およびエンド・エフェクタ13の少なくとも一方に対して、自身を連結する連結手段を備える。手動ガイド・デバイス30は、ポータブル・プログラミング・ターミナル20とのワイヤレス通信チャンネルをセットアップするワイヤレス通信手段を有し、当該ワイヤレス通信手段は、手動ガイド・デバイス30上の第1トランシーバー・モジュールと、ポータブル・プログラミング・ターミナル20上の第2トランシーバー・モジュールと、を備える。
(もっと読む)
教示治具によって教示する基板搬送用マニピュレータ
【課題】教示治具によって教示するマニピュレータにおいて、教示治具から導出される光ファイバやケーブルが周辺装置に干渉しないようにすること、またそれらのケーブルを適切に配線して教示精度を上げること。
【課題を解決するための手段】基板あるいは教示治具210を保持可能なハンド25と、ハンド25を支持するアーム部24とを備え、教示治具210を保持した状態のハンド25で検出対象物を検出して教示を行なう基板搬送用マニピュレータにおいて、アーム部24の先端に回転可能に支持され、ハンド25を固定するハンド基端部251にコネクタ接続部261を設け、教示治具210から導出された教示治具用信号伝達ケーブル211の端部に、コネクタ接続部261に接続可能なコネクタ26を設けた。
(もっと読む)
ロボットのダイレクトティーチ制御装置
【課題】作業者がロボットと直動外部軸との間で制御対象を簡単且つ迅速に切換えれるようにする。
【解決手段】マスターコントローラ16は、第1の閾値以上の大きさを持つ外力が第1の規定時間以内で消滅する信号波形を一定時間以内に2回にわたって判定すると、ロボット1及び直動外部軸11のうち現在の制御対象としている一方を制御対象外とすると共に現在の制御対象外としている他方を制御対象として切換え、第2の閾値以上の大きさを持つ外力が第2の規定時間以上にわたって継続する信号波形を判定すると、その第2の閾値以上の大きさを持つ外力が力学センサ10に付与されている期間において現在の制御対象に対してダイレクトティーチ制御を行う。
(もっと読む)
自律動作機器、自律動作機器制御システム、及び、自律動作機器制御方法、並びに、自律動作機器制御プログラム
【課題】機器がおかれた状態と発動する動作を対応付けるための制御プログラム、すなわち機器がおかれた状態と発動する動作を対応付けた自律動作するためのルール(以下、自律動作ルール)をプログラムベースで記述することは、プログラムする者の負荷が高く、また、プログラムスキルも要求される。
【解決手段】自律動作ルールに基づいて自律的に動作する自律動作機器において、所定の動作を指示された際に、前記自律動作機器の状態と前記指示された動作とを対応づけた自律動作ルールを生成する自律動作ルール生成手段を備える。
(もっと読む)
ロボット制御システム
【課題】可搬式操作部の制御手段が過負荷か否かの判定に応じてロボットを制御するロボット制御用の制御部が転送する画像データ量を動的に調整することにより、可搬式制御部の制御手段の過負荷状態を抑制することができるロボット制御システムを提供する。
【解決手段】
ロボット制御システム30はティーチペンダント10のCPU11の負荷率を測定するCPU負荷測定部118と、負荷率に基づいてCPU11の過負荷を判定するCPU負荷監視部119を備える。ロボット制御システム30はCPU負荷監視部119の過負荷判定に応じて、CPU11の液晶ディスプレイ17に対する表示制御を軽減するためにネットワーク通信機25から送信される画像データ量を減少させる画面監視部216及び圧縮展開部218を備える。
(もっと読む)
1 - 20 / 50
[ Back to top ]