
Fターム[3C007WB16]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 外部情報を利用するもの (521)
Fターム[3C007WB16]の下位に属するFターム
人の状態(表情、行動等) (151)
人からの指示 (108)
他のロボットの状態、指示 (25)
障害物、作業物の情報を利用するもの (136)
Fターム[3C007WB16]に分類される特許
1 - 20 / 101
外力判定用パラメータ決定装置及びプログラム、並びに移動体装置
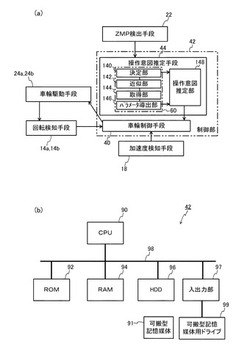
【課題】ロボットに与えられている外力判定を高精度に行うための閾値を決定する。
【解決手段】近似部142が、ロボットに対して人的操作による外力及び積載による外力をそれぞれ与えたときにロボットに加わる垂直抗力を所定のサンプリング周期(Δt)で取得し、各サンプリング間隔における垂直抗力の変動量を指数関数で近似する。また、取得部144が、f0の値を変更しつつ、各外力における垂直抗力の変動量がf0を超える確率GL、GHをそれぞれ求め、それらの確率の差分を取得する。そして、パラメータ導出部146が、取得部が取得した確率の差分に基づいて選択されるf0の値を、外力の判定に用いるパラメータ(閾値fc)とする。
(もっと読む)
移動ロボット

【解決手段】移動ロボット10は、移動速度データベース88を含み、人と共存する様々な環境内を自律的に移動する。移動速度データベース88には、人の移動速度の傾向を表す代表値に応じて定められる最大移動速度が、環境内の各エリアのそれぞれと対応付けて記憶される。移動ロボット10は、移動する際には、現在地に対応する最大移動速度を移動速度データベース88から読み出して設定し、設定した最大移動速度を上限とした移動速度となるように移動する。
【効果】周囲の人と調和した移動が可能となるので、周囲の人の邪魔になることなくスムーズに移動できる。
(もっと読む)
ロボットおよび制御システム
【課題】
連続状態変数および離散状態変数の組み合わせ最適化問題の解導出の高速化を図ることができる制御システム等を提供する。
【解決手段】
内部モジュールmod1による行動候補ai1の探索範囲(第1探索範囲)は、低周波の外部モジュールmod2による外部行動候補ai2の探索範囲(第2探索範囲)よりも狭くすることで、その分だけ演算処理が早くなる。これにより、ロボットRの状態測定値に鑑みて、ロボットRが外乱に緊急に対応する必要がある場合、低周波の外部モジュールmod2の演算処理結果を待たずに、高周波の内部モジュールmod1の演算処理結果にしたがってロボットRの動作が制御されうる。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
行動制御システムおよびロボット
【課題】動いているオブジェクトに対してエージェントが確実に力を作用させるように、このエージェントの行動を制御することができるシステムを提供する。
【解決手段】本発明の行動制御システムによれば、オブジェクト(ボール)の予測位置軌道と、カウンターオブジェクト(ラケット)の位置軌道候補との時系列的な確率密度分布の重なり度合いCiが算出される。さらに、カウンターオブジェクトの複数の位置軌道候補のうち、オブジェクトの予測位置軌道との重なり度合いCiが最高の一の位置軌道候補の平均位置軌道または中心位置軌道である目標位置軌道にしたがってカウンターオブジェクトが動かされるようにロボット1(エージェント)の行動計画が生成される。
(もっと読む)
機構体、外力検出方法及び機構体の制御方法
【課題】ロボットなどの機構体に付与される外力の大きさ及び方向の少なくとも一方の取得を安価に実現する。
【解決手段】移動部20と、移動部20に支持されたロボット本体10と、ロボット本体10及び移動部20のいずれか一方に設けられ、ロボット本体10及び移動部20のいずれか他方に対して照射した検出光の反射光を受光する光学式変位センサ50と、光学式変位センサによる反射光の受光結果から、光学式変位センサから検出光が照射された位置までの距離を算出し、当該算出結果に基づいて、ロボット本体10に対して付与される外力の大きさ及び方向の少なくとも一方を取得する制御部70と、を備えている。
(もっと読む)
ロボット装置、ロボット装置の行動制御方法及びプログラム
【課題】 学習対象物の共有(共同注意)を可能として、適切に学習対象物を特定することを可能にする。
【解決手段】 ロボット装置は、学習対象物を特定する学習対象物特定手段として機能するセグメンテーション処理部132及び学習対象物検出部133が特定した学習対象物の情報を連想想起記憶部に記憶し、行動制御部により、新たな検出した物と連想想起記憶部に記憶した学習対象物の情報とに基づいて行動をする。
(もっと読む)
ロボットおよび制御システム
【課題】任意形態の外乱に対して、制御対象の行動目的に鑑みて適当な形態で、当該制御対象を行動させることができる制御システム等を提供する。
【解決手段】周波数帯域の高低に応じて階層化されている複数のモジュールmodiのそれぞれが、自己モジュールが主担当する目的を他のモジュールが主担当する副目的よりも優先させながら、主目的および副目的に適合するロボットRの行動形態の候補である行動候補を探索するように構成されている。低周波の第j+1モジュールにより探索されたロボットRの行動候補よりも、高周波の第jモジュールにより探索されたロボットRの行動候補を優先的に反映させた形でロボットRの行動が制御される。
(もっと読む)
ロボットおよび制御システム
【課題】任意形態の外乱に対して、制御対象の行動目的に鑑みて適当な形態で、当該制御対象を行動させることができる制御システム等を提供する。
【解決手段】周波数帯域の高低に応じて階層化されている複数のモジュールmodiのそれぞれが、自己モジュールが主担当する主目的を他のモジュールが主担当する副目的よりも優先させながら、主目的および副目的に適合するロボットRの行動形態の候補である行動候補を探索するように構成されている。低周波の第j+1モジュールにより探索されたロボットRの行動候補よりも、高周波の第jモジュールにより探索されたロボットRの行動候補を優先的に反映させた形でロボットRの行動が制御される。
(もっと読む)
感性モデル装置、感性モデルの性向学習装置及び方法
【課題】 感性モデルの性向特性を適応的に変化させる装置及び方法を提供する。
【解決手段】 本発明の一態様による感性モデル装置は、性向情報を有している。そして、この性向情報に基づいて感情を生成し、該生成された感情に応じて特定の行動を取ることが可能である。本発明の一態様によって、性向情報は、行動に対するユーザ応答によって適応的に変更される。したがって、ユーザとの相互作用によって感性モデルが能動的に反応しうる。
(もっと読む)
ロボット装置
【課題】予め定められた状況以外の状況においてもユーザに対して適切な情報を提供することが可能なロボット装置を提供すること。
【解決手段】ロボット装置100は、状況情報取得部101と自律動作条件判定部102と自律動作部103と通信実行部104とを備える。状況情報取得部101は、周囲の状況を表す状況情報を取得する。自律動作条件判定部102は、状況情報取得部101により取得された状況情報に基づいて所定の自律動作条件が成立しているか否かを判定する。自律動作部103は、自律動作条件判定部102により自律動作条件が成立していると判定された場合、予め定められた動作を行う。通信実行部104は、自律動作条件判定部102により自律動作条件が成立していないと判定された場合、所定の通信先装置との間で通信を行う。
(もっと読む)
移動ロボット
【課題】物体を運搬するタスクにおいて、ロボットの駆動状態等によって使用する参照データを切り替えることにより、タスクの実行時間を短縮する。
【解決手段】ロボット10は、画像取得を行うためのカメラユニット1と、カメラユニット本体の位置・向きを変えることができる、首・車輪・脚などの駆動部2と、把持対象物認識を行うために駆動部2を制御するロボット制御部3と、カメラユニット1により取得された画像の処理を行う画像処理部4と画像処理を行うための対象物データを登録・格納する認識対象物データベース部5を有しており、駆動部2の状態等によって、参照データ51として特徴の情報量の多いものと少ないもの等、少なくとも2ケース以上用意されたデータについて、いずれを使用するか決定して切り替えを行い、ロボットが移動中でも効率的に対象物認識を行う。
(もっと読む)
ロボット制御システム、遠隔管理装置、ロボット、それらの方法及びプログラム
【課題】本発明は、利用者に対する不適切なアドバイスやナビゲーションを防止できるロボット制御システムを提供する。
【解決手段】利用者と対話可能なロボット10、ロボットと通信網を介して通信接続されロボットを制御する遠隔管理装置110を含む。遠隔管理装置110は、要求に基づき情報提供空間が構築された通信網を通じて外部情報を取得する取得手段112、外部情報に関連するアイテムを決定するアイテム決定手段113、アイテムがロボットの周辺にあるかをロボットに探索させるアイテム探索制御手段114、アイテムを含む情報を告知するように言動条件を決定する言動決定手段115を含む。
(もっと読む)
自動運転装置
【課題】運転対象の設備に対して短期間で連携して動作させることが可能な自動運転装置を提供する。
【解決手段】自動運転装置(1)は、設備(2)に対して相対的に移動可能であり、設備(2)に所定の動作をさせる少なくとも一つの操作スイッチ(22)を操作可能なマニピュレータ(12)と、各動作段階のうち何れの動作段階にあるかを示す表示部(21)を撮影した画像を一定時間間隔で取得する撮像部(11)と、画像から表示部(21)の表示内容を認識することにより、設備(2)の動作段階を識別する動作段階識別部(31)と、動作段階識別部(31)によって識別された設備(2)の動作段階に応じた動作を設備(2)に実行させるように、マニピュレータを動作させて少なくとも一つの操作スイッチ(22)を操作する制御部(33)とを有する。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
移動型ロボット
【課題】移動中の画像処理結果から画像のブレの影響を低減させつつ画像を処理するサンプリング回数を増加させることができる移動型ロボットを提供すること。
【解決手段】ロボットRは、カメラCで取り込んだ画像を処理する画像制御処理部10と、脚部R3の予定着地時期の情報を含む行動計画情報を記憶する主記憶部30と、行動計画情報に基づいてロボットの移動を制御する指令を自律移動制御部50に出力する移動制御部42と、予定着地時期の情報を画像制御処理部10に通知する移動計画情報通知部43とを備え、画像制御処理部10は、予定着地時期に基づいて、着地の前後のタイミングをカメラCからの画像取込時期として決定する画像取込計画処理部11と、画像取込時期になったときに取込トリガを生成してカメラCに出力する取込トリガ生成部13と、画像取込時期に取り込んだ画像を処理する画像認識処理部16とを備える。
(もっと読む)
ロボットの制御プログラム構築方法およびロボットシステム
【課題】 生活空間において,移動ロボットが種々の物品の把持や,会話による動作など,多様な動作を実現するためのロボット制御プログラムの作成において,プログラムの複雑化を抑制し,操作者の負担を軽減できるプログラミング環境を提供する。
【解決手段】 物品の把持シーケンスプログラムを,データベースの物品情報ごとに記憶し,ロボット10の制御プログラムの実行時に,把持対象物品の電子タグ情報を電子タグリーダ13で読み取り,その電子タグ情報をキーとしてデータベースより該物品の把持シーケンスを取得し,ロボット制御プログラムに挿入する,という手順で処理する。
(もっと読む)
走行ロボット
【課題】監視巡回する走行ロボットにおいて、カーブを支障なく通り抜けるとともに、不審者でない小動物を不審者と誤認することがない走行ロボットを提供する。
【解決手段】巡回ルートのカーブにさしかかると、走行ロボットはカーブ入り口標識を検出し、レーダを起動させ進行方向の左右にレーダ波を送出する。このレーダ波の反射によって左右の通り抜け可否を判断し、進行方向を変える。また焦電センサで小動物らしき熱源を検出したら、走行ロボットは搭載しているレーダとカメラを起動しこの情報を無線で警務者に送出する。警務者は小動物であると判断したら走行ロボットにレーダの停止と警報をオフする命令を送出する。
(もっと読む)
自律動作機器のための自律動作機器制御システム
【課題】自律動作機器を動作させるための情報を、データ通信負荷が低い形態で共有する自律動作機器制御システムを提供することを目的とする。
【解決手段】自律動作機器の状態と前記状態で発動する動作とを対応付けた自律動作ルールに基づいて自律的な動作を行う第一の自律動作機器が、前記自律動作ルールを保持する第一の自律動作ルール記憶手段を参照し、前記自律動作ルールの少なくとも一部を複写自律動作ルールとして送信する自律動作ルール送信手段を備えることを特徴とする。
(もっと読む)
自律動作機器、自律動作機器制御システム、及び、自律動作機器制御方法、並びに、自律動作機器制御プログラム
【課題】機器がおかれた状態と発動する動作を対応付けるための制御プログラム、すなわち機器がおかれた状態と発動する動作を対応付けた自律動作するためのルール(以下、自律動作ルール)をプログラムベースで記述することは、プログラムする者の負荷が高く、また、プログラムスキルも要求される。
【解決手段】自律動作ルールに基づいて自律的に動作する自律動作機器において、所定の動作を指示された際に、前記自律動作機器の状態と前記指示された動作とを対応づけた自律動作ルールを生成する自律動作ルール生成手段を備える。
(もっと読む)
1 - 20 / 101
[ Back to top ]