
Fターム[3C269EF41]の内容
数値制御 (19,287) | プログラムの作成、管理 (3,117) | プログラムのチェック (37)
Fターム[3C269EF41]の下位に属するFターム
エラーを発見するための方法 (12)
エラー発見後の処理内容 (11)
Fターム[3C269EF41]に分類される特許
1 - 14 / 14
工作機械用制御装置
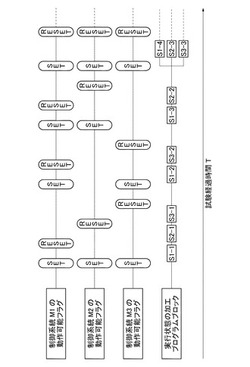
【課題】工作機械を試験する前に作業者に加工プログラムの実行順を入力させる作業負担を回避して簡便に加工プログラムのデバッグを実現する工作機械用制御装置を提供すること。
【解決手段】系統番号1、2、3の小さい順に加工プログラムブロックS1−1等を直列に実行するとともに同時に並行して実行すべき加工プログラムブロックS1−4、2−3、3−3を自動的に並行して同時に実行してデバッグを実行する工作機械用制御装置100。
(もっと読む)
アーク溶接ロボット制御装置

【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
学習制御ロボット
【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
ロボット装置用の制御プログラムを試験するための試験装置
本発明は、実際のロボット装置用の、具体的には、複数のロボット制御部(2.1〜2.n)を有する塗装装置用の制御プログラムを試験する試験装置に関連する。それらはそれぞれ制御プログラムを含み、実際のロボット装置におけるロボット制御部(2.1〜2.n)と、制御ユニット(4)が制御プログラムを含み、実際のロボット装置における制御ユニット(4)に相当するロボット制御部(2.1〜2.n)を調節するための少なくとも1つの制御ユニット(4)とに相当し、ロボット制御部(2.1〜2.n)をお互いに接続する、および/または、制御ユニット(4)に接続する第一のデータバス(3)も有し、第一のデータバス(3)は実際のロボット装置におけるデータバスに相当する。試験装置が、第一のデータバス(3)に接続され、かつ、実際のロボット装置の周辺機器部品をシミュレーションするモデリングデバイス(9)をも有し、そのため制御プログラムは周辺機器部品なしで試験され得る。本発明はまた、好適な試験方法をも含む。 (もっと読む)
数値制御プログラムのコマンド表示装置及びコマンド表示プログラム
【課題】工作機械のための数値制御プログラムに記述されたペアコマンドの相対関係を容易に確認することを課題とする。
【解決手段】対で使用されるペアコマンドA2を一組以上含む複数のコマンドA1の中から選ばれるコマンドA1で記述され記憶部(数値制御プログラム保存領域31)に記憶されている数値制御プログラムP1に記述されたペアコマンドA2を抽出し、前記ペアコマンドA2の組PA1毎に前記抽出されたペアコマンドA2を分けて前記数値制御プログラムP1に記載された順に並べて表示する。
(もっと読む)
ロボットコントロール・システム、ロボットコントロール方法
【課題】ロボットコントロール・システムを停止することなく、動作制御装置に追加した機能部の制御プログラムの更新を行うことを可能にしたロボットコントロール・システムおよびロボットコントロール方法を提供することを課題としている。
【解決手段】ロボットコントロール・システム1は、動作制御装置2と動作指示装置3とを備え、ロボット4が接続されている。動作制御装置2は通信部201と通信変換部202と第1記憶部203と第2記憶部204と、プログラム実行部205と第3記憶部206とロボット制御部207と書き換え検証部208を備え、動作指示装置3は通信部301と演算部302とROM303とデータ読出部304と第4記憶部305を備えている。
(もっと読む)
工作機械に対してワークの供給及び取り出しを行うロボットを制御するロボット制御装置
【課題】ロボットと工作機械を組み合わせて使用する加工システムにおいて、工作機械に関連する作業のためにロボットの動作を停止させる必要性を低減させ、作業効率を向上させる。
【解決手段】ロボット制御装置18は、ロボット制御装置18の操作を行うための持ち運び可能な教示操作盤46を備え、ネットワークケーブル42によって工作機械制御装置20,22と接続されている。教示操作盤46は、様々な情報を表示するための表示器を有し、工作機械制御装置20,22からネットワークケーブル42を介して取得した工作機械14,16に関する情報を教示操作盤46の表示器の工作機械用画面上に表示するように構成されている。
(もっと読む)
ロボット制御システム
【課題】記憶容量の増大を招くことなく不適切な挙動に対応するログが取得され、短時間でロボット制御プログラムの正確な確認が容易なロボット制御システムを提供する。
【解決手段】実行ログ取得部24は、ロボット制御プログラム40の実行によりロボット制御プログラム40で使用される実行行および変数を取得する。実行行および実行変数ログは、ログ取得スタート行からログ取得エンド行までロボット制御プログラム40が周回するごとに一周期ログとして取得される。比較部26は、取得する一周期ログと、長期記憶部32に蓄積された最新長期記憶一周期ログとを比較する。長期記憶判断部27は、これらが異なるとき、取得した一周期ログの長期記憶が必要であると判断して長期記憶部32に記憶する。これにより、記憶容量の増大を招くことなく短時間でロボット制御プログラム40の動作を正確かつ容易に確認される。
(もっと読む)
数値制御装置及び数値制御装置用制御プログラム
【課題】 工作機械の数値制御装置及び数値制御装置用制御プログラムに関し、工作機械の主軸に装着された工具がセンター孔付き工具ではないと判断した場合に、冷却液供給手段による冷却液の供給を停止させるように制御できること。
【解決手段】 読み込まれた加工プログラムの制御コマンドに基づいて、現在主軸に装着されている工具がセンター孔付き工具か否かを判断し、主軸に装着されている工具はセンター孔付き工具ではないと判断した場合に(S3;No)、冷却液供給手段による冷却液の供給を停止させ、アラームメッセージをディスプレイに表示させた後(S11)、プログラム修正モードへ移行しこの処理を一時的に停止する(S12)。
(もっと読む)
ロボット制御装置
【課題】入力されたキューに基づいてエラー処理を実行するエラー処理手段を備えるものにあって、キューが溢れることに起因した不具合を未然に防止する。
【解決手段】ロボットシステム中のエラーを検出するエラー検出部14、エラー処理の実行を要求するキューを出力する信号処理部15、キューに基づいてエラー処理を実行するエラー処理部16、キューのエラー内容を記憶する記憶部17を設けると共に、信号処理部15に、判断部18及びキュー制限部19を設ける。判断部18は、エラー発生時のエラー内容と、記憶部17に記憶されている前回のエラー内容とが同一であるかどうかを判断し、キュー制限部19は、判断部18が同一のエラーでないと判断した場合にキューの出力を許容すると共に、同一のエラーと判断したときに、キューの出力を制限する。
(もっと読む)
数値制御装置及び数値制御システム
【課題】 二重化の信頼性を高めることができる数値制御装置及び数値制御システムを得る。
【解決手段】 CPUを内蔵するPLC101とバスで結合されるとともに、PLC101に入力される信号と同一の信号が入力され、且つPLCで実行されるPLC用プログラム109と実質的に同一の数値制御装置用プログラム110が、PLC用プログラム109の実行と並行して実行される数値制御装置において、PLC用プログラム109、数値制御装置用プログラム110及び各プログラムの動作を規定するパラメータを記憶する記憶手段106と、この記憶手段106に記憶されたPLC用プログラム109及びパラメータをPLC101に転送するとともに、この転送されたPLC用プログラム109及びパラメータを呼出し、且つこの呼出されたPLC用プログラムと数値制御装置に予め存在するPLC用プログラム109とを照合するとともに、呼出された制御装置側パラメータと数値制御装置側パラメータとを照合する手段とを備える。
(もっと読む)
数値制御装置、加工プログラム一覧表示制御プログラム及び加工プログラム一覧表示制御プログラム記録媒体
【課題】 加工プログラムのプログラムリストを表示させた際に、使用する工具の割当てが完了しているか否かが加工プログラム毎に同時に分かり、加工作業の取り掛かりを迅速化できるようにすることである。
【解決手段】 加工プログラムメモリに記憶されている複数の加工プログラムの各々について、工具情報エリアに工具情報が記憶されているか否かが検索され(S23)、工具情報が記憶されていた加工プログラムの各「加工プログラムエリア」に、工具割当て完了情報が夫々追加して記憶される(S25)。加工プログラムのリスト表示に際して、リスト表示のための表示情報が夫々読み込まれ(S26)、工具割当て完了情報が記憶された加工プログラムのプログラム番号に記号「○」が表示される(S27)。
(もっと読む)
ロボットシステムのシミュレーション装置
【課題】オフラインで、撮像カメラの適正な設置位置を決定すると共に、検出パラメータを調整することを可能とさせるロボットシステムのシミュレーション装置を提供する。
【解決手段】シミュレーション装置30は、ロボットシステムの三次元モデルを表示装置32の画面上に表示し、ロボットと撮像カメラと周辺機器とを備えるロボットシステムのシミュレーションを行う。シミュレーション装置30は、三次元仮想空間を画面上に表示する表示装置32と、操作者によって指定された撮像範囲と、使用される撮像カメラの光学的特徴情報と、要求される計測精度とに基づいて、撮像カメラの設置位置を決定するカメラ位置決定部40と、三次元仮想空間における撮像カメラの位置とその光学的特徴情報に基づいて、撮像カメラにより取得されるべき仮想的な画像を生成する仮想画像生成部42とを備え、撮像カメラの適正な位置の決定及び検出パラメータの調整を容易にさせる。
(もっと読む)
シミュレーション方法およびその装置
【課題】 加工経路を決定するパラメータや三次元形状モデルデータを個々に設定することなく、実機から取込むことにより、工具経路を忠実に再現できるシミュレーション環境を構築することが可能なシミュレーション装置を得る。
【解決手段】 機械に保有するパラメータ、三次元形状モデルデータ等の、経路チェックやシミュレーションに必要なデータを出力する事ができる数値制御装置と、その数値制御装置から出力したデータを使用して、実機と同条件のシミュレーション環境を再現し、且つ、実機に搭載するシーケンス制御用H/Wと同一のH/Wを搭載することにより、周辺機器を含めて、実機と全く同じ工具経路を生成し、シミュレーションをすることが出来るように構成されていることを特徴とするシミュレーション装置。
(もっと読む)
1 - 14 / 14
[ Back to top ]