
Fターム[3C007XG06]の内容
マニピュレータ、ロボット (46,145) | マイクロマニピュレータの構成、目的 (116) | 操作部 (17)
Fターム[3C007XG06]に分類される特許
1 - 17 / 17
微小マニピュレータ、及びそれを備えた観察装置
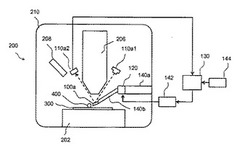
【課題】微小マニピュレータ自体の振動を軽減することで、微小な試料を確実に操作できる微小マニピュレータ、及びそれを備えた観察装置を提供する。
【解決手段】試料300(400)を把持するための対向する一対のアーム71と、アームを支持するベース部11と、ベース部に取り付けられてアームを開閉させる開閉アクチュエータ35とを有するマニピュレータ部100aと、マニピュレータ部の変位を検出する変位検出部110a1、110a2と、ベース部と外部装置200との間に取り付けられ、マニピュレータ部を試料に対して3次元移動させる移動機構120と、変位検出部によって検出された変位を打ち消すように、移動機構を制御する制御部130とを備えた微小マニピュレータである。
(もっと読む)
マニピュレータ及びマニピュレータシステム

【課題】キャピラリを所定位置にセッティングするときに操作者による誤動作を防止可能なマニピュレータを提供する。
【解決手段】このマニピュレータは、微小対象物を操作するためのキャピラリを圧電素子92により微動駆動する微動機構と、キャピラリを3軸方向に駆動する駆動手段と、圧電素子が発生する電圧を検知する電圧検知手段97と、電圧検知手段による電圧検知に基づいてキャピラリの他部分への接触状態を監視する監視手段45,98と、を備える。
(もっと読む)
マニピュレータ
【課題】高い自由度が得られ、操作者が先端動作部に加わる外力等をより確実に感知する。
【解決手段】マニピュレータは、進退動作するワイヤ56と、ワイヤ56に両端が接続された受動ワイヤ252と、基端側から順に、アイドルプーリ140、ガイドプーリ142及び進退可能な受動プーリ156と、受動プーリ156に連結されたエンドエフェクタ104とを有する。受動ワイヤ252は、ターミナル250から、アイドルプーリ140の第1の側方を通り、第1の側方と逆の第2の側方に延在して受動プーリ156の第2の側方を通り、該受動プーリ156に巻き掛けられ、該受動プーリ156の第1の側方を通り、アイドルプーリ140の第2の側方を通ってターミナル250に戻る8字の経路で配設されている。受動ワイヤ252は、アイドルプーリ140とガイドプーリ142との間で交差している。
(もっと読む)
マニピュレータシステム
【課題】高い自由度が得られ、操作者が先端動作部に加わる外力等をより確実に感知する。
【解決手段】マニピュレータは、トリガレバー32を含む操作部14と、エンドエフェクタ104、及びエンドエフェクタ104の向きを変えるヨー軸及びロール軸を含む先端動作部12と、操作部14と先端動作部12を連結する連結シャフト48とを有する。操作部14のアクチュエータブロック30にはヨー軸及びロール軸を駆動するモータ40及び41と、トリガレバー32の操作を機械的に伝達して、エンドエフェクタ104を駆動するグリッパ操作量補正部42が設けられている。コントローラ45は、ヨー軸及びロール軸の姿勢角度によるエンドエフェクタ104の干渉量を演算する。グリッパ操作量補正部42は、コントローラ45の作用下に、プッシュロッドを進退させ、干渉量を補償するようにトリガレバー32による操作量を補正する。
(もっと読む)
医療用マニピュレータ
【課題】操作性を一層向上させることが可能な医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10は、エンドエフェクタであるグリッパ22を含む先端動作部14と、前記先端動作部14を操作する操作部16と、前記先端動作部14と前記操作部16とを連結する連結部12と、前記先端動作部14の姿勢を変える姿勢変更機構とを備え、前記グリッパ22の動作は、前記操作部を操作者が操作することにより伝達部材を介して機械的に操作される一方、前記姿勢変更機構の動作は、前記操作部16を操作者が操作することにより作動する屈曲用駆動源及び回転用駆動源を介して操作される。
(もっと読む)
マニピュレータ、マニピュレータシステム、マニピュレータ用画像表示装置及びマニピュレーションシステム
【課題】細胞等の微小微小対象物に対しキャピラリによるインジェクション操作を行う際に、かかる操作のための動作を確実に精度よく繰り返して行うことが可能なマニピュレータ及びマニピュレータシステムを提供する。
【解決手段】このマニピュレータは、ナノポジショナの構造を有し、キャピラリの微動動作を行うことで微小対象物に対するインジェクションが可能であって、キャピラリの動作を制御する制御部43と、制御部に対しキャピラリの動作を指示するために操作者により操作される操作部47,49と、を備え、操作部が、その指示の少なくとも一部を押されることで実行するボタン操作部47a,47bを有し、ボタン操作部を押すことで、キャピラリによるインジェクション操作の少なくとも一部の動作が行われる。
(もっと読む)
微小物体移動方法、微小物体移動システム、およびそれを用いた液体混合システム
【課題】ナノスケールやマイクロメートルオーダーの微小物体を非接触で運動制御する一手法として,光圧を用いることが知られている。しかし、従来では高NAの光学系を用いており、装置の小型化が進まず、例えば光マイクロチップのような微小構造体中に用いることが困難であった。
【解決手段】端面を半球状に研磨した光ファイバから放射させた、集光度が低い3本のビーム(レーザ光線)で正三角形状の循環経路を構成する。ビームの集光が緩やかである場合、照射対象に対してビームの放射方向とビーム断面内の中心方向に光圧が作用する。この性質を利用することでレーザビーム網に沿って、マイクロメートルオーダーの微小物体を循環運動させることができる。
(もっと読む)
マニピュレータシステム及び制御装置
【課題】作業部における動作をする部分が規定の原点位置からずれた状態で作業部が取り外されることを認識して操作者に注意喚起をする。
【解決手段】マニピュレータ10は、操作部14と、交換自在な作業部15とを有する。作業部15は、制御装置514aの作用下に動作する先端動作部12と、固体識別用のIDを保持するID保持部104とを備える。制御装置514aは、ID保持部104のIDを認識するとともに、作業部15が操作部14に接続されているか否かを判断するID認識部120と、先端動作部12が規定の原点位置又は非原点位置であることを認識する原点認識部122と、先端動作部12が非原点位置であると判断される場合で、先端動作部12が操作部14から外されたと判断されるときに取外警告を発する警告部124とを有する。
(もっと読む)
マニピュレータ
【課題】熟練者に頼ることなく、試料台に貼り付いた試料を容易に採取することができるマニピュレータを提供する。
【解決手段】ピペット24、34の微調整のナノポジショナの駆動源に用いる圧電素子に、振動モード指示時に高周波の波形の電圧を印加するようにしたため、その振動によって、試料のベース22への貼り付きを解除することができ、試料の採取を簡便とすることができる。
(もっと読む)
試料を搬送するための搬送機構
【課題】 本発明は第1ホルダ(40)内の第1位置から第2ホルダ(10)内の第2位置へ、及び/又はその逆へ試料(2)を搬送する搬送機構に関する。
【解決手段】 各ホルダ(10,40)は脱着可能な状態で試料を保持するように備えられ、ホルダ間での試料の搬送は、第2位置とは異なる搬送位置で行われる。試料がホルダ(10,40)間を搬送されるとき、機械的案内機構は、第2位置での相互精度よりも高い相互精度でホルダを位置設定し、かつ試料が第2位置にあるときには、ホルダ(10,40)のうちの少なくとも1は位置設定されない。
機械的案内機構は追加部分(50)を有して良い。
ホルダ(40)のうちの少なくとも1は多数の試料を保持するように備えられて良い。
(もっと読む)
光学的勾配力を適用するための装置
【課題】単一光ビームから複数の光学トラップを形成する。
【解決手段】誘電体小粒子を操作するための装置及び方法。本装置及び方法は、レーザービームを受取り、複数のレーザービームを形成する光学回折素子(40)の使用を含む。これらの光ビームは、次いで、テレスコープレンズ系により操作され、次いで、対物レンズ素子(20)により操作されて、誘電体小粒子を操作するための光学トラップ(50)のアレイを形成する。
(もっと読む)
微小物体ハンドリングシステム
【課題】マイクロマニピュレータへのX軸及びY軸方向の駆動指令を誤っても、中断することなく操作を続行可能な微小物体ハンドリングシステムを提供する。
【解決手段】モニタの画面中心Oをエンドエフェクタの先端部の初期位置に設定し、顕微鏡の倍率と、画面中心Oから水平及び垂直画面端までの距離に相当するX方向及びY方向の初期位置からの実距離との関係を表す相関テーブルとから実距離(Xmax,Ymax)を演算し、初期位置から実距離(Xmax,Ymax)間を駆動するための駆動許容パルス数(PXmax,PYmax)を演算しておき、駆動許容パルス数(PXmax,PYmax)を越えるX及びY方向ステッピングモータへのパルスの出力を制限する。エンドエフェクタの先端部が画面の画像表示範囲を越えて駆動しない。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】フィンガー部101の先端が閉じた状態(a)において、回転部材230を一方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423によって、フィンガー部101の屈曲部335が内側に向かって押される。圧縮ばね501の付勢力に逆らって、回転部材230をそのまま回転をさせていくと、フィンガー部101の後端は閉じていき、フィンガー部101の先端は開いていく。一方、フィンガー部101の先端が開いている状態(b)において、回転部材230を他方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423に追従して、フィンガー部101の屈曲部335が外側に向かって移動する。回転部材230をそのまま回転させていくと、フィンガー部101の後端は開いていき、フィンガー部101の先端は閉じていく。
(もっと読む)
マイクロマニピュレータシステム、プログラム、及び結果確認支援方法
【課題】 標本に対する操作の成否を作業者が迅速に確認できるようにするマイクロマニピュレータシステム、更には自動的に行った操作が失敗した標本に対し、その操作を再度、自動的に行うことができるマイクロマニピュレータシステムを提供する。
【解決手段】 CPU102は、標本容器Sに入っている標本に針30aを刺して溶液を注入する操作を自動的に行う場合、その操作を行った標本毎に、カメラ制御ユニット9から送られる、針30aを標本に刺した後の画像の記憶装置101への保存、及びその画像を画像表示用メモリ112に格納することによるモニタ113への表示を行う。作業者には、入力装置103を操作させて、標本への溶液の注入が成功したか否かを示すデータを表示させた画像から判定させて入力させる。
(もっと読む)
マイクロマニピュレータシステム、プログラム、及び標本操作方法
【課題】 標本の適切な位置に操作針を刺しての操作を自動的に行うことができるマイクロマニピュレータシステム、更には標本のなかから操作すべき標本のみを抽出して、操作針を用いた操作を自動的に行うことができるマイクロマニピュレータシステムを提供する。
【解決手段】 CPU102は、標本容器Sに入っている標本に操作針30aを刺すべき挿入位置、及びその操作針30aを刺すべき挿入方向を、作業者が設定する条件を考慮して決定する。操作針30aを刺しての操作を行うべき標本も、作業者が設定する条件を考慮して選択する。それにより、作業者が所望する標本のみに、作業者が所望する形で操作針30aを刺しての操作を自動的に行う。
(もっと読む)
複数ロボットの制御装置
【課題】ロボット上の操作対象を機械的に操作する操作手段を備え、駆動電圧及び駆動電流で駆動される複数のロボットを容易に制御することのできる構成の簡単な複数ロボットの制御装置を提案する。
【解決手段】本発明は、ロボット上の操作対象を機械的に操作する操作手段を備え、駆動電圧及び駆動電流で駆動される複数のロボットを制御する複数ロボットの制御装置であって、基本波形電圧及び基本波形電流を発生する基本波形発生手段と、複数のロボットを選択する選択手段と、その選択手段によって選択されたロボットに応じて、基本波形発生手段よりの基本波形電圧及び基本波形電流を可変して得た駆動電圧及び駆動電流を該ロボットに供給する可変手段とを有する。
(もっと読む)
マニュピレータシステム及び顕微鏡システム
【課題】 操作針の針先を標本の観察位置に針先や標本を損傷することなく容易にセットすることが可能なマニュピレータシステム及び顕微鏡システムを提供すること。
【解決手段】 顕微鏡のステージ3に載置された標本5に微細な操作を行うための操作針7を有する電気制御可能な少なくとも1つのマニピュレータ9と、前記マニピュレータの駆動を制御するマニピュレータ制御手段13と、観察前に前記標本の観察位置に対して前記操作針の針先を前記観察位置から離れた位置に停止させるオフセットを設定するオフセット設定手段29を備える制御手段11を有し、観察時、前記制御手段が、前記マニピュレータ制御手段を介して前記マニピュレータを駆動し、前記操作針の針先を前記オフセットされた量だけ標本側に移動し位置決めすることを特徴とするマニュピレータシステムを提供する。
(もっと読む)
1 - 17 / 17
[ Back to top ]