
Fターム[3C007MS09]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 干渉に対するもの (375) | 干渉の予測 (172) | 動作領域等のモデリング (65)
Fターム[3C007MS09]に分類される特許
1 - 20 / 65
干渉チェック装置及びプログラム
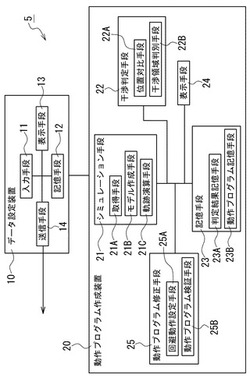
【課題】ワークとロボットからなる複数の可動物体間の干渉をチェックして、干渉が発生する動作プログラムを自動で修正する。
【解決手段】取得手段21Aが、複数の可動物体の形状データ及び動作プログラムを取得する。モデル作成手段21Bが、形状データに基づいて、複数の可動物体モデルを作成する。シミュレーション手段21が、動作プログラムと可動物体モデルに基づいて、複数の可動物体モデルの動作をシミュレーションする。干渉判定手段22が、シミュレーション結果に基づいて、複数の可動物体モデル間の干渉の有無を判定する。回避動作設定手段25Aが、干渉する可動物体モデルの動作プログラムに干渉の回避動作を設定する。動作プログラム検証手段25Bが、回避動作を設定した動作プログラムの干渉の有無を判定させる。
(もっと読む)
ロボットの移動方向決定方法及びロボットの制御装置

【課題】ユーザがロボットをリアルタイムで動作させる場合でも、ロボットを動作領域の限界まで動作させる。
【解決手段】ロボットの動作領域空間をキューブの集合として捉え、各キューブの外面を規定する3次元座標値を決定し、それらを安全空間と危険空間との何れかに評価した空間評価データを用い、手先部分を覆うガード領域Gを設定する。ユーザが、ジョイスティックで指示した方向に手先を移動させ続けるとガード領域Gと危険空間が干渉する場合で両者が面で接触すれば、その面と平行な方向に手先を移動可能であれば単位距離だけ移動させた後(S14)、指示方向への移動を再試行する。両者が面で接触しない場合,又はガード領域Gが干渉する場合は、指示方向を3つの方向ベクトルに分解して第1方向,第2方向を定め(S5)、手先を第1方向に移動可能であれば単位距離だけ移動させた後(S15)指示方向への移動を再試行し、干渉する場合は第1方向を45度回転させた方向を次に移動させる候補にする(S8)。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、3次元空間を2次元平面上に投影し、2次元平面をn1×n2のマス目に区切るマス目管理部424と、障害物対応マス目を特定し障害物占有情報で初期化するメモリ領域初期化部425と、ロボット対応マス目を特定しロボット占有情報を記録する占有情報記録部426と、ロボット占有情報と干渉条件情報間の論理積を求め、論理積の全ての桁が「0」なら「干渉無し」と、少なくとも一つの桁が「1」なら「干渉有り」と判断する判断部427を備える。ロボット対応マス目のメモリ領域に障害物占有情報が記録されている場合に、障害物占有情報と識別番号間の論理和がロボット占有情報となる。
(もっと読む)
ロボットの評価制御方法及びロボットの制御装置
【課題】ロボットが設置された現場でティーチングを行う際に、ユーザがロボットと設備との衝突を回避できるよう支援する評価制御方法を提供する。
【解決手段】ロボット本体が動作する動作領域空間を、立方体状の単位空間であるキューブの集合として捉え、各キューブの外面を規定する3次元座標値を決定すると、キューブよりもサイズが大きな空間によって、ロボット本体の手先部分を覆うボックス領域を設定する。ロボット本体の動作を開始させる前に各キューブの評価を全て「危険」に設定しておき、ロボット本体が動作することでボックス領域の内部に全体が含まれたキューブについては(S5:YES)評価を「安全」に変更する(S6)。
(もっと読む)
ロボット及びその制御方法
【課題】対象物を認識しながらアーム等を対象物まで近づけることができる新規なロボット及びその制御方法を提供すること。
【解決手段】本発明にかかるロボット1は、頭部11、ロボット本体12、アーム13、カメラ14、物体認識部15、認識空間算出部16、軌道算出部17、可動制御部18を備える。カメラ14は、ロボット本体12の周囲の物体の環境情報を取得する。物体認識部15は、カメラ14が取得した環境情報に基づいて、ロボット本体12の周囲に存在する把持対象物90を認識する。認識空間算出部16は、物体認識部15により把持対象物90を認識するために必要とする空間としての認識空間20を算出する。軌道算出部17は、アーム13が、認識空間20への侵入を回避しつつ、把持対象物90に向かう軌道を算出する。可動制御部18は、アーム13の認識空間20への侵入を回避するように、アーム13の動きを制御する。
(もっと読む)
ロボットアーム操作システムおよびその操作方法
【課題】ロボットアームの操作に当たり、安全、確実かつ容易に障害物を回避する。
【解決手段】ロボットアーム操作システムは、リアルタイムで受信した操縦指令値に基づいてロボットアーム2を操縦する遠隔操縦部1と、障害物の3次元形状モデルを含む環境データを保存する環境データ保存部4と、障害物との距離が近いほど斥力ベクトルが大きくなるように仮想的な斥力ベクトル場を設定する斥力ベクトル場生成処理部5と、斥力ベクトル場を利用してロボットアームに対して障害物から遠ざかる方向への仮想的な斥力を算出する仮想力生成処理部6と、仮想力生成処理部6により算出された仮想的な斥力と遠隔操縦部1からの操縦指令値とを組み合わせてロボットアームへの動作指令値を生成するロボットコントローラ3と、を有する。
(もっと読む)
干渉判定装置および干渉判定方法
【課題】干渉のない立体交差を考慮しつつも、干渉判定を短時間で行う。
【解決手段】
識別番号を各部位に割り当てる識別番号割当部421と、干渉情報を格納する干渉情報格納部412と、干渉条件情報を格納する干渉条件情報格納部413と、ロボットの動作する空間を2次元平面上に投影した上で、2次元平面をn1×n2のマス目に区切るマス目管理部424と、対応マス目を特定し、占有情報を対応マス目ごとに記録する占有情報記録部425と、占有情報および干渉条件情報の桁ごとの論理積を求め、論理積の全ての桁が「0」なら干渉無しと判断し、少なくとも一つの桁が「1」なら干渉有りと判断する判断部426と、を備える。干渉情報は、立体交差する際に干渉を伴わないなら「0」、干渉を伴うなら「1」を表す。
(もっと読む)
ロボットシステム
【課題】ロボット作業の安全性を高めると共に、工場などでの床スペースを有効活用でき、また、設備を簡易化できるようにする。
【解決手段】ロボットのアーム及び手首に備えたワークやツールを含めたアーム占有領域と、アームが接触してはならない仮想安全防護柵と各軸の動作可能範囲をメモリー上に定義し、次回目標位置への動作指令を実行中にロボットを緊急停止した場合のロボット各軸の惰走角度を実際に測定した惰走量などから推定し、次回目標位置に加算することでロボットの惰走予測位置を求め、惰走予測位置におけるアーム占有領域と仮想安全防護柵とが接触しないか、またロボット各軸位置が動作可能範囲内であるかを確認し、異常が確認された場合に、直ちにロボットの動作を停止する制御を行なう という手順で処理する。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】対象物の個々の行動予測の困難性に応じて移動体の動作を制御する。
【解決手段】制御装置100は、所定の制御パラメータに基づいて移動体の行動を制御する制御部114と、対象物の特徴情報と対象物に関する危険情報とを対応付けて記憶している記憶部104と、対象物の特徴情報を認識する認識部102と、認識部102により認識された対象物と移動体との距離を検出する検出部108と、検出部108による検出結果と対象物の特徴情報に対応する危険情報とから、制御パラメータを決定する決定部112と、を備える。
(もっと読む)
干渉チェック装置
【課題】処理負荷を低減しつつ、干渉の可能性のある構成要素を確実に検出することができる干渉チェック装置を提供する。
【解決手段】干渉検出モデル設定部12が、ロボットRの頭、胸、腰、右上腕、右肘、右前腕・・の各部位をおのおの含む大まかなカプセル状の干渉空間(第1モデル)と、干渉空間に対応した詳細干渉空間(第2モデル)とを設定する。簡易モデルチェック部15が干渉空間同士の重なり合いから干渉を検出した部位について、詳細モデルチェック部17が詳細干渉空間の重なり合いから干渉を検出する。
(もっと読む)
干渉チェック方法、干渉チェック装置、及び干渉チェックプログラム
【課題】三次元物体同士の干渉の有無の評価と併せて、両者の隙間距離や最近傍位置の評価を高速に処理する。
【解決手段】干渉チェック装置10は、仮想空間をメッシュ分割して小さな領域に細分化する空間細分化部11、メッシュの各頂点と基準物体オブジェクトの表面までの最短距離と方向を算出して各メッシュ頂点に付随する情報として登録することで基準物体オブジェクトまでの最短距離マップを作成する最短距離マップ作成部12、移動物体オブジェクト上に基準物体オブジェクトまでの最短距離を評価するための評価点を設定する最短距離評価点設定部13、最短距離評価点の座標値に基づいて最短距離マップを参照することで基準物体オブジェクトまでの最短距離を取得する干渉チェック部14を備える。
(もっと読む)
ロボットの干渉回避装置および干渉回避プログラム
【課題】ロボット装置の干渉回避を優先順位を設けずに少ないメモリ量で実現する。
【解決手段】ブロック分割部31は、ロボット装置10−1,10−2の可動領域を分割して得られる各実空間ブロックの実空間ブロック座標値から、仮想空間における各仮想空間ブロックの仮想空間ブロック座標値を計算する。ブロック分割部31は、仮想空間ブロック座標値と、それを所定方向に所定距離だけオフセットさせて得られる所定数の仮想空間オフセットブロック座標値とのセットである仮想空間ブロック座標値セットをメモリ部33に記憶する。インターロック制御部32は、ロボット制御装置20−1,20−2から干渉回避制御要求情報を供給されると、その干渉回避制御要求情報と仮想空間ブロック座標値セットとに基づいて干渉回避制御を行い、ロボット制御装置20−1,20−2に対し進入許可情報またはエラー情報を送信する。
(もっと読む)
物体認識装置および物体認識方法
【課題】物体認識結果の誤検出を防止しつつ日常生活空間内の対象物の物体を認識し、その認識精度を向上することができ物体認識装を提供する。
【解決手段】
データベースに記憶されている物体情報及び環境情報のデータを参照して、撮像手段により出力された画像情報から識別対象の物体及び環境を認識して環境における当該物体の位置・姿勢を識別する物体認識手段と、識別された物体の物体情報および環境情報から、データベースに記憶された物体情報の物理特性を取り出して環境中の物体の移動に対する物理シミュレーションを行う物理シミュレーション手段と、物理シミュレーションの結果により物体と環境中の物体との距離に基づいて干渉のチェックを行うと共に、物理シミュレーションにより物体が物理的な拘束に基づいた物体の移動の予測位置を出力するシミュレーション比較手段と、出力された物体の移動の予測位置が識別された物体との干渉のチェックによって物理的な拘束の矛盾が生じるか否かを判定して出力する判定出力手段を備える。
(もっと読む)
ロボット制御装置、ロボットの制御方法
【課題】ロボットの不要な回避動作を低減し、動作効率の向上を図る。
【解決手段】駆動プログラムに従ってロボットを駆動させるロボット制御装置であって、前記ロボットの動作方向を示す動作線と、ある地点における前記ロボットと障害物とを結ぶ仮想直線とで成す角度を取得する角度取得部と、取得した前記角度と所定の角度基準値との比較結果に基づいて、前記ロボットの駆動を制御する制御部と、を備えたことを特徴とする。
(もっと読む)
ロボット制御装置、ロボット制御方法
【課題】複数のロボットの動作における干渉領域に対して、同時期にロボットを進入させ、作業効率の向上を図る。
【解決手段】複数のロボットを制御するロボット制御方法であって、前記ロボットが動作する動作領域を演算する動作領域演算ステップと、前記動作領域に基づいて、前記ロボット間で前記動作領域が相互に干渉する干渉領域を演算する干渉領域演算ステップと、前記ロボットの動作から前記干渉領域に進入する進入動作を抽出し、前記進入動作を、前記干渉領域に進入する前の第1進入動作と、前記干渉領域に進入した後の動作を含む第2進入動作と、に区分けする動作区分けステップと、各前記ロボットの前記第2進入動作を比較し、前記第2進入動作が相互に干渉しないように、前記第2進入動作の順番を割り当てる進入動作割当てステップと、を含む。
(もっと読む)
ロボットの侵入禁止領域算出方法
【課題】ロボットの侵入禁止領域を効率良く求める。
【解決手段】ロボットの動作を擬似的に再現する空間領域のうち、他のロボットの侵入を禁止する侵入禁止領域を算出するロボットの侵入禁止領域算出方法であって、前記空間領域を段階的に細かく分割して、複数の空間ブロックを形成するとともに、前記ロボットの動作を含まない前記空間ブロックを演算の対象から除外し、演算対象領域を絞り込みながら、前記侵入禁止領域を算出する算出ステップを含む。
(もっと読む)
ロボット装置の制御装置及びロボット装置の制御方法
【課題】マニピュレータを備えたロボット装置の制御装置において、マニピュレータと人との干渉、接触を確実に防止しつつ、装置のダウンタイムを減少させ、稼働効率が低下しないようにする。
【解決手段】マニピュレータ1の可動領域を包括し可動領域よりも広い領域であって侵入物体101の侵入が可能である警戒領域Bに対する侵入物体101の侵入を監視する侵入検知手段6と、マニピュレータ1の動作状態を特定するとともにマニピュレータ1の動作を制御する制御手段3,7とを備える。制御手段3,7は、検知手段6により、警戒領域B内への侵入物体101の侵入が検知された場合には、マニピュレータ1の動作を減速させ、マニピュレータ1の可動領域A内への侵入物体101の侵入が検知されるとともにマニピュレータ1と侵入物体101との距離が所定の距離以下となったときには、マニピュレータ1の動作を停止させる。
(もっと読む)
人間とロボットとの協調動作領域を有する生産システム
【課題】人間の安全を確保しながら、人間とロボットが同じ作業空間で同時に作業を行う協調動作を可能とする。
【解決手段】作業机6を挟んで一方の側にロボット2が配置され、反対側に作業員1が位置しており、作業員1の手が届く範囲は、作業机6のために制限されている。その結果、作業机6上は、作業員1のみが動作可能な人間動作領域3、ロボット2のみが動作可能なロボット動作領域4、およびそれらの間で作業員1とロボット2が共に動作可能な協調動作領域5に分かれている。ロボット2の制御手段は、協調動作領域内5では、ロボット2の構成部分の最高速度を協調動作領域5外におけるよりも低速に制限し、かつ、協調動作領域5内で作業机6や部材10などの周辺部材から所定の距離内のロボット進入禁止領域8にロボットの構成部分が進入しないようにロボット2の動作を制御する協調動作モードを有している。
(もっと読む)
ロボットの安全監視装置
【課題】安全に作動させることができるロボットの安全監視装置の提供。
【解決手段】作動コントローラー2は、関節アームに含まれる各々のリンクおよび狭持片の目標位置を算出し、算出した目標位置に基づき、サーボモーター53a〜53f,54f,54gの作動を制御する。領域判定部10は、各狭持片ごとに、複数のリンクと狭持片が直列に接続された一対のリンク列を設定する。領域判定部10は、リンクおよび狭持片の現在位置に基づいて、リンク列ごとに関節アームの現在位置を算出し、算出したリンク列ごとの関節アームの現在位置が安全作動領域内にあるか否かを判定する。安全停止部11は、いずれかのリンク列について、関節アームの現在位置が安全作動領域外にあると判定された場合に、サーボモーター53a〜53f,54f,54gの作動を停止させる。
(もっと読む)
ロボットの動作許容領域の自動設定装置
【課題】作業者の熟練度に依存せず、ロボットの適切な動作許容領域をオフラインで自動的かつ迅速に設定できる自動設定装置を提供する。
【解決手段】ロボット32の通過領域を複数の小通過領域に分割する。分割の方法としては、ロボットの特定の軸の値の範囲に基づいて行う方法が考えられる。分割生成された複数の小通過領域の各々を包括すなわち完全に覆う1つ又は複数の基本形状を自動的に求め、各小通過領域のための包括立体として設定する。例えば作業領域50及び52の包括立体52及び54をそれぞれ1つの球とし、両作業領域間を結ぶ3つの動作経路42、44及び46の包括立体56、58及び60をそれぞれ1つの円柱とする。
(もっと読む)
1 - 20 / 65
[ Back to top ]