
Fターム[3C030BC15]の内容
Fターム[3C030BC15]の下位に属するFターム
多関節型ロボットによるもの (211)
Fターム[3C030BC15]に分類される特許
21 - 40 / 56
サスペンションアッセンブリ取り付け方法
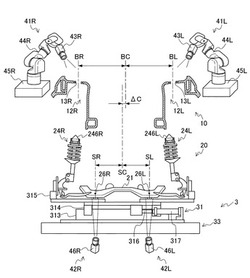
【課題】左右のキャンバ角の差分を極力低減しつつ、サスペンションアッセンブリをボディに取り付けることができるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】アッセンブリ取り付け方法は、ダンパ取付孔13L,13Rの位置BL,BRを測定し、ボディ10の中心位置BCを算出する手順と、サブフレーム基準穴26L,26Rの位置SL,SRを測定し、サスペンションアッセンブリ20の中心位置SCを算出する手順と、中心位置BCと中心位置SCとが一致するように、ボディ10にサスペンションアッセンブリ20を取り付ける手順とを備える。ボディ10にサスペンションアッセンブリ20を取り付ける手順では、サスペンションアッセンブリ20のサブフレーム21をボディ10に固定するとともに、ダンパアッセンブリ24L,24Rの上端側をダンパハウジング12L,12Rに固定する。
(もっと読む)
パワーアシスト装置およびその制御方法

【課題】ワークを傾斜させながら搬送する場合に、パワーアシスト装置による位置決め精度を確保しつつ、搬送効率の改善を図るべく、ワークを傾斜させながら搬送しても、作業者の操作力が小さく、また作業者が所望する操作方向と実際にワークの変位方向が一致する、操作性の良いパワーアシスト装置およびその制御方法を提供する。
【解決手段】ワーク保持装置3と、ハンドル3cと、ハンドル3cに作用する作業者の操作力を計測する力センサ3dと、ワーク保持装置3を支持するロボットアーム2と、力センサ3dの計測結果に基づいてロボットアーム2の動作を制御する制御装置5と、を備えるパワーアシスト装置1の制御方法であって、ワーク保持装置3には、ワーク保持装置3の傾斜角度を計測する角度センサ6が備えられ、角度センサ6の計測結果と、力センサ3dの計測結果に基づいて、制御装置5によって、ロボットアーム2の動作を制御する。
(もっと読む)
セル生産システムにおける生産指示方法
【課題】ロボットと作業者の混合によるセル生産システムにおける生産指示方法において、生産増減に応じて生産セル内のロボットの稼動率を低下させることなく、生産セルに設定付与する作業者の数をより少なくできるようにする。
【解決手段】この生産指示方法は、ロボットと作業者とが作業場所である1つの生産セル内で、部品を物品に組付ける組付作業を工程順に分担して組付完成品を生産するセル生産システムに対する生産指示方法であり、ロボットは、作業者と同等に組付作業を実行できる汎用の組付けロボットであり、ロボット数Nrと、1物品当たりの最小の総組付時間Tと、生産セルに要求される単位時間当たりの生産数である時産数Pdと、が与えられたとき、作業者の数が最少となる条件のもとで当該生産セルの時産数Pcが要求時産数Pdを満たすようにロボットの分担作業時間Trおよび当該生産セルに設定付与される作業者の数Nwを決定する。
(もっと読む)
並列工程システムにおいて複合製品を組み立てるための方法および装置
【課題】複合製品を組み立てるために構成要素の群が提供される、並列工程システムにおいて複合製品を組み立てるための方法および装置を提供する。
【解決手段】移送システム18を使用して、構成要素の群を、複数の同様のコンピュータ化された組立セル20のうちの1つへと移送する。構成要素の群は、コンピュータ化された組立セルを使用して、複合製品内に自動的に組み込まれる。複合製品は次いで、組立セルのうちの1つから、コンピュータ化された試験セル22へと移送され、そこで複合製品は、複合製品の正しい寸法および機能を保証するために試験される。複合製品は次いで、複合製品が欠陥を有する場合、移送システムによって、試験セルから部品棄却領域またはコンベヤ24へと移送され、あるいは、複合製品が欠陥を有さない場合、自動ダンネージ装填システムまたは部品復帰システム26へと移送される。
(もっと読む)
組立て用ロボットハンド
【課題】 コンプライアンス作用の中心位置およびコンプライアンスの大きさを任意に変更可能で、かつ受動的な動作で、複雑な計算を必要としない組立て用ロボットハンドを提供することである。
【解決手段】 一つの中心線12に対して線対称に配置され、かつ、この中心線と直角をなす複数個の遥動軸の周りに前記中心線と重なる複数個の平面上に遥動可能な複数個のチャック爪13と、複数個の遥動軸の中心位置を前記一つの中心線と略直角をなす方向に移動させる手段と、複数個のチャック爪の先端部に力を負荷する複数個の手段とから構成され、複数個の遥動軸の位置および先端部に負荷される力の大きさを変化させることにより、軸状部材のコンプライアンス作用の中心位置およびコンプライアンスの大きさを調整できるようにしたことを特徴とする組立て用ロボットハンド。
(もっと読む)
ワーク搬送装置およびワーク設置方法
【課題】ワークの周縁部を均一な力で被設置物に押圧することが可能なワーク搬送装置およびワーク設置方法を提供する。
【解決手段】把持具20によりリアガラス5を把持し、把持したリアガラス5を支持アーム10の動作により車体7の窓枠7aまで搬送するとともに、窓枠7aに対して押圧しつつ設置するワーク搬送装置1であって、前記把持具20の各吸着パッド30は、該吸着パッド30にかかる力を検出可能な力検出センサ31を備え、ワーク搬送装置1の制御装置80は、前記窓枠7aにリアガラス5を設置する際に、前記各吸着パッド30の力検出センサ検出値31の大きさに基づいて、前記支持アーム10の動作を制御する。
(もっと読む)
ワーク搬送装置
【課題】昇降用の駆動手段および回動動作用の駆動手段といったように、大きく重量大な駆動手段を2種類も備えなくて済み、小型で軽量に構成することができるワーク搬送装置を提供する。
【解決手段】ワークとなるウィンドウ5を把持する把持具20と、把持具20を移動可能に支持する支持アーム10とを備え、把持具20にて把持したウィンドウ5を支持アーム10によりウィンドウ5が組み付けられるウィンドウ枠7a・枠7bまで搬送するとともに、ウィンドウ5の姿勢をウィンドウ枠7a・7bに応じた姿勢に変更するワーク搬送装置1であって、支持アーム10を、複数のリンク11・12・13・14が閉ループ状に接続される閉ループリンク機構に構成し、支持アーム10の把持具20に接続される一対のリンク13・14のうち、何れか一方のリンク13・14に対する把持具20の姿勢を固定可能に構成する。
(もっと読む)
アッセンブリの組立て方法
【課題】複数の部品が積層されて構成されるアッセンブリについて、低コストかつ省スペースで組み立てできるアッセンブリの組立て方法を提供する。
【解決手段】アッセンブリの組立方法は、最上段に位置する右フォーク11Aから最下段に位置する後述の左フォーク11Bまでが積層されて構成されるフロントフォークアッセンブリの組立方法である。このアッセンブリの組立方法は、搬送装置を駆動して把持装置30により、第右フォーク11Aを把持する第1の手順と、把持装置30により、右フォーク11Aから第(m−1)番目(mは2以上の整数)までの部品を把持した状態で、第m番目の部品を把持する第mの手順と、を備え、前記第mの手順を、mが2から5になるまで繰り返すことにより、フロントフォークアッセンブリの組み付け状態を順番に実現する。
(もっと読む)
バルブのバルブガイドへの挿入方法及び同挿入装置
【課題】各部の摩耗、変形、破損の心配がなく、また、簡単な構成で、バルブをバルブガイドに容易に且つ確実に挿入できるようにする。
【解決手段】少なくとも下部支持部材26に加振装置19で振動を与えた状態で、バルブ13を支持した上部支持部材25及び下部支持部材26を一体的にバルブガイド12側へ下降させたときに、軸部13aの面取り部がバルブガイド12の開口縁に掛からない場合には、軸部13aの端面13eがバルブガイド12の上端面12bに当った後に、上部支持部材25を傘部13bから次第に離すとともに下部支持部材26による軸部13aの支持位置を下方に移動させて軸部13aの端面13e側の振れを小さくすることで軸部13aの下端の面取り部がバルブガイド12に設けられたバルブ挿入穴12aの開口縁に自動で掛かるため、この後に、バルブ13を押圧子で押してバルブ挿入穴12aに挿入する。
(もっと読む)
メタル取付装置
【課題】コンロッドの倒れている方向がバラバラであっても、全自動で軸受メタルを取付可能にする。
【解決手段】クランクケース19に対して、コンロッド1の大端部3はピストンピンの軸線回りに、その両側のいずれか側へバラバラに倒れている。メタル取付装置20をコンロッド1の上方へ移動し、姿勢センサ24にて大端部3がいずれか側にあるかを検知し、その側へメタル取付装置20を移動させ、さらに下降させてクランプアーム25で大端部3を支持し、続いてメタル取付装置20をコンロッド1の直上へ位置させてコンロッド1を直立させる。この状態でメタルキャッチ部に挟持された軸受メタルを押し下げてメタル取付凹部8へ取付ける。
(もっと読む)
組付装置および組付方法
【課題】コックピットモジュールを上下方向へと移動させることなくコックピットモジュールの仮保持作業を行うことができ、さらに組付作業の負担低減と作業性の向上を図ることをが出来る組付装置及び組付方法を提供する。
【解決手段】組付装置1は、コックピットモジュールの側部に取り付けられる固定ブラケット20と、車体本体に設けられる保持用突起を案内するためのガイド空間35を固定ブラケット20と共に形成する可動ブラケット30とを有している。可動ブラケット30の車両後方側端部31は、固定ブラケット20に対して回動可能に取り付けられ、可動ブラケット30のガイド空間側縁部には、固定ブラケット20のガイド空間35側縁部に当接する凸部36が形成され、凸部36における車両前方側の壁面に傾斜部37が形成されている。
(もっと読む)
ウィンドウガラス取付装置及びウィンドウガラス取付方法
【課題】作業者が一人で、ウィンドウガラスの車体に対する位置合わせを行い、車体へのウィンドウガラス取付作業を行うことを可能にする。
【解決手段】本発明のウィンドウガラス取付装置は、ウィンドウガラス保持具に保持されたウィンドウガラスを作業者が車体の所定の取付位置に位置決めして取付ける際に、作業者の車体に対するウィンドウガラスの取付作業を容易にする。このウィンドウガラス取付装置では、ウィンドウガラス保持具に取付けられた2つのカメラが、ウィンドウガラス保持具で保持されたウィンドウガラスの左右端をそれぞれ撮像する。撮像された画像の一方のみが左右鏡像反転されてモニタ150に表示される。
(もっと読む)
ワーク搭載装置
【課題】重量ワークを搭載対象に搭載するときに大きな労力を必要とせず、微妙な位置合わせ調整を行うことのできるシンプルな構造のワーク搭載装置を提供する。
【解決手段】ワーク搭載装置20は、本体フレーム22と、本体フレーム22に対して、回転軸34により回転動作可能に支持された可動アーム24と、可動アーム24の一方側先端部に固定されて、アクスルアッシー10を把持可能な把持部28と、可動アーム24の回転動作を抑制する回転抑制部材30とを含んで構成されている。回転抑制部材30は、回転軸34を挟んで可動アーム24の一方側先端部とは反対側の他方側の一部と、本体フレーム22の一部を接続する。回転抑制部材30は、把持部28によりアクスルアッシー10が把持された場合に、可動アーム24の回転動作を抑制し把持部28の姿勢を中立姿勢に保つ。
(もっと読む)
施工装置、施工装置用ボードスタッカおよびボードの施工方法、並びにボード保持装置
【課題】操作が簡単であり、隣接するボード相互の位置ズレを防止または抑制可能であり、さらに、その施工の作業効率を向上させ得る施工装置を提供する。
【解決手段】この施工装置1は、自走台車2、可動アーム4、およびアタッチメント装着部5を備え、アタッチメント装着部5は、可動アーム4の先端側に設けられており、ボード100を保持可能なボード保持部70およびタッカー装置等の施工用の付属装置が装着される。そして、可動アーム4は、自走台車2上にその進行方向に沿って設けられた案内部12およびこの案内部12上を相対移動可能なスライダ14を有する直動案内装置10を備えており、この直動案内装置10は、そのスライダ14の相対移動によるアタッチメント装着部5の移動量が、ボード100の幅の2倍以上になっている。
(もっと読む)
構造物組立て制御方法および構造物組立て制御装置
【課題】建造物・移動体(自動車・船舶・航空機)といった構造物の自動組立て、宇宙空間でのドッキングやステーションなどの宇宙構造物建設にて、時間短縮や組合せ部材同士の衝突・干渉をさける適切かつ有効な組立て制御技術を提供する。
【解決手段】構造部品姿勢データのベクトルが同一直線にない第1姿勢ベクトル1、10、第2姿勢ベクトル2、20で、結合する2つの構造部品姿勢データのベクトル的な差を減ずる方向に一方の構造部品を移動A、Bし結合させて組み立てる。その制御ステップにて、第1ベクトル11を軸とした回転Bによる移動制御を行う構造物組立て制御技術。
(もっと読む)
ねじ締付け装置
【課題】部品保持部の取り付け取り外しが容易で、ねじ単品であっても高速締め付けが可能なねじ締付け装置を提供することを目的とする。
【解決手段】このねじ締付け装置31は、部品保持機構38は、ねじ保持部33に設けられた部品保持機構本体39と、この部品保持機構本体39に回動可能に設けられたクランプ体47と、このクランプ体47をねじ保持部33に押圧する第1のスプリング57と、部品保持機構本体39に軸方向移動可能に装着された部品チャック65と、このチャック65を被締結部品に向かって押圧する第2のスプリング69とを有している。
(もっと読む)
組み立て装置及び組立て方法
【課題】部品の組立て精度をより向上させることが可能な組立て装置及び組立て方法を提供する。
【解決手段】組立て装置は、ワークWを重力方向下方から押し上げ、ワークWの重力方向における位置決めを行う位置決め装置76と、位置決め装置76により位置決めされたワークWに重力方向上方から部品Pを載置するコレット36と、ワークWの位置を測定する測定装置と、測定装置による測定結果に基づいて位置決め装置76の制御を行う制御装置とを有している。制御装置は、ワークWの重力方向における位置が予め定められた位置となるように、位置決め装置76を制御する。
(もっと読む)
ピン打ち装置及びピン打ち方法
【課題】下端に係止爪を備えたピン部の上端に脆弱部を介して柄部を設けてなる連結ピンにおいて、ピン打ち作業の作業時間を安定させて、生産性を高めることができる技術を提供する。
【解決手段】ピン打ち装置は、柄部を把持する把持部51と、円弧ガイド部160を有し、この円弧ガイド部160を介して把持部51を支える把持部支持部材92と、円弧ガイド部160に沿って把持部51を脆弱部42を中心に回動させる回動機構58とを備えた。円弧ガイド部160には、外側円弧ガイド部169と、内側円弧ガイド部168とを含み、この内側円弧ガイド部168の回動終端163と脆弱部42とを結ぶ線よりも、外側円弧ガイド部169の回動終端164がはみ出すように、外側円弧ガイド部169は長く設定されている。
(もっと読む)
シール部材挿入方法及び装置
【課題】めくれが発生してもそのめくれを戻し、その後、リップ部分を順方向(めくれない方向)に移動し所定の位置にシール部材を位置させることで、確実にめくれのないシール挿入が行えるシール挿入方法及び装置を提供する。
【解決手段】リップ部分2aを有するシール部材2を軸1上に挿入するシール部材挿入方法において、前記シール部材2を前記軸1に挿入するために、それらを相対的に動かし、前記シール部材2を前記軸1上の所定の位置を超えて挿入し、その後、逆方向に所定位置まで戻す。
(もっと読む)
ステムシール及びスプリングシート供給・組付装置
【課題】シリンダヘッドにバルブステムシール及びバルブスプリングシートを同時に供給し組み付ける装置において、装置全体及び部品組付ヘッドを小型化すると共に各部品の組み付け精度を良好に保つ。
【解決手段】供給位置にある各バルブステムシールSI,SEを移載位置へ移動させると共にこれらの何れかを保持してバルブスプリングシートSと同軸配置し、このバルブスプリングシートSを軸方向で貫通するシート側移動ロッドで前記バルブステムシールSI又はSEを支持し、各部品の軸方向で昇降する部品組付ヘッドで前記バルブステムシールSI又はSE及びバルブスプリングシートSを併せて保持し、これらをシリンダヘッドHのバルブガイドと同軸配置して組み付ける。
(もっと読む)
21 - 40 / 56
[ Back to top ]