
Fターム[3C007WB26]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型の制御 (1,266) | 行動制御(感情も含む) (795) | 行動の仕方そのもの (103)
Fターム[3C007WB26]の下位に属するFターム
具体的な感情表現方法 (27)
Fターム[3C007WB26]に分類される特許
1 - 20 / 76
移動体
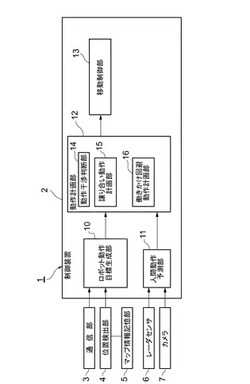
【課題】効率良く与えられたタスクを行うことができる移動体を提供する。
【解決手段】本発明に係る移動体1は、移動障害物を検出する移動障害物検出手段6,7と、移動障害物と移動体1とが所定間隔以内に接近するか否かを判定する接近判定手段14と、移動障害物と移動体1とが所定間隔以内に接近すると判定した場合に、標準回避動作Cを計画する標準回避動作計画手段15と、標準回避動作Cに基づいて、移動体1が移動障害物を回避する回避動作と移動障害物に回避を促す働きかけ動作とを兼ねる働きかけ回避動作Eを計画する働きかけ回避動作計画手段16と、働きかけ回避動作Eに基づいて移動体1を制御する制御手段13と、を備え、働きかけ回避動作計画手段16は、標準回避動作Cにおける動作変化の速度及び動作変化の変化量のうち少なくとも一方を大きくした回避動作を働きかけ回避動作Eとして計画する。
(もっと読む)
案内ロボット、案内方法、及び案内制御用プログラム

【課題】対象を指し示す動作を適切なアームで行うと共に、データ容量の削減を図る。
【解決手段】案内情報の出力に合わせて対象を指し示す動作を含む第1のジェスチャを行うための関節機構の少なくとも回転方向及び回転量を規定するデータであって、第1のアーム部14の軸構成に適合するように構成された第1のジェスチャデータ21を記憶し、位置関係と第1のジェスチャにおけるアーム部の移動方向とに基づいて第1のジェスチャを第1のアーム部14又は第2のアーム部15のどちらで実行するかを決定し、第2のアーム部15が第1のジェスチャを行う場合に第1のジェスチャデータ21を鏡像反転させる。
(もっと読む)
電子機器
【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
触覚提示付ロボット
【課題】 ユーザの状況に応じた多様な情報を擬人的かつ触覚的に提供する。
【解決手段】 触覚提示付ロボット10は、ロボット本体10Aおよびこれをユーザに装着するためのベルト10Bを備える。ロボット本体10Aにはユーザに対して視覚的および聴覚的に作用する視聴覚アクチュエータ(36−56)が、ベルト10Bにはユーザに対して触覚的に作用する触覚アクチュエータ(74−78)が設けられ、そしてユーザの位置,動き,環境,バイタルサインなどを検知するセンサ(62−70,80)がロボット本体10Aおよびベルト10Bに設けられる。コンピュータ(30)は、ユーザの状況をセンサで検知し(S3−S21)、状況に応じた情報をユーザに対して視聴覚アクチュエータおよび触覚アクチュエータで擬人的かつ触覚的に提示する(S25−S33,S37−S41)。
(もっと読む)
コミュニケーションロボット開発支援装置
【構成】 コミュニケーションロボット開発支援装置(10)は、コミュニケーションロボット(12)の開発を支援するためのものである。シーケンス表示手段は、行動モジュールの遷移を最上位であるメインシーケンスとそれより下位のサブシーケンスとに階層化し、メインシーケンスに対応するメインシーケンス画面312とサブシーケンスに対応するサブシーケンス画面314とをそれぞれ個別に表示する。たとえば、メインシーケンス画面312では、行動モジュールに対応するビヘイビアアイコン304、サブシーケンスに対応するシーケンスアイコン320、およびアイコン間を連結して行動モジュールの実行順序を示す遷移線306に基づいて、メインシーケンスが作成される。また、たとえば、サブシーケンス画面314では、ビヘイビアアイコン304と遷移線306とに基づいて、サブシーケンスが作成される。
【効果】 複雑な行動モジュールの遷移を簡単に設定することができる。
(もっと読む)
道案内ロボット
【構成】道案内ロボット(10、100)は複数の文を発話して利用者に道を案内するものである。そして、時間決定手段(62、S19、S69)は文の内容を利用者が把握するために必要な時間を決定する。また、発話手段(62、72、54、S35、S41、S85、S97)は文の発話の完了後に、時間決定手段が決定した時間の後で次の文を発話する。
【効果】道案内ロボットによる道案内の内容を利用者が正しく充分に把握することができる。
(もっと読む)
ロボット及びロボットの作業実行方法
【課題】エラー発生時に運用停止を回避する。
【解決手段】動作指示手段1aは、作業記述情報記憶手段2に記憶される作業記述情報を読み出し、動作指示情報に定義される動作を駆動部3に指示して実行させる。動作が正常完了しなかったときは、必須動作判定手段1bが、未完了の動作が所定のサービスを実行するために必須かどうかを判定する。必須でないときは、動作状態をスキップに遷移させる。スキップは、未完了の動作の動作単位の動作が行われている間は、継続される。スキップ処理手段1cは、作業記述情報に基づいて未実行の動作状態の動作を実行させる。しかし、動作指示情報に定義される対象の駆動部3が未完了の動作の駆動部3の種別と同じときは、この動作をスキップさせる。
(もっと読む)
人型ロボット
【課題】特定個人に似顔、似声により情報を伝達する人型ロボットにおいて、音声を発する際の動きのなかに、特定の話者の個性を表現することにより、話者が伝達しようとする愛情などを演出できる人型ロボットを提供する。
【解決手段】特定個人に似顔のロボット本体(1)の内部に搭載したストレージ(3)にあらかじめ特定個人の声を収録し発話するために必要となる五十音等の音素データや特定個人の癖となる動作データ等を登録し、発話時にその音声を制御部(2)内のメインCPUユニット(211)により合成して、スピーカ(26)より出力し、同時にアクチュエータ(9)〜(25)を四肢動作させる。
(もっと読む)
コミュニケーションロボット
【課題】ユーザに対して、必要なタイミングでタッチパネルへ注目してもらうことを促進する。
【解決手段】コミュニケーションロボット11は、頭部12,胸部13,胴部14,腕部15を有して自立走行する。腕部15にはタッチパネル17を備えている。ユーザに対して、積極的にタッチパネル17を注目してもらうときには、腕部15の向きや形状を制御して、タッチパネル17の表示面をユーザ側に向け、注目を外してもらうときには、腕部15の向きや形状を制御して、タッチパネル17の表示面をユーザから外した方向に収納する。
(もっと読む)
行動推定システム
【課題】インストラクタの行動態様の推定精度の向上を図ることができるシステムを提供する。
【解決手段】行動推定システム100によれば、インストラクタの動きを表わす基準軌道Pの特徴点の位置と、基準軌道Piの複数の形状特性のそれぞれを表わす複数の「第1モデル」のそれぞれとに加えて、状態変数の位置p(k)、変位速度v(k)およびその時間微分値α(k)が連続的に変化するようなインストラクタの動作を表わす「第2モデル」に基づき、エージェントの行動制御基礎となる推定軌道Qiが生成される。また、推定軌道Qiが特徴状態変数またはその近傍範囲を通過するという条件が満たされるように許容されている第1モデルの揺らぎが最小で安定度が最高の第1モデルに対応する行動態様がインストラクタの行動態様として推定される。
(もっと読む)
動作生成装置、ロボット及び動作生成方法
【課題】発話内容に応じて身振り動作の処理速度を調整する動作生成装置を提供する。
【解決手段】動作生成装置20は、発話内容と発話内容に応じて動作パターンが動作する動作タイミングを保持する発話内容データベース2と、動作パターンに対応する動作データを登録する動作パターンデータベース8と、発話内容データベース2から発話内容を選択する発話内容生成部3と、選択された発話内容に応じて、説明に必要な動作パターンを判断する動作種別判断部7と、判断された動作パターンに基づいて、動作パターンデータベース8から動作データを抽出し、発話内容と動作データとを組み合わせる動作パターン組合わせ生成部9と、発話内容に応じた動作タイミングに基づいて、動作データの再生処理速度を調整する動作処理速度調整部10と、を備える。
(もっと読む)
ロボット、タスク実行システム
【課題】タスクの状態が変化した場合でもタスクの実行経済の観点から適切な状態においてタスクを実行することができるロボット等を提供する。
【解決手段】ロボットにおいて新規タスクを実行するために要する負荷または労力を表わすコストが評価され、このコストを表わすコスト情報がサポートサーバ200に送信される(入札手続)。さらに、サポートサーバ200においてコストが最低のロボットが指定され、指定されたロボットに対して当該新規タスクの実行指令が送信され、当該ロボットがこの実行指令にしたがって当該タスクを実行する(落札手続)。このようなタスクの入札および落札方式が採用されることにより、複数のロボットRのうち指定タスク実行経済に鑑みて適当なロボットRにより指定タスクが実行される。
(もっと読む)
ロボット制御システム、ロボット、プログラム及び情報記憶媒体
【課題】ロボットを介したユーザ間の間接的なコミュニケーションを実現できるロボット制御システム、ロボット、プログラム及び情報記憶媒体を提供する。
【解決手段】ロボット制御システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つからのセンサ情報により得られるユーザ情報を取得するユーザ情報取得部と、取得されたユーザ情報に基づいてロボットがユーザに対して提示する提示情報の決定処理を行う提示情報決定部と、提示情報をユーザに対してロボットに提示させるための制御を行うロボット制御部とを含む。ユーザ情報取得部は、第2のユーザのユーザ情報である第2のユーザ情報を取得し、提示情報決定部は、取得された第2のユーザ情報に基づいて、第1のユーザへの提示情報の決定処理を行う。ロボット制御部は、第2のユーザ情報に基づき決定された提示情報を第1のユーザに提示するためのロボット制御を行う。
(もっと読む)
ロボット遠隔操作システム
【構成】ロボット遠隔操作システム10は、ネットワーク100を介して接続された、ロボット12a,12b,中央制御装置14および操作端末16a〜16cを含む。ロボット12a,12bは、自律制御だけで対応することが難しい事態になった場合に、オペレータの呼出要求を中央制御装置14に送信する。中央制御装置14は、呼出要求を受信すると、ロボット12a,12bの対話相手の音声から作成した条件リストに基づいて、対話相手が要求する条件を満たす1人または複数のオペレータを選択する。すると、当該選択された1人または複数のオペレータは、操作端末16を用いてロボット12a,12bを遠隔操作する。
【効果】ロボットの対話相手の要求する条件に合う1または複数のオペレータによってロボットを遠隔操作するので、その要求に適切に対応することができる。
(もっと読む)
ロボット制御システム、ロボット、プログラム及び情報記憶媒体
【課題】ユーザの行動や状況を反映したロボット制御を実現できるロボット制御システム、ロボット、プログラム及び情報記憶媒体の提供。
【解決手段】ロボット制御システムは、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つからのセンサ情報により得られるユーザ情報を取得するユーザ情報取得部と、取得されたユーザ情報に基づいてロボットがユーザに対して提示する提示情報の決定処理を行う提示情報決定部と、提示情報をユーザに対してロボットに提示させるための制御を行うロボット制御部を含む。提示情報決定部は、取得された同じユーザ情報に対して第1、第2のロボットが異なる提示情報を提示するようにユーザに対して提示する提示情報の決定処理を行う。
(もっと読む)
コミュニケーションロボットとその動作方法
【課題】サービスを依頼し易いコミュニケーションロボットを提供する。
【解決手段】眼カメラ20が設けられた頭部52と、広視野カメラ53が設けられた胴部54と、頭部を回転させる頭部制御手段61と、コミュニケーションの成立を合図する合図動作制御手段63とを有するコミュニケーションロボットであって、眼カメラ20及び広視野カメラ53の画像を処理する画像処理手段62を有する。頭部52を所定速度で回転する見回り動作を行いながら、広視野カメラ53の画像から予め検出した人の位置で回転速度を落とし、眼カメラ20の画像からロボットに顔を向ける正面顔の人を検出し、検出した場合に合図を送る。サービスを求める人は、ロボットが見回り動作を行っていれば、サービス可能であると知ることができ、ロボットが自分の方を向いたときにロボットを見ていれば、ロボットにサービスを依頼できる。
(もっと読む)
無線識別技術を電子ロボットの動作系列制御に応用する構造
【課題】無線識別技術を電子ロボットの動作系列制御に応用する構造を提供する。
【解決手段】本発明は無線識別技術を電子ロボットの動作系列制御に応用する構造であり、電子タグのデータを読み取る無線ICタグ読取り装置と、無線ICタグ読取り装置の電子タグデータを受信するとともに、電子タグの内容を解読して、そして電子タグの内容を電子ロボットの対応する行動コードに変換して出力する行動制御部と、行動制御部の出力を受信するとともに、電子ロボットの駆動を行うことで、電子ロボットに対応するアクセサリとのインタラクティブな動作を発生させる駆動部と、を備えている。
(もっと読む)
ペット型ロボット
【課題】散歩するペット型ロボットが共に散歩する人間から遠く離れてしまい交通の妨げとなったり、通行人の通行の障害にならないようにして、散歩する人間の足元近くに位置して共に散歩行動することのできるペット型ロボットを提供する。
【解決手段】通信部を介したユーザの指示に基づいた指示信号によるペットロボット本体の方向性、スピード調整および停止、並びにペットロボット本体が犬締結ヒモ程度の長さの範囲を越えることを示す信号を入力してペットロボット本体を一時停止させる制御を行う行動制御信号を生成させ、行動制御信号によって行動駆動部を駆動制御してペットロボット本体をユーザから犬締結ヒモ程度の範囲で散歩行動させる人工知能部を有する。
(もっと読む)
自律移動装置
【課題】特定の人のそばについて自律的に移動する自律移動装置において、特定の人の安全を確保するように移動することが可能な自律移動装置を提供する。
【解決手段】自律移動装置1は、主人のそばについて自律的に移動しつつ、カメラ10及び通信機12などが認識した周囲環境に物体が存在した場合に、主人に対する物体の危険度を危険度検出部24が検出し、この危険度に基づいてアクチュエータ制御部26及び電動モータ34が当該自律移動装置を移動させる。これにより、自律移動装置1は、主人のそばについて自律的に移動するとともに、主人に対する危険度を検出してこの危険度に基づいて移動するため、この危険度を考慮して主人の安全を確保する移動を行うことができる。
(もっと読む)
移動型ロボット
【課題】複数の可動部または音声出力部のいずれかの部位を使用していない場合にその部位を有効に活用して対話対象の発話を誘発する行動のできる移動型ロボットを提供する。
【解決手段】ロボットは、対話対象の発話を誘発するために実行する対話誘発動作を、1つ以上の部位を使用して対話対象が知覚可能な単独の動作またはその組合せとして各部位に実行させる制御を行う対話誘発動作制御部47と、対話誘発動作とそれを実行するために使用する部位とを関連付けた情報を示す対話誘発動作情報を複数記憶した対話誘発動作情報記憶手段33とを備え、対話誘発動作制御部47は、現在使用中の部位を検出する使用状況検出手段110と、検出された部位と対話誘発動作情報とに基づいて対話誘発動作を決定する対話誘発動作決定手段120と、決定された対話誘発動作に使用する部位に対して動作を実行させる知覚可能動作制御手段130とを有する。
(もっと読む)
1 - 20 / 76
[ Back to top ]