
Fターム[3C007MS08]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 干渉に対するもの (375) | 干渉の予測 (172)
Fターム[3C007MS08]の下位に属するFターム
動作領域等のモデリング (65)
Fターム[3C007MS08]に分類される特許
1 - 20 / 107
ロボットの軌道計画システム及び軌道計画方法
【課題】少ないノードで軌道計画の成功率を向上させることができる、ロボットの軌道計画システムを提供する。
【解決手段】本発明の一形態に係るロボットの軌道計画システム10は、グラフ構造データ格納手段に格納されているグラフ構造に対して、スタートノード及びゴールノードを追加し、さらに最終姿勢のハンドの周辺空間にノードを追加して、追加したノードと、隣接するノードとをエッジで接続し、スタートノードからゴールノードまでを結ぶ経路を探索するグラフ構造探索処理手段と、グラフ構造探索処理手段により探索された経路に含まれるノードが示す姿勢が、環境情報と干渉するか否かを判定し、干渉していると判定した場合には、ノードをグラフ構造から除外するノード有効性判定手段と、を備える。
(もっと読む)
干渉チェック方法及びロボット制御装置

【課題】ロボットアームと部品給材装置との干渉の有無を確実に発見する手段を提供する。
【解決手段】1方向に動作するロボットアーム100の移動方向と速さとを定めたベクトルデータであるロボットアーム並進速度データと、1方向に動作するワーク搬送装置の移動方向と速さとを定めるベクトルデータである部品給材装置200の並進速度データとから計算される相対速度データに基づく拡大処理から得られる拡大済み干渉ボリュームデータを生成する。拡大済み干渉ボリュームデータと、ロボットアーム100の形状データあるいは部品給材装置200の形状データとを、ロボットアームの位置姿勢データ及び部品給材装置200の位置姿勢データに従って、ロボットアーム100と部品給材装置が干渉の有無を確認する交差判定計算を行い、干渉の有無を判断する。
(もっと読む)
移動体
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
干渉検出方法及び干渉検出装置
【課題】2台のロボットが作業する際に、ロボット同士の干渉の有無を短時間で検出することを可能にするロボットの干渉検出方法及び干渉検出装置を提供すること。
【解決手段】第1多関節ロボット50a及び第2多関節ロボット50bの作業時におけるサンプリング時間ごとの姿勢を求め、第1多関節ロボット50aの各姿勢と第2多関節ロボット50bの各姿勢とを総当たりに比較し、第1多関節ロボット50a及び第2多関節ロボット50aの姿勢の干渉の有無を検出する干渉検出装置10において、基準サンプリング時間taよりも長く設定した区切り時間tbごとに、作業時における第1多関節ロボット50a及び第2多関節ロボット50bの距離を求め、区切り時間tbのそれぞれの中で用いるサンプリング時間を当該距離に応じて基準サンプリング時間taより長く設定する第1サンプリング時間設定部88を備える。
(もっと読む)
ロボット及びその制御方法
【課題】経路計画の計算量を低減することができるロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1の制御方法は、認識部21と、記憶部22と、ハンド部133が設けられたアーム13と、を備え、周囲に障害物91が存在する対象物90にハンド部133を接近させるようにアーム13の動きを制御するロボットの制御方法である。ロボット1は、認識部21により、対象物90の位置情報と、障害物91の固有の情報と、を取得する。ロボット1は、障害物91の固有の情報に対応して記憶部22に予め格納され、ハンド部133が障害物91を回避して対象物90に向かう軌道に関する軌道情報を取得する。そして、ロボット1は、軌道情報に基づいて、アーム13の動きを制御する。
(もっと読む)
ロボットの動作生成システム及び動作生成方法
【課題】達成させたい作業の動作を一度で確実に生成可能とし、短時間で動作生成を実行可能とする。また、軌道の計画可能性を保証しつつ、簡単な環境では短時間で軌道計画を可能とする。
【解決手段】複数のアームを備えるロボットの動作生成システムであり、アームの関節軸情報を示すノードと、当該ノード間を接続するエッジと、を有するグラフ構造をアームごとにグラフ構造データ格納部151に格納し、グラフ構造探索処理部154が、各アームに設定された優先度に従って、アームごとのグラフ構造を用いて、スタートノードからゴールノードまでを結ぶ経路を探索し、ノード有効性判定部155が、探索された経路に含まれるノード環境情報と干渉するか否かを判定し、干渉していると判定した場合には、当該ノードをグラフ構造から除外する。
(もっと読む)
双腕作業機械
【課題】作業の安全を確保しつつ、作業フロント同士を干渉危険領域まで接近させた状態で作業を行うことを可能とする双腕作業機械を提供する。
【解決手段】干渉負荷軽減装置200Aは、電磁切換弁50とリリーフ弁52とを備える。電磁切換弁50は、スイング用油圧シリンダ91のボトム油室91aに接続され、通常、リリーフ弁52を遮断している。スイング用油圧シリンダ91により駆動される作業フロントが干渉危険領域に達すると、電磁切換弁が位置dに切り換わり、スイング用油圧シリンダ71とリリーフ弁52が連通する。リリーフ弁52は、予め設定された圧力以上となると圧油を作動油タンク32に解放する。
(もっと読む)
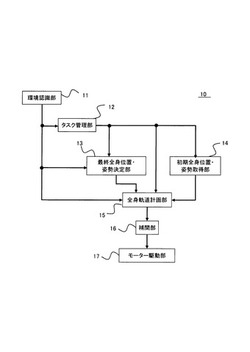
制御装置
【課題】タスクの実行開始を早めることができ、かつ、ロボットの動作が不連続性となることを防止することができるロボットの制御装置を提供する。
【解決手段】将来外界予測部130によりタスクの各実行段階における対象物の予測位置および予測姿勢を予め予測しておき、少なくともロボットRにより次に実行される実行段階におけるロボットRの目標軌道を生成しておく。
(もっと読む)
制御装置
【課題】処理負荷が増大することを抑制しつつ、ロボットに相互作用を伴うタスクを実行させることができるロボットの制御装置を提供する。
【解決手段】第1対象物T1に対して非接触状態から接触状態へ遷移する第1動作区分D1および第1対象物T1に対して接触状態から非接触状態へ遷移する第2動作区分D2では、ロボットRまたはロボットRと一体となった第2対象物T2と第1対象物T1との干渉判定を省略する。一方、これらの動作区分に連続する第3動作区分D3では、第1対象物T1を含めて干渉判定を実行する。
(もっと読む)
ワークの把持方法
【課題】バラ積み状態のワークを多フィンガのハンドで把持する場合に他のワークが対象ワークの上に重なっている状態であっても、ワークの把持を可能にし、ワークの把持成功率を向上させるワークの把持方法を提供する。
【解決手段】2つの把持装置(第1乃至第4フィンガF1乃至F4)を用いてワーク(リンフォースメントW)を把持するとき、把持しようとする把持対象ワーク(把持対象リンフォースメントT)に対して把持装置を挿入する一方の把持装置挿入箇所(領域A)に他のワークとの干渉がない状態で、一方の把持装置挿入箇所に第1の把持装置(第1フィンガF1及び第2フィンガF2)を挿入して把持対象ワークを把持して持ち上げる片持ち把持工程と、第1の把持装置によって持ち上げられた把持対象ワークのまわり(領域D)に第2の把持装置(第3フィンガF3及び第4フィンガF4)を挿入して把持する両持ち把持工程と、を含むワークの把持方法。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】対象物の個々の行動予測の困難性に応じて移動体の動作を制御する。
【解決手段】制御装置100は、所定の制御パラメータに基づいて移動体の行動を制御する制御部114と、対象物の特徴情報と対象物に関する危険情報とを対応付けて記憶している記憶部104と、対象物の特徴情報を認識する認識部102と、認識部102により認識された対象物と移動体との距離を検出する検出部108と、検出部108による検出結果と対象物の特徴情報に対応する危険情報とから、制御パラメータを決定する決定部112と、を備える。
(もっと読む)
脚式ロボットの歩行着地位置計画方法
【課題】着地予定初期位置がリアルタイムに変更され得ることに適した脚式ロボットの着地予定位置計画方法を提供する。
【解決手段】この歩行着地位置計画方法は次のステップを備える。コンピュータ内に、障害物をモデル化した3次元環境モデル空間(障害物W)を構築するステップ。足平の形状モデルを3次元環境モデル空間内で路面上に配置して障害物Wとの干渉チェックを行い、障害物と干渉しない位置に着地予定初期位置f1〜f8を定めるステップ。このステップによって少なくとも2歩分の着地予定初期位置を求めた後、足平形状モデルより足平面内方向のサイズが大きい拡大足平モデル(a1等)を3次元環境モデル空間内で着地予定初期位置に配置して障害物Wとの干渉チェックを行い、路面と平行な方向にて障害物と干渉しない範囲まで拡大足平モデルを狭め(符号b4の領域を削除する)、狭めた拡大足平モデルを路面投影した着地許容範囲を定めるステップ。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
サービス提供装置、サービス提供プログラム及びサービスロボット
【課題】サービス対象者を適切に選択することを課題とする。
【解決手段】サービス提供装置1は、移動情報取得部2と、干渉判定部3と、サービス対象者選択部4とを有する。移動情報取得部2は、自装置を基準として規定される第1の領域に存在する複数の人の移動方向及び移動速度を取得する。さらに、干渉判定部3は、移動情報取得部2によって取得された複数の人の移動方向及び移動速度からそれぞれ推定される人の移動推定軌跡が第1の領域よりも小さく、かつ自装置を基準として規定される第2の領域へ干渉するか否かを判定する。サービス対象者選択部4は、自装置がサービスを提供するサービス対象者として、干渉判定部3によって移動推定軌跡が第2の領域へ干渉すると判定された人を選択する。
(もっと読む)
ロボットシステム
【課題】 環境内において、ロボットが通行してよい領域、通行を許さない領域を容易に設定するロボットシステムの構築を課題とする。
【解決手段】
レーザ距離センサを搭載したロボットを用い、通行可能な範囲の境、例えば壁面などに沿ってロボットを移動させる。この移動の際、距離センサによるセンサデータを記録しておき、これを環境の幾何形状を表す地図とマッチングすることで、環境中をロボットが移動したときの軌跡を求める。この軌跡の各点において、センサによる走査を行った場合に、レーザが地図上の障害物と交わる位置を求め、障害物との交わりが軌跡の内側にある場合は進入禁止領域、そうでない場合は通行可能領域と設定する。
(もっと読む)
物体認識ロボットシステム
【課題】3Dレーザ計測技術で得られた測定データによるモデルマッチングを行わずに、ロボットがワークに対して作業を行うために必要なデータを抽出し、ワークに対して作業を行うことができる物体認識ロボットシステムを提供する。
【解決手段】ワーク表面の様々な箇所で点測定を行ってワークの3次元データを有する点群データを取得する3Dセンサ20と、3Dセンサ20で得られた点群データより、ワークの位置情報及び法線情報を少なくとも算出する物体認識装置22と、物体認識装置22から少なくとも位置情報及び法線情報を受信し、物体認識装置22から取得した情報に基づいて、ロボット10の動作を制御するロボット制御信号、及びロボット10の先端に取り付けられたエンドエフェクタ15のエンドエフェクタ制御信号を生成するロボットコントローラ30とを備える。
(もっと読む)
ロボットの動作軌跡表示装置
【課題】作業者がロボットの手先の動作軌跡を把握できながら、ロボットの手先の動作軌跡がロボットの動作を妨げ得る物体表面に接近する箇所を把握できるようにする。
【解決手段】ロボットの手先の動作軌跡24については、従来から何ら変更することなく従来通りの表示態様で表示する一方で、物体表面図形22、23については、ロボットの手先の動作軌跡24から一定距離以下である接近点が存在すると、接近点が含まれる領域である接近領域31、32を接近点が含まれない領域と区分して表示する。
(もっと読む)
荷電粒子ビーム装置及び搬送ロボットのティーチング方法
【目的】搬送ロボットをチャンバ等に衝突させずにティーチング可能な装置を提供することを目的とする。
【構成】本発明の一態様の荷電粒子ビーム装置は、ロボットハンド143を有し、荷電粒子ビームが照射される基板をロボットハンドに配置して搬送する搬送ロボット142と、搬送ロボットによって基板が搬送される描画室103と、搬送ロボットの移動位置をティーチングする際のロボットハンドの予定位置を示す予定位置座標を入力し、予定位置座標にロボットハンドを移動させた際にチャンバに干渉するかどうかを検証する検証部14と、検証の結果、干渉しない場合に、予定位置座標にロボットハンドを移動させるロボットコントローラ114と、検証の結果干渉しない予定位置座標をティーチング座標として登録する登録部16と、を備えたことを特徴とする。
(もっと読む)
ロボットアームの干渉回避方法
【課題】冗長性を有する多関節のロボットアームを各関節に干渉の起こらないような関節位置をとりうる全関節位置から算出し教示することなく、ロボットアームの干渉回避を行うことができるロボットアームの干渉回避方法を提供する。
【解決手段】ロボットアームを現在の姿勢から別の姿勢に移行させる際に、制御装置により予め冗長関節12,14,16の必要回転角度を演算し、この必要回転角度による各関節、各アーム及びハンドの移動予測点が進入禁止領域20に入らない場合には、前記必要回転角度を各関節の指示値として、別の姿勢にロボットアームを移行させ、移動予測点が進入禁止領域20に入る場合には、あらかじめ設定された回避動作を実行する。
(もっと読む)
対象物把持領域抽出装置および対象物把持領域抽出装置を用いたロボットシステム
【課題】
位置姿勢が未知な対象物が置かれた供給部の三次元情報から、ロボットの把持機構で把持可能な対象物を含む把持領域を抽出する。
【解決手段】
ロボットで把持する対象物の供給部の三次元計測データから供給部の三次元情報を生成し、予め記憶された把持機構領域と把持部分領域とからなる把持領域を用い、把持部分領域の全体に物体が存在し、把持機構領域に物体が存在していない領域を、三次元情報から把持可能領域として抽出する。
(もっと読む)
1 - 20 / 107
[ Back to top ]