
Fターム[3C007LT01]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 補間、経路制御 (138)
Fターム[3C007LT01]の下位に属するFターム
パルス分配によるもの (1)
特殊パターンによる補間 (16)
Fターム[3C007LT01]に分類される特許
1 - 20 / 121
ロボットの制御方法およびロボットの制御装置
【課題】動作時間を引き延ばすことなく、PTP動作を行う際に消費するエネルギーを低減する。
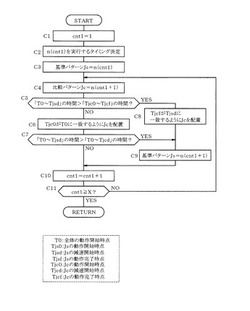
【解決手段】ロボットをPTP制御する際、各軸単位での動作時間が最も短くなるように各軸を駆動するための速度指令を演算する演算処理を実行し、それら演算された各速度指令を実行するタイミングを決定するタイミング決定処理を実行する。タイミング決定処理では、動作時間の長い速度指令から順に基準パターンに設定し、その基準パターンの減速が開始されるまでに、その次に動作時間の長い速度指令である比較パターンの減速が終了可能であるか否かが判断される。その判断の結果、基準パターンの減速開始までに比較パターンの減速が終了可能である場合、比較パターンの動作終了時点が基準パターンの減速開始時点に一致するように比較パターンを実行するタイミングを決定する。
(もっと読む)
ロボットの制御方法およびロボットの制御装置

【課題】動作時間を引き延ばすことなく、PTP動作を行う際に消費するエネルギーを低減する。
【解決手段】ロボットをPTP制御する際、各軸単位での動作時間が最も短くなるように各軸を駆動するための速度指令を演算する演算処理を実行し、それら演算された各速度指令を実行するタイミングを決定するタイミング決定処理を実行する。タイミング決定処理では、動作時間が最も長い速度指令から順に、その次に動作時間の長い速度指令との間において互いに減速動作が行われない減速余白期間が存在するか否かを判断し、減速余白期間が存在する場合且つその減速余白期間内に収まる減速期間を持つ速度指令が存在する場合、その速度指令における減速期間が減速余白期間内に収まるように、その速度指令を実行するタイミングを決定する。これにより、全体の動作時間を従来と同等にした上で、各速度指令における減速期間が分散化される。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】少ないノードで軌道計画の成功率を向上させることができる、ロボットの軌道計画システムを提供する。
【解決手段】本発明の一形態に係るロボットの軌道計画システム10は、グラフ構造データ格納手段に格納されているグラフ構造に対して、スタートノード及びゴールノードを追加し、さらに最終姿勢のハンドの周辺空間にノードを追加して、追加したノードと、隣接するノードとをエッジで接続し、スタートノードからゴールノードまでを結ぶ経路を探索するグラフ構造探索処理手段と、グラフ構造探索処理手段により探索された経路に含まれるノードが示す姿勢が、環境情報と干渉するか否かを判定し、干渉していると判定した場合には、ノードをグラフ構造から除外するノード有効性判定手段と、を備える。
(もっと読む)
ロボットの運動方法決定装置、ロボットの運動方法決定方法、及び、そのプログラム
【課題】対象ロボットの動力学モデルが不明な場合でも、最適な軌道を決定することが可能なロボットの運動方法決定装置を提供する。
【解決手段】本発明に係るロボットの運動方法決定装置100は、ロボットが第1の位置から第2の位置へ移動するように、ロボットが備える複数の駆動部を制御するための制御値の候補の組である制御値候補を決定し、決定した制御値候補をロボットに送信する実機制御部102と、制御値候補によって制御されている複数の駆動部の駆動状態を示す物理量である実測値を取得する実測値取得部104と、実測値から、実測値に対応する制御値候補の評価値を決定する評価部106と、評価値に基づいて、制御値候補を、ロボットの運動方法を決定するための制御値の組として採用するか否かを決定する制御値決定部108とを備える。
(もっと読む)
移動制御装置及び移動制御方法、並びにコンピューター・プログラム
【課題】マニピュレーターのリーチング動作や移動ロボットの移動など、自動機械の移動を好適に制御する。
【解決手段】自動機械の現在位置及び最終目標位置をパラメトリック曲線の端末とみなし、これら2点を結ぶパラメトリック曲線を内分比r:1−rで内分する内分点を、仮想バネ・ダンパ系の平衡点、すなわち仮目標位置として算出する。そして、この仮目標位置を2次のフィルターで鈍らせ、目標位置xdの生成を行なう。複雑な経路への追従制御が実現されるとともに、ベースとなるオンライン目標位置整形の特徴である対外乱適応能力を両立した移動制御器を構成できる。
(もっと読む)
動作制御方法、ロボット及びプログラム
【課題】動作制御方法、ロボット及びプログラムにおいて、比較的簡単な制御でロボット又はアニメーションキャラクタに円滑な動作、例えば人間からみて違和感のない自然な動作を行わせることを可能にすることを目的とする。
【解決手段】複数の可動部を有するロボット又はアニメーションキャラクタの動作が、動かす動作可動部で時系列に定義された動作パターンを、可動部間の動きの影響に応じて可動部同士をリンクで結んだグラフに基づいて更新し、更新された動作パターンに基づいて複数の可動部を制御し、前記更新は、グラフに基づいて動作可動部に加え、動作可動部に影響されて動作する従属可動部の動作を自動的に生成するように構成する。
(もっと読む)
ロボットの制御装置及びロボットの姿勢補間方法
【課題】ロボットの手先がワークを把持して加工を行う場合の作業精度を向上させる。
【解決手段】制御装置は、手先の先端点を座標原点とするX方向,Y方向,Z方向の各軸について、手先の位置及び姿勢をティーチングする場合に、座標原点から各軸方向の所定距離に手先の姿勢を定める姿勢点を設定すると、ティーチングした姿勢に対応する姿勢点の間について、各軸の姿勢点の移動軌跡がそれぞれ滑らかに繋がるように補間する。
(もっと読む)
ロボット制御装置
【課題】ロボットのハードウェア制限条件を考慮しながら、安定したビジュアルフィードバック制御を提供する。
【解決手段】カメラで撮影された画像から対象物の特徴を表す画像特徴量を算出する画像特徴量算出部105と、画像特徴量の変化と前記関節角の変化の割合である画像ヤコビアンを算出する画像ヤコビアン算出部107と、設定された目標値と前記画像特徴量とを用いて、ロボットの制御周期毎の画像上の目標軌道を生成する目標軌道生成部108とを備える。
(もっと読む)
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
円滑経路生成装置および円滑経路生成方法
【課題】動作経路から余分な動作を削減して円滑な動作経路を再生成する。
【解決手段】動作経路記憶手段と、経路途中点設定手段と、経路途中点記憶手段と、経路途中点のうち対となる一の経路途中点、および他の経路途中点からなる経路途中点対を採択する経路途中点対採択手段と、一の経路途中点と他の経路途中点との中間点を、計算式(一の経路途中点の位置データ+他の経路途中点の位置データ)/2から求める中間点演算手段と、中間点が障害物と干渉するかどうかを判断する中間点干渉チェック手段と、を備え、中間点が障害物と干渉する場合には、現在のままの動作経路を採択し(S7)、干渉しない場合には、当該中間点を新経路途中点として採択し、一の経路途中点から当該新経路途中点を通って他の経路途中点まで進む新動作経路に変更する円滑経路生成ステップを実行(S6)する円滑経路生成装置。
(もっと読む)
経路生成装置および経路生成方法
【課題】C空間における過剰な計算を排除して、動作経路計画工数を低減する。
【解決手段】初期位置記憶手段と、目標位置記憶手段と、現在位置検出手段と、経路記憶手段と、現在位置隣接コンフィギュレーション点を求める第1候補判断手段と、現在位置隣接コンフィギュレーション点のうち障害物との干渉点に隣接する干渉点隣接コンフィギュレーション点を求める第2候補判断手段と、現在位置隣接コンフィギュレーション点が干渉点であるかどうかを判断する干渉チェック手段と、現在位置隣接コンフィギュレーション点のうち現在位置から目標コンフィギュレーション点に近づくようにコンフィギュレーション点を選定する距離候補判断手段と、を備え、現在位置において前記距離候補判断手段により選定された距離候補コンフィギュレーション点が干渉点でない場合には、直進モード経路を生成し、干渉点である場合には境界追従モード経路を生成する。
(もっと読む)
ロボットの動作生成システム及び動作生成方法
【課題】達成させたい作業の動作を一度で確実に生成可能とし、短時間で動作生成を実行可能とする。また、軌道の計画可能性を保証しつつ、簡単な環境では短時間で軌道計画を可能とする。
【解決手段】複数のアームを備えるロボットの動作生成システムであり、アームの関節軸情報を示すノードと、当該ノード間を接続するエッジと、を有するグラフ構造をアームごとにグラフ構造データ格納部151に格納し、グラフ構造探索処理部154が、各アームに設定された優先度に従って、アームごとのグラフ構造を用いて、スタートノードからゴールノードまでを結ぶ経路を探索し、ノード有効性判定部155が、探索された経路に含まれるノード環境情報と干渉するか否かを判定し、干渉していると判定した場合には、当該ノードをグラフ構造から除外する。
(もっと読む)
ロボットシステムまたはロボット制御装置
【課題】冗長な自由度を有するマニピュレータをより最適に制御することができるようにしたロボットシステム及びロボット制御装置を提供する。
【解決手段】1以上のアクチュエータを有するマニピュレータ2とこれを制御するコントローラ3とを有し、コントローラ3は、アクチュエータの内の一部を冗長軸と設定し、マニピュレータの目標位置姿勢を設定し、マニピュレータが現在の姿勢から目標位置姿勢に達するまでの動作軌跡を生成し、マニピュレータの到達可能範囲内の領域を分割して設定した小領域と各小領域に対応する冗長軸角度用パラメータとを対応付けた冗長角度定義テーブル7を有し、冗長角度定義テーブル中の該当する小領域を選択し、選択結果に基づいて冗長軸角度を設定し、動作軌跡と冗長軸角度とに基づいて動作指令を生成する。
(もっと読む)
ロボットおよび補間方法
【課題】ロボットを構成する2つの制御ユニットA,Bにおいて、制御ユニットBが制御ユニットA上に設置されている場合に、両方の制御ユニットを同時に動かしながら、制御ユニットBの制御点に対して所望の補間動作ができるようにする。
【解決手段】制御ユニットBのユニットコントローラBに対して、制御ユニットAの制御点ACに対する指令Aも与える。ユニットコントローラBは、指令Aを制御周期ごとに補間計算し、制御ユニットBのユニット座標系Bにおける制御点BCの補間位置を計算することで、制御ユニットBのアクチュエータの補間位置を計算し、アクチュエータを制御するという手順で処理する。
(もっと読む)
移動装置の軌道情報生成装置
【課題】複数の軌道情報を独立して生成するにあたり、複数の軌道を結合した全体での移動時間が最短となるように各々の軌道情報を生成する新たな軌道情報生成装置を提供する。
【解決手段】所望の始点から終点まで移動装置を移動させるための軌道及び軌道上の速度に関する軌道情報を互いに異なる制約条件の下で生成する二つの軌道情報生成部を有し、これら軌道情報生成部で生成される二つの軌道情報のうち一方の軌道の終点と他方の軌道の始点とを一致させて結合点とし、結合点を介して両軌道を連結可能に各々の軌道情報を生成する装置である。結合点で取り得る複数の速度V0〜VMAX(移動に要する合計時間が最小となる速度Vsを含む)のうち、結合点における速度を制約条件の一つとして各々の軌道情報生成部で生成される各軌道情報に基づく移動に要する合計時間が最小となる速度Vsを繰り返し演算により算出する速度算出部を設けた。
(もっと読む)
ロボット制御装置
【課題】ロボットが一方の動作から他方の動作にスムースに移行することができるロボット制御装置を提供することを目的とする。
【解決手段】ロボットの連続した動作を切り換えるロボット制御装置30であって、前記動作に対応する複数のコントローラを備え、前記ロボットの状態が、切り換え後の動作における拘束条件から導出された不変集合に属すると、切り換え後の動作に対応する前記コントローラの初期状態を算出し、前記コントローラを動的に切り換えるものである。
(もっと読む)
冗長マニピュレータの冗長自由度の決定方法
【課題】冗長マニピュレータ1の手先8をCP制御にて変化させるに際し、アームアングルψの連続性を担保する技術を提供する。
【解決手段】制御装置100は、各ステップにおける手先8の位置及び姿勢状態を取得する状態取得手段20と、各ステップにおける手先8の位置及び姿勢状態に基づいて、各ステップにおけるアームアングルψの実現可能な領域を算出する領域算出手段21と、隣り合うステップ間で領域同士が少なくとも一部重複するように、ステップs0からステップsnに至る間の領域の組み合わせを作成する組み合わせ作成手段22と、領域の組み合わせに基づいて、CP制御の各ステップにおけるアームアングルψを決定する冗長自由度決定手段23と、を備える。
(もっと読む)
ロボットの軌道計画システム及び軌道計画方法
【課題】ロードマップを用いて軌道計画を行う場合に、複雑な環境下でも指定されるタスクに応じた軌道計画を実現可能とし、かつ、軌道算出可能性を保証しつつ軌道計画に要する処理コストを低減可能とする。
【解決手段】ロボットの軌道計画システム20は、タスク種類と、初期姿勢と、最終姿勢と、に応じて構成された複数のノードがそれぞれ登録された複数のロードマップを記憶するロードマップ記憶部21と、入力されるタスク種類と、入力される初期姿勢及び最終姿勢と、から、対応するロードマップIDを特定するロードマップ選択器22と、周辺の環境情報を取得する環境情報取得器23と、ロードマップIDから対応するロードマップを特定して、入力される初期姿勢及び最終姿勢と、環境情報と、から、軌道を計画する軌道計画器24と、を備える。
(もっと読む)
1 - 20 / 121
[ Back to top ]