
Fターム[3C007WA04]の内容
マニピュレータ、ロボット (46,145) | 自走、自律型のタイプ (2,408) | 生物型ロボットの形態 (826) | 動物型 (826) | 犬、猫型 (36)
Fターム[3C007WA04]に分類される特許
21 - 36 / 36
位置指示方法とこの方法を実現するための指示装置及びプログラム

【課題】特殊な検出デバイス群を使用することなく指示者のジェスチャによる指示をロボットに伝達できるようにする。
【解決手段】先ず携帯端末MSのディジタルカメラ2によりペットロボットPRを撮像してその画像データからQRコードの座標値を検出し、この座標値をもとに携帯端末MSとペットロボットPRとの相対位置(第1相対位置)及び姿勢(第1姿勢情報)を算出する。次に携帯端末MSを目標点TGに向けてこのときの姿勢(第2姿勢情報)を姿勢センサ5により検出し、この姿勢情報をもとに携帯端末MSと目標点TGとの相対位置(第2相対位置)を算出する。最後に、上記第1及び第2の相対位置と第1及び第2の姿勢情報をもとに、ペットロボットPRから見た目標点TGの相対的な位置関係(目標相対位置)を算出し、この目標相対位置をもとにペットロボットPRを目標点TGに移動させる。
(もっと読む)
ペット型ロボット

【課題】安価で広範な種類の四足動物を模したペット型ロボットを楽しむことができる外皮被着構造を備えたペット型ロボットを提供する。
【解決手段】ロボット本体1は、四足動物の体型を模した共通の筐体f1を有している。被覆体2は、ロボット本体1に着脱自在に被覆し、各四足動物を模した容姿が個別に異なっている。ロボット本体1は、胴体部3と、胴体部3に取り付けられる頭部4と、胴体部3に取り付けられ、少なくとも歩行可能な複数の可動脚5a〜5dと、を備えている。
(もっと読む)
移動ロボット、マーカ、移動ロボットの位置姿勢算出方法、移動ロボットの自律走行システム
【課題】マーカの個数が少ない場合であっても高精度に自己位置を算出する移動ロボットを提供すること。
【解決手段】移動領域の地図情報と、予め定められた場所に設置されたマーカの位置情報と、マーカを一意に識別する識別情報と、移動領域内に存在する複数の物体を区分しマーカの近傍に存在する境界線の位置情報と、を対応付けて格納する地図情報記憶部120と、撮像手段により撮影した画像からマーカの位置情報と識別情報とを検出するマーカ検出部111と、マーカの近傍に存在する境界線を画像から検出する境界線検出部112と、境界線の画像中における位置の情報を含む境界線のパラメータを算出するパラメータ算出部113と、地図情報記憶部120に記憶されている境界線の位置情報と、算出したパラメータとに基づいて自装置の移動領域内における位置および姿勢を算出する位置姿勢算出部114とを備えた。
(もっと読む)
盲導犬型ロボット
【課題】 目が不自由な飼い主が従来の盲導犬型ロボットの手綱を離してしまうと、手綱を探すことは困難である。
また、飼い主が急病で倒れそうになっても、従来の盲導犬型ロボットはそれに気付かないという課題がある。
【解決手段】 目が不自由な飼い主と盲導犬のように接触して誘導するロボットであって、該飼い主を認識する手段と、該飼い主が該ロボットに接触していることを認知する手段を備え、該飼い主が該ロボットから離れると該飼い主を探して接触する機能および、該飼い主の健康状態を診察する機能を備える。
(もっと読む)
移動ロボット
【課題】燃料電池を動力源とし自律的に所定の場所に排水を行う移動ロボットを提供すること。
【解決手段】脚式移動ロボット100は形状が犬に模されており、内部に設けられた燃料電池101を動力源としている。当該燃料電池101はメタノールを燃料としており、発電すると水を生成する。このため、脚式移動ロボット100はメタノールタンク103と水回収タンク107を備え、メタノールを飲み、燃料電池による生成水を小便のように排水するよう動作することによって、実際の犬により近い行動または動きを実現している。また、脚式移動ロボット100は、メタノール貯蔵器201および植木鉢301から発せられる電波を受信して、これらの位置を検出する手段を備えている。
(もっと読む)
自律移動ロボットの電池充電システム。
【課題】 副電池をロボットに内蔵させることによって、ロボットが充電ステーションで電池充電中であっても、副電池によって走行機能以外のロボット機能を中断することなく働かせておくことのできるロボットの電池充電システムを低コストで提供する。
【解決手段】 制御部3によってコントロールされる自走機構を備えたロボットAであって、前記制御部1の電源となる主電池5と、充電器Bによる主電池5の充電時において制御部1に電力を供給する副電池6と、これら主電池5並びに副電池6と制御部1との制御部電源回路、及び、主電池5並びに副電池6と充電器Bとの電池充電回路を切り替える回路切替手段とからなる構成とした。
(もっと読む)
描画ロボットおよびその制御方法、並びに制御プログラム
【課題】簡単な構成でより自然な動きで自然な文字や図形を描くことができる描画ロボットおよびその制御方法、並びに制御プログラムを提供する。
【解決手段】描画媒体上を移動しながら文字又は図形を描画する描画ロボットであって、描画用ペンが取り付けられ、所定中心点を基準に旋回可能な旋回アームと、少なくとも前後にロボット自身を移動可能にするための車輪と、旋回アームの旋回角度及び旋回アームの旋回動作によって生じたズレ量に関する情報を取得し、この旋回角度及びズレ量に基づいてアームの動作を制御する制御手段と、を備える。ズレ量は、所定のストロークの始点及び終点間の筆軌跡に関する情報をも考慮して算出される。
(もっと読む)
コミュニケーションシステム
【課題】 通信回線で接続された1対のロボットにおいて通信遮断時においても、ジェスチャ情報による意思伝達ができるコミュニケーションシステムを提供する。
【解決手段】1対のロボット1A,1Bが通信回線2を介して接続され、一方のロボット1Aが行ったジェスチャ情報を他方のロボット1Bに伝達することによって、相手側に意思伝達を図るコミュニケーションシステムにおいて、ロボット1Aが行ったジェスチャ情報を蓄積する蓄積部8と、通信回線2の状態を判定し遮断信号あるいは回復信号を出力する検知出力部7と、通信が遮断した場合、遮断信号に基づいて、蓄積部8にロボット1Aが行っているジェスチャ情報を蓄積させる指示信号を出力する指示部9と、通信が回復した場合、回復信号に基づいて、蓄積部8に蓄積されたロボット1Aが行っているジェスチャ情報を通信回線2を介して再び送信する指示信号を出力する指示部10とを有する。
(もっと読む)
動作伝達システムおよび動作伝達方法
【課題】 従動体に意味のある動作(安全な動作等)をさせるように原動体の動作を従動体へ伝達することができる動作伝達システムおよび動作伝達方法を提供すること。
【解決手段】 動作データ取得手段220Aにより原動体1Aの動作データを取得し、この動作データに基づき、予め作成された学習モデルを用いて認識処理を行うことで、原動体1Aの動作を学習済みの複数種類の運動パターンのいずれかに分類し、分類して得られた運動パターンについての運動パターン識別情報(LAU(Left Arm Up)等の言語レベルの情報)を、変換テーブルを用いて制御信号識別情報に変換し、従動体2A等に送信する。一方、従動体2A等の側には、その従動体の形状や構造等の特性に合わせた可能動作群を用意しておくことで、従動体2A等をリアルタイムで原動体1Aの動作に追従させる。
(もっと読む)
歩行ロボット
【課題】 本体部の支持または歩行において冗長となる関節部に対して、関節軸を回動するアクチュエータの小型化、軽量化を図り、かつ本体部を支持していない状態では関節部を自由に回動できる歩行ロボットを得ることを目的とする。
また、本体部の支持及び歩行時に、冗長となる関節部のアクチュエータでの、消費電力の低減が可能な歩行ロボットを得ることを目的とする。
【解決手段】 この発明に係る歩行ロボットは、その脚部に回動可能な関節部を備え、関節部には関節軸201と、関節軸201を回動させるためのモータ205とを備えている。そして、脚部の床面への接地に連動して関節軸201の回動を規制する規制手段(プッシュロッド210、ロックピン212、213等)を備えている。
(もっと読む)
対話型ペットロボット
【課題】発話フレーズ数や待受けフレーズ数の制約があっても、会話を促進可能な新規な対話型ペットロボットを提供する。
【解決手段】対話型ペットロボットは、記憶部より読み出されたプログラムの記述にしたがった処理を行う制御部9とを有する。プログラムは、ユーザとの会話の進行手順を分岐付で規定しており、ある質問の内容と、質問に対する返答となる複数の選択肢と、選択肢のそれぞれに対するアクションとが対応付けて記述されている。質問の内容が音声出力された場合、質問に対する返答の候補として、質問に対応付けられた複数の選択肢をディスプレイ3に表示させる。ディスプレイ3に表示された複数の選択肢のうちのいずれかがユーザによって全文が発話された場合、音声認識を行って、ユーザの発話に対応する一の選択肢を特定するとともに、この一の選択肢に対応するアクションを、返答に対して対話型ペットロボットが次にとるべき反応として決定する。
(もっと読む)
ロボット、ヒント出力装置、ロボット制御システム、ロボット制御方法、ロボット制御プログラム及び集積回路
従来から、利用者を識別し、利用者毎に異なる行動パターンを取るペットロボットや、ペットロボット自身の行動履歴に基づいて、段階的に行動パターンを変化させ、成長の過程を演出するペットロボットが存在する。 本発明は、メモリカードを所持した利用者と接する際に、メモリカードから、メモリカードの識別情報、利用者に関する情報、利用者がロボットに接した履歴情報など、各種の情報を取得し、取得した情報を反映したする行動をすることで、利用者に、より高い満足感を与えることができるロボットを提供する。 (もっと読む)
オブジェクトを動画化するのを可能にする電子装置及び方法
本発明の電子装置は、第一のアニメーションにおけるオブジェクトの少なくとも1つの位置、オブジェクトの第二のアニメーションの第一の部分に基づいて、オブジェクトの新たなアニメーションの第一の部分を決定可能な処理ユニットを有する。さらに、処理ユニットは、第二のアニメーションの第二の部分に基づいて新たなアニメーションの第二の部分を決定可能である。オブジェクトを動画化するのを可能にする方法は、オブジェクトの第一のアニメーションにおけるオブジェクトの少なくとも1つの位置、オブジェクトの第二のアニメーションの第一の部分に基づいて、第一の期間の間にオブジェクトを動画化するのを可能にする第一のステップを含む。本方法は、オブジェクトの第二のアニメーションの第二の部分に基づいて第二の期間の間にオブジェクトを動画化するのを可能にする第二のステップを含む。 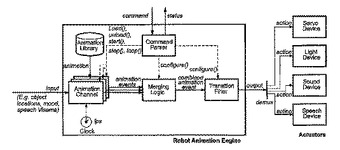 (もっと読む)
(もっと読む)
アニマトロニクス・フィギュアの現実的な動作を生成する計算環境
アニマトロニクス・フィギュアの動作を生成するシステムを開示する。このシステム(200)は、異なる種類の動作をリアルタイムで生き物のように生成すべく構成されている。動作ソフトウェアモジュール(106)は、ユーザ入力の動作を、ユーザが選択した固定の動作列及び/またはアルゴリズム的に計算した動作と組み合わせることによって合成動作を形成する。アニマトロニクス・フィギュアの動作をさらにフィルタ処理して、生き物のような動きを生成する。組合せ動作は、要素動作を重ね合わせ、変化させ、あるいは修正することによって形成される。ユーザ入力コマンド及び刺激から決まるコマンドに基づいて動作をフィルタ処理して、生き物のような動きを生成する。 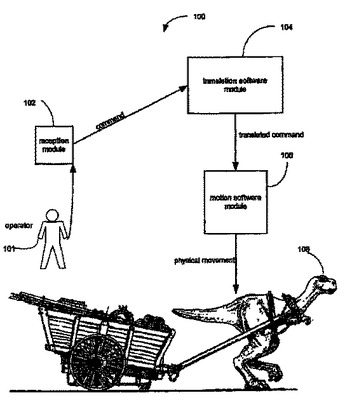 (もっと読む)
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
21 - 36 / 36
[ Back to top ]