
Fターム[3C269AB23]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | ハンドリング作業 (150) | パレタイズ、デパレタイズ (7)
Fターム[3C269AB23]に分類される特許
1 - 7 / 7
ロボット制御システム、ロボットシステム
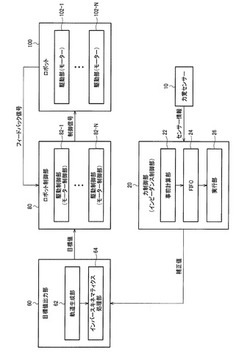
【課題】制御ハードウェアーへの性能要求を低減できると共に応答性の改善も図れるロボット制御システム、ロボットシステム等の提供。
【解決手段】ロボット制御システムは、ロボット100のフィードバック制御の目標値を出力する目標値出力部60と、力覚センサー10からのセンサー情報に基づいて力制御を行い、目標値の補正値を出力する力制御部20と、補正値により補正された目標値に基づいて、ロボットのフィードバック制御を行うロボット制御部80を含む。力制御部20は、ロボットの姿勢に応じて変化する制御パラメーターを事前計算する事前計算部22と、センサー情報と制御パラメーターとに基づき補正値を求める演算処理を実行する実行部26を含む。
(もっと読む)
搬送動作ティーチング方法

【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
ロボット及びその制御方法
【課題】ロボットの解体・点検作業を必要とするようなトラブルが発生する前に、ロボットの異常状態を検出すること。
【解決手段】本発明のロボットにおいては、ロボット制御手段40が、アーム駆動手段及び手首軸駆動手段を駆動してエンドエフェクタ25を所定の実位置に移動させ、エンドエフェクタ25が所定の実位置に到達した時点でのロボットアーム28の姿勢及び手首軸の角度位置を検出し、その検出結果に基づいて所定の実位置に対応する計測位置を算出して記憶し、異なる時点において取得された複数の計測位置の時系列データに基づいてロボットの状態を判定する。
(もっと読む)
シミュレーション装置
【課題】実在機器と仮想機器とを混在させた状態でそれらの動作をシミュレーションする場合に、実在機器及び仮想機器の動作を制御するための接続関係の記述が容易であると共に、実在機器と仮想機器との動作を切換えた場合であっても確実に同期を図ることができるシミュレーション装置を提供する。
【解決手段】シミュレータ1のシミュレーション管理部2は、動作ツリーを構成するタスクの接続関係に基づいて、自己に予め記憶している実行用プログラムにより実機5を直接制御すると共に仮想表示空間で仮想機6を制御するように構成されている。これにより、実機5と仮想機6との動作の同期を確実に図ることができると共に、実機5と仮想機6との動作を切換えた場合であっても同期化を維持することができる。
(もっと読む)
創薬用自動ティーチング装置及び方法
【課題】短時間で行え、計測精度が高精度であり、安全性が高い創薬用ピッキング機構の創薬用自動ティーチング装置及び方法を提供する。
【解決手段】創薬用ピッキング機構が、測定用治具400を把持するとともに、位置を認識させる収納セル112の4つの隔壁に囲まれた領域内に測定用治具400を挿入して4つの隔壁方向に移動させて、測定用治具400が隔壁110の上部に当接する位置を計測し、X軸方向の移動から得られた2つのX座標値とY軸方向の移動から得られた2つのY座標値を求め、前記2つのX座標値の平均と前記2つのY座標値の平均とを収納セル112の中心位置とする位置計測機能を有することによって、前記の課題を解決する。
(もっと読む)
ロボットによるパレタイジング作業のためのロボットプログラミング装置
【課題】パレタイジング作業のプログラムの作成に必要な実機ロボットの操作を削減し、パレタイジングプログラムの作成に要する時間を短縮することを可能にしたロボットプログラミング装置を提供する。
【解決手段】ロボットプログラミング装置は、複数種類の荷物、コンベア、判別装置、ロボット及び複数のパレットの3次元モデルを記憶する記憶部と、記憶部に記憶された3次元モデルのレイアウトを仮想空間内で作成するレイアウト作成部と、レイアウトを画面表示する表示部と、表示部に表示された各機器に関する情報を設定する情報設定部と、3次元モデルのレイアウト、及び情報設定部に設定された情報に基づいてロボットのパレタイジングプログラムを生成するプログラム生成部と、を有する。
(もっと読む)
機械、特に生産機械における位置案内されて移動可能な付加要素の付加位置目標値のコンピュータ支援による決定方法
コンピュータ(11)が空間内の1つの予め定められた基本軌道に従ってその都度1つの基本位置目標値(G*)を求める。従って、機械の基本要素(4)に設定されると、基本要素(4)は基本軌道に沿って位置案内されて移動される。更に、コンピュータ(11)がその都度の基本位置目標値(G*)に基づいて空間内の対応する現在の付加終端位置(Z4)が求める。コンピュータ(11)が空間内の予め定められた固定の付加始端位置(Z1)および現在の付加終端位置(Z4)に基づいてその都度1つの付加位置目標値(Z*)も求める。従って、機械の付加要素(2)に設定されると、付加要素(2)が付加始端位置(Z1)から出発して現在の付加軌道に沿って位置案内されて現在の付加終端位置(Z4)へ移動される。  (もっと読む)
(もっと読む)
1 - 7 / 7
[ Back to top ]