
Fターム[3C269JJ02]の内容
数値制御 (19,287) | 位置検出信号、位置検出手段の種類 (830) | 増分デジタル信号であるもの (13)
Fターム[3C269JJ02]に分類される特許
1 - 13 / 13
機械における原点位置調整方法および原点位置調整機能を有する機械
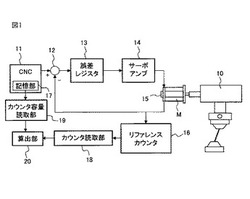
【課題】作業時間を短くしつつ、原点位置をさらに容易に設定する。
【解決手段】位置検出器を備えたサーボモータによって駆動される可動部(10)の機械原点位置調整機能を有する機械は、位置検出器により検出された値をカウントするレファレンスカウンタ(16)と、可動部を所定の方向に移動させて機械原点位置に位置決めしたときのレファレンスカウンタの容量を記憶した記憶部(17)と、可動部を位置決めしたときのレファレンスカウンタの値を読み取るレファレンスカウンタ読取部(18)と、レファレンスカウンタのカウンタ容量を読み取るカウンタ容量読取部(19)と、レファレンスカウンタの値とレファレンスカウンタ容量とに基づいて機械原点位置の調整量を算出する調整量算出部(20)と、を含む。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム

【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被駆動体の電源遮断後における再起動時に位置の特定を必要とする最終出力端の現在位置を特定可能な位置決め装置及び位置決め方法を提供する。
【解決手段】被駆動体を減速機を介して駆動するモータ10と、減速機の被駆動体側出力軸に取り付けられ出力軸の回転位置を検出するアブソリュート型エンコーダ12と、モータの回転位置をパルスを介して検出するモータ側エンコーダ11と、電源投入によりモータを原点方向に動作させ、モータ側エンコーダの基準エンコーダパルスを出力させるパルス出力手段と、基準エンコーダパルスの位置におけるアブソリュート型エンコーダの現在値を読み取る現在値読み取り手段と、読み取った現在値と予め決められたモータの回転原点位置とからモータ回転数を演算するモータ回転数演算手段と、演算結果に基づき被駆動体の位置を検出する被駆動体位置検出手段とを備えている。
(もっと読む)
位置決め装置及び工作機械装置
【課題】電源投入時に現在座標を許容誤差範囲の精度で検出し、所定位置への復帰動作をすることなく電源投入時の位置から動作を開始できる位置決め装置を提供する。
【解決手段】固定部12に対する可動部8の相対位置を検出するためのインクリメンタルエンコーダ23とアブソリュートエンコーダ21とを備え、制御装置19は、インクリメンタルエンコーダ23及びアブソリュートエンコーダ21の信号データの対応データを記憶した記憶手段と、電源投入時に読み取られた前記アブソリュートエンコーダ21の信号データから可動部8の初期座標を求める初期座標読取手段25と、電源投入時以後に読み取られたインクリメンタルエンコーダ23の信号データを基に可動部8の現在座標を求める現在座標読取手段25と、対応データによりインクリメンタルエンコーダ23の信号データに変換する信号変換手段と、を備えている。
(もっと読む)
サーフエスブローチ盤及びサーフエスブローチ加工方法
【課題】最初の試作ワークで要求精度が出ても、その後の被加工品の製品加工において、ラムの熱変位による倒れ、ねじれ、各ボールネジの伸縮をを含む変位を補正した、被加工物を要求通りに加工するために何度も加工途中での測定、補正値入力等の作業者による手入力を必要としないサーフエスブローチ盤を提供。
【解決手段】前後テーブル 7の左右前端に固定した1対の変位センサ 11a,11b、及びコラム 1左右前面に固定した変位センサ 11a,11bが当たる1対の基準面 12a,12bをそれぞれ被加工物と同じ高さの位置に取付けた。
(もっと読む)
多関節型ロボットの制御方法
【課題】静的な条件で計測し、テーブル化されたコギング補償電流テーブルによる従来のFFコギング補償方式では、重力補償電流による最適位相の変化やエンコーダ取付誤差による最適位相の誤差に対応した位相シフトが行われず、十分な振動抑制効果を発揮できないという課題を有していた。
【解決手段】重力トルク補償電流の検出及びその検出値によるコギング補償位相の補正手段を持ち、さらに、FFコギング補償無効時のモータ電流からコギング周波数成分の検出及びその検出値によるコギング補償最適位相のモータ個体差の補正手段を持つことで、重力補償電流によるコギング補償の最適位相の変化あるいはエンコーダ取付誤差による最適位相誤差が存在しても、コギングトルクに起因する振動を抑制することができる。
(もっと読む)
モータ制御システム
【課題】1台の数値制御装置でDSPのない第1形式のアンプとDSPを有する第2形式のアンプを制御するモータ制御システムで、数値制御装置に設けるインターフェース回路(シリアルバス制御回路)の個数を削減してコストを低減する。
【解決手段】PWM指令を受ける第1形式のアンプ51と、位置指令を受ける第2形式のアンプ61と、数値制御装置41と、シリアルバス48A,49Aと、を備え、数値制御装置41は、モータの位置指令を算出する第1のプロセッサ42と、位置指令から第1形式のアンプのPWM指令を算出するDSP43と、第1形式のアンプのPWM指令及び第2形式のアンプの位置指令をシリアルバス49Aに出力するシリアルバス制御回路47と、を備え、第1形式のアンプ51は、受信したPWM指令から直接モータの駆動電流信号を生成し、第2形式のアンプ61は、受信した位置指令からPWM指令を算出する第3のプロセッサ62を備える。
(もっと読む)
工作機械における位置補正方法および位置補正装置
【課題】環境温度が変化しても、スケールによる移動軸の位置検出値に対して誤差補正を的確に行うことにより、移動軸の位置制御を正確に行ってワークを高精度に加工する
【解決手段】ワークWと工具を相対移動させるX,Z,Y移動軸の位置をX,Z,Y軸スケール14,15,16で検出し、この位置検出値にもとづいてX,Z,Y移動軸を位置のフィードバック制御により作動させてワークWを加工する工作機械2における位置補正方法は、Y軸スケール16のスケール温度TsとワークWのワーク温度Twを検出し、それらの線膨張係数の差による伸縮量の差をピッチ誤差補正値としてY移動軸の位置検出値を補正する場合に、実際に加工したワークWに残った加工誤差、または基準尺を測定することにより判明した誤差をNC装置3の補助指令設定部3fからの補助指令によりピッチ誤差補正値に加減算して位置検出値を誤差補正する構成とされている。
(もっと読む)
モータ制御装置
【課題】ギャップ制御における異常を短時間で検知し、機器の破損を防止するモータ制御装置を提供する。
【解決手段】モータ2の位置を検出するエンコーダ3を用いて、位置指令とエンコーダ3の位置情報を比較することでモータ2の位置制御を行う位置制御器11と、モータ2で駆動されるワーク4と対象物の距離を測定するギャップセンサ5を用いて、ギャップ指令とギャップセンサ5からのフィードバック情報を比較することで、ワーク4と対象物間のギャップを一定に制御するギャップ制御器12と、ギャップセンサ12の有効範囲外では位置制御器11、有効範囲内ではギャップ制御器12に切り替えるモード切替器13と、モード切替器13とエンコーダ3とギャップセンサ5の情報から、モータ2を停止させる機能を備えた保護装置16とを備え、これらを同一の演算周期で動作させる。
(もっと読む)
機械装置のコントローラおよび原点復帰方法
【課題】機械装置の原点復帰において、センサやスイッチを使用せずに簡単に原点復帰が出来るようにするとともに、機械装置の安全性が高い原点復帰が出来る機械装置のコントローラを提供する。
【解決手段】可動体を移動させるモータ12と、経路上の所定位置で原点パルスを発生する位置検出器13と、モータ12を駆動するドライバ14と、ドライバ14に駆動指令を送るコントローラ15からなる機械装置のコントローラ15において、予め設定された移動量パラメータ値に基づいて、移動開始位置から、正負両方向に交互に可動幅を広げるように移動しながら原点位置をサーチし、原点位置を検出すると検出した原点位置に位置決めする原点復帰処理部25を備える。
(もっと読む)
サーボ制御装置
【課題】回転軸の慣性イナーシャが大きい場合や、回転軸が高速で回転する場合であっても、回転軸側と送り軸側との同期誤差を少なくすることができ、これにより高精度・高能率加工を行うことができるサーボ制御装置を提供する。
【解決手段】スピンドルモータ25に対する上位制御装置30からの指令及びスピンドルモータ25に設けられた検出器からフィードバックされたスピンドルモータ25の検出値の差である位置偏差と、送り側モータ26の上位制御装置30からの指令及び送り側モータ26に設けられた検出器からフィードバックされた送り側モータ26の検出値の差である位置偏差との差分である同期誤差に基づいて送り側モータ26の位置偏差を補正する補正データを算出する補正データ算出手段20を備え、補正データを送り側モータ26の位置偏差に加算し、同期誤差をゼロに近づける制御をする。
(もっと読む)
多関節型ロボットの制御方法
【課題】関節の各軸が軸ずれした場合でも、ロボットの動作を正常に復帰させる。
【解決手段】ロボット衝突後、ロボットコントローラは次のことを実行する。基準姿勢状態で各軸J1〜J6の補正用角度データJh(1)〜Jh(6)を得(ステップS1)、この角度データを不揮発性メモリ6に記憶させ、軸ずれ値ΔJ(1)〜ΔJ(6)を検出する(ステップS2)。そして、衝突前の各作業ポイントでのティーチングポイントデータP1〜Pnを軸J1〜J6の角度データに変換し(ステップS3)、各作業ポイントでのティーチング角度データの各軸角度データを前記軸ずれ値ΔJ(1)〜ΔJ(6)に基づいて補正し(ステップS4)、上記各作業ポイントでのティーチング角度データからティーチングポイントデータを得る(ステップS5)。
(もっと読む)
レーザ加工装置及びレーザ加工方法
【課題】 加工対象物の温度に応じて、適切な長さの被加工領域を加工することができるレーザ加工装置を提供する。
【解決手段】 レーザ加工装置は、表面に基準点及び参照点が画定され、加工対象物を保持し、外部から入力される制御信号に基づいて、加工対象物を移動させるステージと、ステージに保持された加工対象物にレーザビームを照射するためのレーザ光源と、基準点及び参照点の位置情報を取得するための位置検出器と、位置検出器により取得した基準点及び参照点の位置情報に基づいて、ステージが移動する移動距離を算出し、移動距離に基づいて、ステージを制御する制御装置とを有する。
(もっと読む)
1 - 13 / 13
[ Back to top ]