
Fターム[3C007WC03]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | PC等外部機器と接続するもの (46)
Fターム[3C007WC03]に分類される特許
1 - 20 / 46
ロボット制御システム
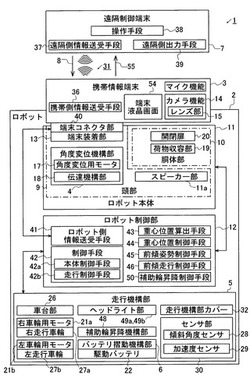
【課題】スマートフォン等の携帯情報端末を利用して遠隔制御を行うロボットを制御するロボット制御システムを提供することを課題とする。
【解決手段】制御システム1は、ロボット2と、無線通信回線31と接続可能な携帯情報端末3と、ロボット2を制御する制御情報8を送出する遠隔制御端末7とを具備する。ロボット2は、携帯情報端末3を着脱自在に装着可能な頭部9及び胴体部10からなるロボット本体11と、ロボット本体11の下方に取設され、一対の走行車輪21a,21bを有する倒立二輪機構を採用した走行機構部5と、遠隔制御端末7から送出された制御情報8を携帯情報端末3を通じて受付け、ロボット2の動作制御及び走行制御を行うロボット制御部12とを具備して主に構成されている。
(もっと読む)
情報提供システム

【構成】情報提供システム100は、中央制御装置10、LRF12およびロボット14を含む。中央制御装置10が備えるメモリ(18)には、ショッピングモール内の店舗などに関するリコメンド情報であるトピックスと、店舗などに向かう大局行動を表わす移動軌跡(P_Tx)が記憶される。ショッピングモール内の人間は、LRF12によって移動軌跡(P)が検出され、最も類似する移動軌跡(P_Tx)が特定される。そして、中央制御装置10は、特定された移動軌跡(P_Tx)に対応するトピックスの発話内容を読み出し、人間の位置と共にロボット14に付与する。ロボット14は、付与されたトピックスの発話内容を発話することで、人間にリコメンド情報を提供する。
【効果】人間は、検出された移動軌跡から大局行動が予測され、予測された大局行動に基づいて、リコメンド情報が提供される。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
自律動作機器のための自律動作機器制御システム
【課題】自律動作機器を動作させるための情報を、データ通信負荷が低い形態で共有する自律動作機器制御システムを提供することを目的とする。
【解決手段】自律動作機器の状態と前記状態で発動する動作とを対応付けた自律動作ルールに基づいて自律的な動作を行う第一の自律動作機器が、前記自律動作ルールを保持する第一の自律動作ルール記憶手段を参照し、前記自律動作ルールの少なくとも一部を複写自律動作ルールとして送信する自律動作ルール送信手段を備えることを特徴とする。
(もっと読む)
楽器演奏ロボットおよび楽器自動演奏方法
【課題】周囲温度の差異、楽器の器差の影響等により発生する音高のずれを自動修正する。
【解決手段】本発明の一態様に係る楽器演奏ロボットは、演奏動作を行い楽器の演奏を行う楽器演奏ロボットであって、演奏動作により演奏した楽器の演奏音を入力するための音情報入力部31と、音情報入力部31に入力された演奏音の音高と基準音高とを比較し、音高のずれを判別する判別部と、判別部で判別された音高のずれに基づいて、演奏動作を修正する修正部とを備える。
(もっと読む)
情報収集システムおよび情報収集ロボット
【課題】RFタグ13の情報を収集するためのタグリーダ31の動作や移動経路を自動的に算出することができる情報収集システム10を提供する。
【解決手段】本発明の情報収集システム10は、二次元地図上の移動可能領域内で、情報収集ロボット30を移動させながら、三次元地図を参照して物体の表面に沿うようにタグリーダ31を移動しながら電波を放射させ、RFタグ13からタグIDを受信した場合に、そのときの情報収集ロボット30の位置をデータ取得位置として記録し、情報収集ロボット30が移動可能な領域内において、記録した全てのデータ取得位置を通過する経路を移動順番として算出する。
(もっと読む)
データ切り出し装置、データ切り出し方法及びデータ切り出しプログラム
【課題】ロボット装置を動かすためのモーションデータをコンテンツの特徴に合わせて容易に生成する。
【解決手段】楽曲データGDを解析してビート位置を検出するとともに、ビート位置により区切られる楽曲データGDの複数のビート区間Btそれぞれのビート区間特徴を得ると、このようにして得たビート区間Btそれぞれのビート区間特徴に応じて、モーションパーツデータをモーションデータMDから切り出し、この切り出したモーションパーツデータに対して、特徴解析情報TIDを付加するようにしたことにより、楽曲データGDの音楽区間毎の特徴に対応する特徴解析情報TIDを有するモーションパーツデータを選ばせることができ、かくして、ロボット装置11を動かすためのモーションデータMDを、楽曲データGDに基づく音楽の特徴に合わせて容易に生成することができる。
(もっと読む)
自律移動装置
【課題】特定の人のそばについて自律的に移動する自律移動装置において、特定の人の安全を確保するように移動することが可能な自律移動装置を提供する。
【解決手段】自律移動装置1は、主人のそばについて自律的に移動しつつ、カメラ10及び通信機12などが認識した周囲環境に物体が存在した場合に、主人に対する物体の危険度を危険度検出部24が検出し、この危険度に基づいてアクチュエータ制御部26及び電動モータ34が当該自律移動装置を移動させる。これにより、自律移動装置1は、主人のそばについて自律的に移動するとともに、主人に対する危険度を検出してこの危険度に基づいて移動するため、この危険度を考慮して主人の安全を確保する移動を行うことができる。
(もっと読む)
ロボットシステム、エディタ端末、およびエディタプログラム
【課題】本発明は、ロボットの動作を記述したプログラムを作成してロボットを動作させるロボットシステム等に関し、ロボットの動作(ビヘイビア)の多様性を確保する。
【解決手段】多数のエディタ端末11、ビヘイビアサーバ12、および多数のロボット13がネットワーク14に接続されており、それら多数のエディタ端末11のそれぞれでロボット13の動作(ビヘイビア)を定義し、その定義されたビヘイビアをビヘイビアサーバ12に蓄積し、各ロボット13をそのビヘイビアサーバ12に蓄積されたビヘイビアで動作させる。
(もっと読む)
移動ロボットシステム
【課題】来訪者に適切に情報を提示することができ、また来訪者の行動パターンに応じた案内サービスを提供することができる移動ロボットシステムを提供する。
【解決手段】外部制御装置3は、施設内に進入した来訪者4の位置・移動速度・加速度のうち少なくとも1つを含む来訪者情報を検出する来訪者検出手段5と、来訪者検出手段5が検出した来訪者情報に基づいて来訪者4の行動を推測する来訪者行動推測手段6と、来訪者情報に基づいて移動ロボット2に対する行動指令を生成するロボット行動決定手段7と、行動指令を無線通信によって移動ロボット2に送信する送受信手段とを備え、移動ロボット2は、送受信手段からの行動指令を受信するロボット送受信手段10と、行動指令に従って移動ロボット2を制御するロボット制御手段を備える。
(もっと読む)
ロボットのモーション編集装置及びそのプログラム
【課題】多関節型ロボットのモーションデータを編集する編集装置に関し、作成したモーションデータを再利用して、新たなモーションデータを作成する。
【解決手段】編集装置(3)は、操作ユニット(36)の操作に応じて、3次元擬似空間(60)でのロボットのモデルの各部位の位置、傾きを変更して、操作ユニット(36)のデータ作成指示に応じて、変更されたロボットのモデルの各部位の位置、傾きから、各関節の角度を計算し、キーフレームデータを作成し、3次元表示のための擬似空間内におけるロボットの状態データを付して、多関節型ロボット(1)に送信する。3次元擬似空間で作成されたデータを再利用して、他のモーションデータを3次元擬似空間で作成できる。
(もっと読む)
健康増進用屋外乗馬ロボットの構造モデル及びその歩行法
【課題】 健康増進用屋外乗馬ロボットの構造モデル、乗馬療法における鞍の位置と姿勢の6自由度の運動機能を実現する方法、逆運動学計算方程、安定な平地歩行法および一定の凹凸と傾斜度がある軽度不整地にも対応できる適応歩行法を提供する。
【解決手段】 健康増進用屋外4足乗馬ロボットは、騎乗者の自発的姿勢調整を誘発するために歩行馬ロボットの胴体を支える下肢には、鞍の前後の動きを実現する股縦関節3と、鞍の左右の動きを実現する股横関節2と、前後軸周りの回転機能を実現する膝関節4と、各関節のアクチュエータと6、アクチュエータを制御する制御装置9と、歩行馬ロボットの各足が任意な角度で着地できる球形の足先5と、胴体の姿勢と歩行情報を獲得するための力センサー7とを備える。
(もっと読む)
移動ロボット及び移動ロボットの制御装置
【課題】移動中に無線基地局との通信が切断される状態を回避する移動ロボットを提供する。
【解決手段】移動ロボットは、予め作成された無線環境マップを利用して、自己位置認識部201によって認識したスタート位置と、管理用コンピュータによって指示された目的位置とによって定められる移動経路上における無線環境マップに記録された無線環境データに基づいて、最大移動速度決定部204によって、移動経路を移動するときの最大移動速度を決定する。そして、移動速度指示部205によって、最大移動速度決定部204で決定した最大移動速度を上限とする移動速度で移動するように移動制御部130に指示し、移動機構を駆動して移動する。
(もっと読む)
移動ロボット、並びに、移動ロボットの制御装置、移動ロボットの制御方法及び移動ロボットの制御プログラム
【課題】無線通信が切断される場所に移動した場合であっても、自律的に無線通信を復旧できる場所に移動することが可能な移動ロボットを提供する。
【解決手段】移動ロボットは、移動領域の地図データと、当該移動領域における無線環境に関連する複数の無線環境データで構成した総合無線環境データとを対応付けた無線環境マップを記憶した記憶部140と、移動領域内における自己位置を認識する位置認識部201と、無線環境の状態を監視する監視部202と、無線通信が切断された状態となった場合に、無線環境マップに基づいて、無線通信の接続が可能な復旧位置を探索する探索手段203と、自己位置から復旧位置までの移動を移動制御部130に指示する移動指示部204aと、を備える。
(もっと読む)
ロボット装置、音楽出力方法及び音楽出力プログラム
【課題】本発明は、ロボット装置の使い勝手を向上させる。
【解決手段】本発明は、可動部2を有するロボット装置1において、受信部3により音楽データを受信して出力部4により音楽として出力しながら、分析部5によりその音楽データを分析すると共に、設定部6により音楽データの分析結果に基づいて、音楽に対応する可動部動きパターンを設定して、駆動制御部7により、当該設定した可動部動きパターンに応じて可動部2を駆動することにより、ユーザに対し多数の音楽データを記憶するように操作させることなく、また何度も異なる音楽データを記憶し直すように操作させることもなく、容易に、より多くの音楽に合わせて可動部2を動かして見せることができ、ロボット装置1の使い勝手を向上させることができる。
(もっと読む)
点検ロボット
【課題】建造物の床下や天井裏等の閉空間において、短時間で点検漏れのない効率の良い点検を実現可能な点検ロボットを提供する。
【解決手段】任意の閉空間を点検するための点検ロボットであって、閉空間内の走行面上を移動するための移動機構120と、撮像時におけるズーム倍率が可変であり、閉空間内の被写体を撮像する回動可能な撮像ユニット13と、撮像ユニットを用いて、被写体を低倍率ズームで自動撮像する第1点検制御部102と、低倍率ズームで自動撮像された被写体の一部又は全部の範囲を、撮像ユニット13を用いて、高倍率ズームで自動撮像する第2点検制御部103とを備え、第1及び第2点検制御部102,103は、移動機構120又は撮像ユニット13の少なくとも一方を制御することで、被写体における撮像位置を順次シフトする。
(もっと読む)
ロボットアームおよびそれを備えるロボット
【課題】必要に応じてボディバルーンを収縮、膨張させ、ロボットの運搬作業を容易に行う。
【解決手段】ロボット10は、ロボットアーム12を含み、パソコン18等から送信される遠隔操作情報に基づいて、自身の動作を制御する。ロボットアーム12は、アームバルーン14および関節部材16を含み、たとえば関節部材16aを介してボディバルーン58に接続される。アームバルーン14およびボディバルーン58は、柔軟な気密シートによって形成され、かつ気体の出し入れを行う空気栓20を備える。この空気栓20から空気を出し入れすることによって、アームバルーン14等は、膨張および収縮が可能である。ロボット10を運搬するときには、アームバルーン14およびボディバルーン58内の気体は抜かれる。すなわち、ロボット10は、バルーンによって形成される部位を収縮させて折り畳む等した状態で運搬される。
(もっと読む)
アンドロイド制御システム
【課題】自然な動作を実行する擬似人間ロボットを提供すること。
【解決手段】アンドロイド制御システム10はアンドロイド12を含み、アンドロイド12は人間の代役として或る場所に配置される。通常、アンドロイド12は、制御装置14の制御に従って、人間との間で対話するなどのコミュニケーションを図る。ただし、アンドロイド12自身が対応できない場合には、その旨を遠隔オペレータに通知する。かかる場合には、遠隔オペレータの指示に従って、アンドロイド12は動作される。また、アンドロイド12は、たとえば、その近傍や周囲に人間が存在しない場合や遠隔オペレータからの指示がない場合には、制御装置14の制御に従って無意識動作を実行する。つまり、瞬きや呼吸のような生理的な動作をしたり、髪を触るなどの癖による動作をしたりする。
【効果】 無意識動作のようなアンドロイド特有の動作を実現できる。
(もっと読む)
自律移動体および情報構築システム
【課題】 観光地などで特定人物を撮影する際、特定人物を撮影した画像の情報を観光地の情報として有効活用することができる自律移動体を提供する。
【解決手段】 モビルロボットRは、特定人物Mを含む画像情報、画像を撮影した際の撮影方向、および自己の位置を送信部18から基地局Bに送信する。基地局Bでは、受信部21で受信したこれらの情報に基づいて、モビルロボットRが撮影した撮影対象を特定し、この撮影対象を観光対象として保存蓄積して観光情報を構築する。
(もっと読む)
自律移動装置と遠隔制御装置の間の通信システムおよび自律移動装置
【課題】複数の基地局の何れかを経由して自律移動装置と遠隔制御装置の間で通信を行う通信システムにおいて、通信を中継する基地局を切換える際の回線断を抑制する。
【解決手段】本発明の通信システムは、自律移動装置と、その自律移動装置と無線を介して通信可能な複数の基地局と、その複数の基地局のそれぞれと通信可能であって、その複数の基地局のうち何れかを経由して自律移動装置との間で通信を行う遠隔制御装置と、その複数の基地局のそれぞれと通信可能であって、その複数の基地局を制御する基地局制御装置を備えている。その自律移動装置は、少なくとも所定の時間間隔で電波を送信する。その基地局制御装置は、自律移動装置からの電波のそれぞれの基地局における受信状態に応じて、遠隔制御装置と自律移動装置の間の通信を中継する基地局を切換える。
(もっと読む)
1 - 20 / 46
[ Back to top ]