
Fターム[3C007WC18]の内容
マニピュレータ、ロボット (46,145) | 自走/自律型のその他の特徴、構成 (746) | 付属品の構成の特徴 (42)
Fターム[3C007WC18]の下位に属するFターム
アクセサリ(例;着ぐるみ) (7)
置台、ステーション (18)
Fターム[3C007WC18]に分類される特許
1 - 17 / 17
移動型ロボットシステム
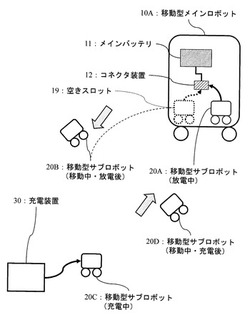
【課題】 自律移動や自律作業が可能な移動型ロボットにおいて、充電による可動範囲の制限や作業内容の制限を受けずに、作業を継続可能な技術を提供する。
【解決手段】 移動して所定の作業を自律的に実行する移動型メインロボット(10A)と、その移動型メインロボット(10A)に対して装着可能であるとともに移動型メインロボット(10A)とは別に移動可能な移動型サブロボット(20A,20B,20C,20D)と、その移動型サブロボット(20C)に対して充電を実行する充電装置(30)とを備える。移動型メインロボット(10A)は、電気エネルギを供給するメインバッテリ(11)を備える。前記移動型サブロボットは、前記の移動型メインロボット(10A)に装着された場合に前記メインバッテリ(11)へ電気エネルギを充電する内蔵バッテリを備える。移動型メインロボット(10A)に装着されていない場合であって内蔵バッテリの電気エネルギが少ない場合には、充電装置(30)へ自律移動して充電する。
(もっと読む)
2足移動体の補助装置

【目的】ロープ状の接続部材の緩み量をできるだけ少なくし、2足移動体が姿勢を崩して転倒しかけた場合、その荷重を支持するときの衝撃を減少させるようにした2足移動体の補助装置を提供する。
【解決手段】2足移動ロボット12にロープ状の接続部材(18)を介して接続されると共に、2足移動体が姿勢を崩したときに2足移動体を上方から支持するリフタ(14)からなる2足移動体の補助装置において、リフタを3次元空間において移動自在なリフタ移動手段(20、22、24、26、28、30)と、リフタ移動手段の動作を制御するリフタ制御部(38)と、3次元空間における2足移動体の位置を検出する検出手段(32、34)とを備えると共に、リフタ移動手段制御手段は、検出された位置に基づいてリフタが2足移動体に追従するようにリフタ移動手段の動作を制御するように構成する。
(もっと読む)
対話支援装置、対話支援方法およびプログラム
【課題】対話を支援する対象者に注意を向けていることを表示するときに、対象者の違和感を緩和できる対話支援装置、対話支援方法およびプログラムを提供する。
【解決手段】動作判定部14は、位置センサ12のデータから対話を支援する対象者の所定の動作を表す情報を取得する。カメラ13および雲台18は、カメラ13を対象者に向けることによって、対象者に注意を向けていることを対象者に向かって表示する。開閉表示部19は、カメラ13のレンズを閉じることによって、対象者に向けている注意を中断していることを表示する。コミュニケーション動作入力部11は、対象者のコミュニケーション動作を表す情報を入力する。注意表示切替制御部15は、対象者に注意を向けている表示と、対象者に向けている注意を中断している表示とを、対象者の動作を表す情報および/または対象者のコミュニケーション動作を表す情報に応じて切り替える。
(もっと読む)
ロボット用のプロテクトサポータおよびカバー
【課題】人間と協働するためにデザインされたロボットのためのプロテクトサポータおよびカバーであって、ロボットの外皮構造を軽量かつ安価に構成することができ、同時に高い安全性と取替え容易性、さらに優れた個体識別性および意匠性を呈する、ロボット用のプロテクトサポータおよびカバーを得ることにある。
【解決手段】プロテクトサポータ21〜24は、人間と協働する産業用ロボットの少なくとも関節を覆い、衝撃吸収性および伸縮性を呈する衝撃吸収部を、伸縮性を呈するシート状の表層部で覆った覆帯部を備え、この覆帯部にファスナを取り付けることで着脱可能に構成することを特徴とし、カバー31は、人間の衣服と素材および形態において親和性を呈する、例えば織布あるいは不織布等で形成した胴部および袖部を備えるものとし、着脱可能に構成することを特徴とする。
(もっと読む)
ロボット及びその安全制御方法
【課題】人間と同様に二足歩行をするロボットが歩行中に倒れても倒れによる被害を最小限に抑えることができるロボット及びその安全制御方法を提供する。
【解決手段】ロボットが倒れることになる場合、倒れる方向に位置しているエアーバッグを作動させながらロボットの姿勢を正姿勢に変更し、倒れによるロボットの機構部損傷を最小化し且つ使用者安全を保護することができ、ロボットが倒れた後に2次倒れが発生する場合には、2次倒れ方向に位置しているエアーバッグを作動させ、2次倒れによるロボットの機構部損傷を最小化できるシステムを提供する。
(もっと読む)
移動ロボットの転倒防止システムおよび転倒防止装置
【課題】移動ロボットの状態に対して自動的に迅速かつ的確に対応する移動ロボットの転倒防止システムを提供する
【解決手段】移動ロボットは、センサにて取得された情報に基づいて周囲の環境地図を作成するとともに自己位置の推定を行う自己位置推定部と、移動の経路を生成する経路生成部と、を備える。転倒防止装置は、移動ロボットの位置情報を取得するロボット位置情報取得部511と、移動ロボットの次の移動経路情報を取得する経路情報取得部512と、これらの情報に基づいて移動ロボットの次の移動位置を算出する追従位置算出部513と、追従位置算出部513にて算出された移動ロボットの次の移動位置に基づいて前記ホイストを移動ロボットに追従させる動作指令を生成するとともにホイスト430に動作指令を与える追従動作指令部541と、を備える
(もっと読む)
移動型ロボットの充電装置
【課題】配線部材を用いて充電中も移動型ロボットを左程の制約を受けることなく動かすことができるようにすると共に、配線部材の損傷といった不具合の発生も防止できるようにした移動型ロボットの充電装置を提供する
【解決手段】充電用電源3と、充電用電源2を制御する制御基板4と、充電用電源4からの電力を移動型ロボット1のバッテリ1bに給電する、移動型ロボット1に接続されて該ロボットに連れ動きする配線部材5とを備える。また、配線部材5の引張りを検出する検出器7を設ける。配線部材5が引張られたときは、引張り検出器7からの信号で移動型ロボット1を停止させたり、配線部材5をロボット1から離脱させる等の適宜の対策を講ずる。
(もっと読む)
ロボット
【課題】
小型の人型ロボットにおいて、移動および作業を確実に行うために、外部情報を得るためにカメラを備えたものが有る。人型ロボットであると頭部や胸部等の高い位置にカメラを備える方が得られる情報が多くなるが、頭部に設けた場合、頭部を支持する首部の可動領域に依存しなければならない。また胸部にあっては視野が限られてしまう。
【解決手段】
ロボットの頭部の前面上部の曲面に沿って移動可能な台座を設け、台座に2台のカメラを搭載する。カメラは、ロボットの頭部の幅とほぼ等しい間隔で左右に離し、カメラ前端が頭部の前端に一致し、かつロボットの上端近くに位置するように配置する。
(もっと読む)
耐盗難自律移動ロボット及び盗難対策方法
【課題】盗難などのトラブルと判断して所定の連絡先に通知してトラブルを回避することが可能でまた、従来不充分であったトラブル判断時の保持情報を保護することが可能とする。
【解決手段】自己が保持している自己の位置情報と外部を参照して得た位置情報が異なると認識した場合、あるいはロボットの機能を妨害していると認識した場合は盗難等のトラブル発生と認識して所定の連絡先に通知、及び保持情報を消去することにより、トラブルの回避、保持情報の保護を行なう。
(もっと読む)
移動性能試験装置
【課題】試験装置の動作をロボットの動作に調和させながら当該ロボットの移動性能を試験しうる装置を提供する。
【解決手段】本発明の移動性能試験装置1によれば、ロボット動作計画に基づいてモータ動作計画が作成され、当該モータ動作計画にしたがってモータ12の動作が駆動される。これにより、エンドレスベルト11の駆動速度変化パターンが、当該エンドレスベルト11の上で移動性能が試験されているロボット2の移動速度変化パターンに応じて制御されうる。そして、エンドレスベルト11の動きのテンポがロボット2の動きのテンポに歩み寄るように、両者の動きのテンポの調和が図られ、この状態で当該ロボット2の移動性能が安定に試験されうる。
(もっと読む)
脚式移動体
【課題】
脚式移動体において、その移動中に搭乗者が移動中に感じる乗り心地を向上させる脚式移動体を提供すること。
【解決手段】
搭乗者を載置する載置部と、搭乗者の指示する方向に載置部を移動するための脚部と、搭乗者を載置した載置部の重心位置に基づいて、載置部が安定して移動するように脚部の動きを制御する制御部と、を備えた搭乗型の脚式移動体において、載置部内に、搭乗者の指示する移動方向に直交する水平方向について揺動可能な揺動部を設け、前記水平方向について、載置部が移動する移動量を抑制するように、揺動部を揺動させるように制御可能に構成した。
(もっと読む)
人工耳を有するロボットヘッド
【課題】人工耳を有するロボットヘッドを提供すること。
【解決手段】ヘッドは、それぞれ耳介形状の構造体およびマイクロフォンを備える人工両耳を指示する。聴覚の位置測定手掛りを高めるために、ヘッドの少なくとも上側部分は音響的減衰表面をもたらす。
(もっと読む)
移動体および移動体制御システム
【課題】姿勢変更可能な移動体がどのように姿勢を変更しても、確実に良好な通信状態を得ることができる移動体および移動体制御システムを提供すること。
【解決手段】無線による信号受信用のアンテナが取り付けられた、姿勢変更可能な移動体において、移動体の取り付け面に対して自由な傾斜度合いを取り得るようにアンテナを揺動自在に取り付けるとともに、前記アンテナを、移動体のとる姿勢に関わらず、鉛直方向に対して一定の方向となるように、その傾斜度合いを制御するようにし、移動体に対して信号を発信する信号発信機に固定された信号受信用のアンテナと、移動体に取り付けられた信号受信用のアンテナとが一定の相対的な位置をとらせるため、移動体の姿勢に関わらす、常に良好な通信状態を得る。
(もっと読む)
状態提示機能付ロボット装置
【課題】 専門知識のない人や聴覚障害のある人でも、装置の状態を容易に認識でき、安全に空間を共有できるロボット装置を提供する。
【解決手段】 本発明の状態提示機能付ロボット装置は、胴部1に設けられ物体を把持するマニプレータ部と、センサ部7と、予め記憶された音データや音合成によって人間に音で状態を通知する発音部8と、各部の動作を制御する制御部4とを備え人間と作業空間を共有して作業するもので、胴部およびマニプレータ部の表面を覆う装置カバー部2と、装置カバー部の表面に設けられた温度変色部材5とを備え、温度変色部材の変色およびセンサ部の入力情報に基づく発音部の発声により装置の状態を提示するものである。
(もっと読む)
関節機構安全保護装置
【課題】関節機構を有する機械において、機械の機能を維持しつつ、関節機構による人などの挟み込み危険、蹴飛ばし危険を極力防止する、関節機構に対する安全保護装置を提供することを目的とする。
【解決手段】挟み込み危険、蹴飛ばし危険を有する関節機構に対し、これを覆うカバー1を設け、関節機構の動きに合わせてそのカバーの開口部3の向き、大きさ、形を変化させて、関節機構の外部露出を必要最小限にとどめることにより安全を確保する。
(もっと読む)
人型ロボットおよび着脱可能型臀部
【課題】 稼働環境や用途に適した臀部を備えた実用性の高い人型ロボットを提供することを目的とする。
【解決手段】 人型ロボット101の下部胴体104の背面に稼働環境や用途に応じて、着脱可能型臀部301を適宜装着する。例えば、椅子に座るのに適した構造を有する着脱可能型臀部301を用意し、これを人型ロボット101の下部胴体104の背面に装着する。こうすることで、重機等の運転席500において、人型ロボット101を椅子501に座らせ、手足を使った運転操作を行わせることができる。また、人型ロボット101に通常の椅子504に安定して座ることができる機能を与えることができる。この発明によれば、着座する機能に優れた実用性の高い人型ロボットを得ることができる。
(もっと読む)
脚式歩行ロボットの充電システム
【課題】外部電源により、該脚式歩行ロボットの電気負荷に必要な電流供給を維持しながらバッテリに充電電流を供給できる充電システムを、簡易な構成且つ低コストで提供する。
【解決手段】バッテリ81の正極83aから電気負荷80への方向を順方向として導通する第1のダイオード85と、外部電源60の正極66aから電気負荷80への方向を順方向として導通する第2のダイオード86と、外部電源60の正極66aからバッテリ81への方向を順方向として導通する第3のダイオード95と、外部電源60の負極66bとバッテリ81の負極83bと電気負荷80の負入力端子84bとを導通する回路とを有する接続回路と、外部電源60の出力電圧をバッテリ81の満充電時における電極間電圧と第3のダイオード95の順方向電圧の合計よりも高くすると共に、出力可能電流を電気負荷80の必要電流よりも大きくする出力電力制御手段とを備える。
(もっと読む)
1 - 17 / 17
[ Back to top ]