
Fターム[3C007WB18]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 外部情報を利用するもの (521) | 人からの指示 (108)
Fターム[3C007WB18]の下位に属するFターム
音声入力 (76)
Fターム[3C007WB18]に分類される特許
1 - 20 / 32
サービス提供システム及びサービス提供方法
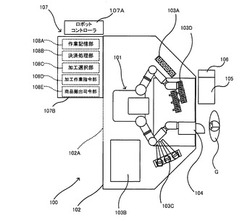
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
操作指示認識装置及びロボット

【課題】特定の人物のみが確実に操作指示を行うことができ、それ以外の人物による操作指示を禁止する。
【解決手段】操作指示認識装置は、撮像を行い、対応する画像データを出力するカメラ14を有するとともに、カメラ14から出力された画像データに含まれる人物1の手2の領域を検出し、対応する手領域データを生成する手領域検出処理G2を実行し、手領域検出処理G2により生成された手領域データに基づき、手2の領域を検出した人物1が、予め定められた特定の人物1であるかどうかを判定する人物判定処理G3を実行し、人物判定処理G3による判定が満たされた場合に、手領域検出処理G2において生成された手領域データに基づき、特定の人物1の操作指示に対応した特定の手2の姿勢を判定する指示判定処理G4と、を実行する。
(もっと読む)
ロボットの遠隔操作システム
【課題】連続的に作業指示を行うことができるロボットの遠隔操作システムを提供する。
【解決手段】本発明のロボットの遠隔操作システム1(1000)は、第1の撮像手段110(410)と、作業指示手段120(420)と、ロボット200と、を備える。作業指示手段は、第1の撮像手段の位置情報、作業対象物が含まれるように撮像された画像情報、作業対象物に対して実行させる作業指示情報をロボットに送信する。ロボットは、作業指示手段から受信した第1の撮像手段の位置情報に基づいて移動し、周辺情報取得手段250、260でロボットの周辺の情報を取得し、取得した周辺情報と作業指示手段から受信した画像情報との照合結果から作業対象物の位置情報を取得し、取得した位置情報に基づいて作業対象物に近づき、作業指示手段から受信した作業指示情報に基づく作業を作業対象物に対して実行する。
(もっと読む)
ロボット装置、ロボット装置の制御方法およびプログラム
【課題】ユーザとロボットの間で対象に関する共同注意の成立を補助可能な、ロボット装置、ロボット装置の制御方法およびプログラムを提供する。
【解決手段】対象Oに関する共同注意の成立をロボット100に促すための指令をユーザ10から取得するコマンド受信部151と、指令の取得に応じて、光束Lの照射により対象を指示するためにユーザにより操作されるポインタ200の位置および姿勢を推定する位置姿勢推定部159と、位置および姿勢の推定結果に基づき、光束の照射により指示されている対象の方向を特定し、方向の特定結果に基づき、周辺環境を表す環境地図EM上で対象を特定する対象特定部160とを備える。
(もっと読む)
自律移動装置および作業決定方法
【課題】ユーザから提示された物体を認識し、当該物体を用いて実行する作業内容を決定することが可能な自律移動装置を提供する。
【解決手段】本発明の自律移動装置は、所定の作業を行うために動作する動作部と、ユーザからの指示に基づいて、実行する作業を決定する作業決定部と、作業決定部により決定された作業内容に基づいて、動作部の動きを制御する制御部と、を備える。作業決定部は、ユーザから提示された物体を識別するための物体情報を取得する情報取得部と、情報取得部により取得された物体情報に基づいて、物体を識別する物体識別部と、物体と、当該物体を使用して行う作業内容とを関連付けて記憶する作業記憶部と、物体識別部により識別された物体に基づいて、作業記憶部から識別された物体を用いて行う作業内容を決定する決定部と、を備える。
(もっと読む)
制御装置、制御方法およびプログラム
【課題】ユーザとのインタラクションを介してロボットの周辺情報を更新し、ロボットへの指示を簡便化する。
【解決手段】制御装置100は、移動体に所定の処理を実行させる実行部108と、前記移動体が移動可能な領域の環境地図を記憶している記憶部104と、前記移動体の周辺情報を検出する検出部102と、前記検出部により検出された前記移動体の周辺情報に基づいて、前記環境地図を更新する更新部106と、ユーザ入力に応じて、ユーザの指示を示す指示情報を取得する取得部110と、を備え、前記実行部108は、前記環境地図を参照して、前記移動体に前記指示情報に基づく処理を実行させ、前記更新部106は、前記指示情報および前記指示情報に基づく前記移動体により実行される処理をもとに前記環境地図を更新する。
(もっと読む)
ロボット制御装置、ロボット制御方法、ロボット制御プログラム、及びロボット
【課題】人間との接触を前提とするロボットに対して、安全かつ柔軟に人間とロボットとの接触を実現するロボット制御装置、ロボット制御方法、ロボット制御プログラム、及びロボットを提供すること。
【解決手段】食器(目標物)に接近する動作を行うロボットアーム(動作本体)11を有してユーザーと接触するロボット10の動きを制御するロボット制御装置15であって、ユーザーの撮像情報に基づき、ユーザーの周囲に複数の領域を生成する安全度生成部27と、複数の行動パターン別に食器又はユーザーに対するロボットアーム11の位置、姿勢及び移動軌跡を算出するとともに、複数の領域におけるロボットアーム11の各動作速度を規定する行動指示部30と、行動指示部30の指令に基づき、ロボットアーム11の動作を制御する動作制御部31と、を備えている。
(もっと読む)
情報提供装置
【課題】ユーザの意思を反映した適切な情報提供を行う。
【解決手段】腕部移動量検出系36により検出される、腕部30が物体(絵画等)を指し示すために移動した移動量と、ロボット位置検出系24により検出されるグローバル座標系上における情報提供ロボットの位置及び向き(回転)と、に基づいて、腕部30の手先が指し示す方向のベクトル及び手先位置(ベクトルの始点)をグローバル座標系上にて算出し、この算出結果と、物体の位置座標データとに基づいて、物体特定部56が、腕部30の手先が指し示している物体を特定し、情報提供部58が特定された物体の情報をユーザに提供する。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
ロボット操作装置及びロボット操作システム
【課題】移動経路に自由度を持たせながらも、ユーザによる移動位置の指定操作が煩雑になるのを防止することが可能なロボット操作装置等を提供する。
【解決手段】ロボットに動作指示を与え、ロボットを動作させるためのロボット操作装置であって、ユーザが操作をする操作入力部102と、操作入力部102の操作によってユーザから入力された動作指示の履歴を蓄積するベースポイントデータベース105と、ベースポイントデータべース105に蓄積された動作指示の履歴に基づいてロボットが次に動作する動作候補を複数生成する動作候補生成部108bと、動作候補生成部108bで生成された複数の動作候補をユーザにより選択可能に提示する情報提示部103とを備えたものである。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
自律動作機器のための自律動作機器制御システム
【課題】自律動作機器を動作させるための情報を、データ通信負荷が低い形態で共有する自律動作機器制御システムを提供することを目的とする。
【解決手段】自律動作機器の状態と前記状態で発動する動作とを対応付けた自律動作ルールに基づいて自律的な動作を行う第一の自律動作機器が、前記自律動作ルールを保持する第一の自律動作ルール記憶手段を参照し、前記自律動作ルールの少なくとも一部を複写自律動作ルールとして送信する自律動作ルール送信手段を備えることを特徴とする。
(もっと読む)
ロボット操作入力装置およびそれを備えたロボット
【課題】操作者の動作に追従するようにロボット脚を操作することのできるロボット操作入力装置を、従来よりも少ない数のセンサにて実現する。
【解決手段】ロボット操作入力装置は、歩行可能な脚2を有するロボット1の当該脚2を操作するための入力装置である。ロボット操作入力装置は、操作者100の足115を支持する足支持部材32と、足支持部材32と一体化されまたは足支持部材32に取り付けられ、操作者100のくるぶしに追従して動く追従部材31と、追従部材31に取り付けられた6軸力覚センサ20と、を備えている。
(もっと読む)
施設を整備するロボットと実時間または近実時間で相互作用する方法
本発明の態様によれば、整備ロボットとそのようなロボットを制御するための方法が提供される。詳細には、ロボットは、人の存在を検出し、人の存在の検出に応じて次の行動を取るように構成される。例えば、ロボットは、領域から出るか、人からの命令を待つか、人が出るまで遊休またはスリープ状態またはモードになる。 (もっと読む)
ロボット制御システム
【構成】ロボット制御システム10はロボット12を含み、このロボット12は、コミュニケーション行動の動作履歴情報を中央制御装置14に送信する。中央制御装置14は、ロボット12からの動作履歴情報のうち遠隔操作によるものに基づいて、個人用ビヘービア遷移DB,年代・性別依存ビヘービア遷移DBおよび場所依存ビヘービア遷移DBを構築する。そして、ロボット12は、対話相手の名前、年代・性別、または場所に応じたDBを選択し、選択したDBを参照して、現在のロボット12の動作を示すコマンドと、そのロボット12の動作に対する対話相手の行動とに一致する動作履歴情報に基づいて、次のコミュニケーション行動を決定する。
【効果】遠隔操作の動作履歴情報に基づいて自律行動を行うので、オペレータの遠隔操作の回数をできるだけ減らすことができる。
(もっと読む)
ペット型ロボット
【課題】散歩するペット型ロボットが共に散歩する人間から遠く離れてしまい交通の妨げとなったり、通行人の通行の障害にならないようにして、散歩する人間の足元近くに位置して共に散歩行動することのできるペット型ロボットを提供する。
【解決手段】通信部を介したユーザの指示に基づいた指示信号によるペットロボット本体の方向性、スピード調整および停止、並びにペットロボット本体が犬締結ヒモ程度の長さの範囲を越えることを示す信号を入力してペットロボット本体を一時停止させる制御を行う行動制御信号を生成させ、行動制御信号によって行動駆動部を駆動制御してペットロボット本体をユーザから犬締結ヒモ程度の範囲で散歩行動させる人工知能部を有する。
(もっと読む)
防犯ロボットシステム及び防犯ロボットによる監視方法、警告方法
【課題】
解決しようとする課題は書店、スーパマーケットなどの店舗での万引き等の被害発生の可能性のある不審者を特定し、顧客と区別しながら、不審者を監視して警告を行なう防犯システムが無いことである。
【解決手段】
固定及びロボットに装着した監視カメラによる撮影映像から特定し、登録した不審者を自律移動ロボットによる巡回、及び特定位置で監視を行うと共に、撮影した不審者の映像を過去の映像と併せての表示、あるいは音声での警告などを行ない、店舗内での防犯を行なう。
(もっと読む)
ロボットシステム
【解決手段】ロボットシステム10は身体動作の実行ロボット14を含み、モーションキャプチャシステム16を用いて操作者の動作を計測し、ロボット制御装置12により操作者の動作をロボット14に再現させる。分解済動作DB18は各人間に対応付けて、特定動作を複数の人間に共通の動作成分から構成される一般動作と或る人間に特有の動作成分から構成される癖動作とに分解して記憶している。ロボット14の遠隔操作を行うときには、操作者は、分解済動作DB18に記憶した人間の中から、癖動作を使用する人間を指定する。ロボット制御装置12は、操作者の動作に対応する一般動作と指定された人間の癖動作とを合成した動作をロボット14の動作コマンドに変換し、その動作コマンドをロボット14に送信する。ロボット14は送信された動作コマンドに基づいて自身の身体動作を制御する。
【効果】ロボットはその身体動作において特定の人間の個性や雰囲気を表現できる。
(もっと読む)
作動装置
【課題】操作者による手動操作や音声操作を用いることなく指令情報を入力することができ、操作者の意図する通りに作動させることができる作動装置を提供する。
【解決手段】ロボット10は、ロボット10の前方の床面の所定の位置において物体を検出するレンジセンサ17と、同床面上にロボット10が実行する作動の内容を表した作動メニューMを表示するプロジェクタ20と、これらレンジセンサ17およびプロジェクタ20の各作動を制御するとともに所定の作動内容を実行するコントローラ30とを備えている。レンジセンサ17は、作動メニューMの前面を含むようにレーザ光を走査して測長信号をコントローラ30に出力する。コントローラ30は、測長信号が表す作動メニューM上における物体の位置を用いて、同位置に対応する作動内容を実行する。
(もっと読む)
ロボット装置
【課題】複数の任務を並列に効率よく行い、オフィスロボットや家事ロボットとして依頼された任務を期限内に遂行する。
【解決手段】内部資源2を使用して受付手段6で受け付けた任務を行動するロボット装置1において、複数の任務が受け付け可能とされた受付手段6と、任務を遂行するための行動と任務を並列に行う場合の内部資源2の使用条件とを任務シナリオとして複数記憶した任務記憶手段5と、任務を受け付けた場合、受け付けた任務の行動と使用条件とを任務記憶手段5から読み取り、使用条件に関連して任務シナリオの実行順序を決定する実行順序計画手段9と、を備え、実行順序計画手段9により決定された実行順序に従って行動する。
(もっと読む)
1 - 20 / 32
[ Back to top ]