
Fターム[3C269JJ20]の内容
数値制御 (19,287) | 位置検出信号、位置検出手段の種類 (830) | 所定の位置、範囲のみで働く検出手段 (511) | 非接触式検出手段であるもの (185) | 撮像手段、画像処理手段であるもの (89)
Fターム[3C269JJ20]に分類される特許
1 - 20 / 89
ロボットの位置姿勢補間方法及びロボットの制御装置
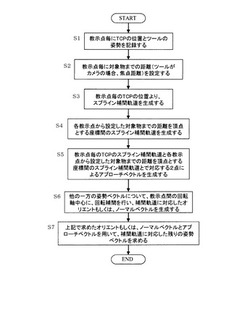
【課題】ロボットの手先の姿勢が一定の条件を満たすように補間できるロボットの位置姿勢補間方法を提供する。
【解決手段】各教示点を通過する移動軌跡がスプライン曲線となるように補間点を生成し(S3)、各教示点毎に、教示点と同じ座標系における撮像対象物の座標を求め、各教示点に対応する撮像対象物の座標間を、スプライン曲線により補間して補間点を生成する(S4)。教示点側の補間点を始点,撮像対象物側の補間点を終点とするアプローチベクトルを全ての補間点に対して求め(S5)、2つの教示点間の各補間点におけるノーマルベクトルの回転角を補間すると(S6)各補間点に立つアプローチ,ノーマルベクトルの外積よりオリエントベクトルを求め(S7)各補間点と3つの姿勢ベクトルの座標とから各補間点における手先の姿勢を決定する。
(もっと読む)
工作機械

【課題】被加工物を、容易に、且つ、短時間で測定して、当該被加工物を高精度に加工することができる工作機械を提供する。
【解決手段】主軸14に装着された工具TとワークWとを水平方向及び上下方向に相対的に移動させて、ワークWを工具Tにより加工する工作機械において、主軸14を回転可能に支持すると共に、上下方向に移動可能に支持されるサドル12と、ワークWを非接触で測定するワーク測定器30と、サドル12の側面に設けられ、ワーク測定器30を測定位置P1と退避位置P2との間で搬送する搬送装置15と、ワーク測定器30の測定結果に基づいて、ワークWに取付不良及び形状不良があるか否かを判定した後、この判定結果に応じて、工具T及びワークWの移動を制御するNC装置20とを備える。
(もっと読む)
ロボット教示方法、ロボット教示装置およびプログラム
【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
部品実装装置及び部品実装方法
【課題】撮像手段が基板加熱ヒータによって加熱される状況が、部品装着前の位置合わせ時と部品装着時とでほぼ一致するようにして部品の装着精度を向上させることができるようにした部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】治具部品載置部AR2に載置された治具部品JGを上方から撮像カメラ16により撮像して第1の撮像画像を取得するとともに、装着ヘッド15によりピックアップした治具部品JGを下方から撮像カメラ16により撮像して第2の撮像画像を取得して装置誤差を検出するとき、撮像カメラ16が基板加熱ヒータH2によって加熱される状況が、その後、部品3と部品装着部位2aとの位置合わせ時に撮像カメラ16が基板加熱ヒータH2によって加熱される状況に近くなるように治具部品載置部AR2の選択を行う。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
座標系校正方法及びロボットシステム
【課題】ロボットの手先座標系と視覚センサのセンサ座標系の相対的な関係を記述する関連情報としてパラメータを容易に校正できる座標系校正方法を提供すること。
【解決手段】ロボット30のロボット座標系35に一つのマーク10を配置し、視覚センサ20を取り付けたロボット30の手先を移動させて、視覚センサ20の姿勢を変えずに平行移動させた少なくとも第1から第3の3箇所の観測箇所と、マーク10に対して第1から第3の3箇所の観測方向と異なる方向でかつ相互に異なる方向からマーク10を臨む少なくとも第4及び第5の観測箇所で、マーク10の観測を行い、各観測箇所の画像を画像処理してマーク位置認識データを得て、各観測箇所でのロボット30の姿勢データとマーク位置認識データとを対応づけて取得し、両データに基づいて関連情報を校正する。
(もっと読む)
障害物回避支援装置、障害物回避支援方法及び移動体
【課題】最近接距離の点の切り替わりが発生する状況において、移動体の障害物の回避動作を支援するのに好適な障害物回避支援装置、障害物回避支援方法及び障害物回避支援装置を備えた移動体を提供する。
【解決手段】障害物回避支援部101を、レーザーレンジセンサ200で測定した障害物の距離情報をメモリに記憶する距離情報記憶部110と、メモリに記憶された距離情報に基づき斥力を計算する斥力計算部111と、計算された斥力を軸方向の成分に分離する斥力成分分離部112と、分離された軸成分から軸毎に正方向の最大値と負方向の最大値とを抽出し、軸毎に抽出した正方向と負方向の最大値の和を計算し、計算結果を各軸の軸成分とした回避用斥力を生成する回避用斥力生成部113とを含む構成とした。
(もっと読む)
加工装置、及び当該装置の駆動方法
【課題】簡素な構成で、かつ正確に加工工具の位置補正を行うことが出来る加工装置、及びその駆動方法を提供する。
【解決手段】本発明に係る三次元構造構成装置100は、観察ワーク12を取付け可能に構成された観察ワーク用台座11と、観察ワーク12を接触加工するバイト22を取付け可能に構成されたスピンドル21と、観察ワーク12の被加工面を観察する観察部31とを備え、バイト22により接触加工されかつ観察ワーク12とは異なるバイト高さ検出用ワーク14を取付け可能に構成された位置決めワーク用台座15と、バイト高さ検出用ワーク14の被加工面とバイト22との距離情報を取得し、得られた距離情報に基づき観察ワーク12の被加工面とバイト22との距離を補正する位置補正部とを備える。
(もっと読む)
加工装置における加工移動量補正値の決定方法
【課題】レーザ干渉計を用いることなく簡便に加工手段の加工移動量の補正値を求める。
【解決手段】切削手段40A,40Bのスピンドルヘッド部(加工部)42に取り付けた読み取り手段110によりチャックテーブル32に設置したスケール100,101の位置情報を読み取ってX・Y・X方向の実移動量を取得し、この実移動量と、各方向の移動量検出手段71〜73で検出される各可動ベース部22,52,62の検出移動量との差を加工移動量の補正値とする。
(もっと読む)
座標補正方法
【課題】タクトタイムの増加を防ぎつつ精度よく誤差を補正することを可能にする座標補正方法を提供する。
【解決手段】作業に先立って、各位置決めステージA、Bでの搬送手段4とマニピュレータ5、6を含む機械座標系に由来する誤差を検出して第1の補正テーブルを作成し、この第1の補正テーブルに基づいて作業時に機械座標系に由来する誤差を補正する第1の補正と、作業時に、いずれかの位置決めステージA、Bで、複数の作業対象物2、3のそれぞれの寸法公差に由来する誤差を検出して第2の補正テーブルを作成し、この第2の補正テーブルに基づいて各作業対象物2、3の寸法公差に由来する誤差を補正する第2の補正とによって、作業対象物2、3上の作業位置とエンドエフェクタ7、8の相対的な位置ズレを補正するようにした。
(もっと読む)
ロボットのキャリブレーション方法及びロボット用キャリブレーション装置
【課題】ロボットの作業効率、運用効率の低下等を招くことなくキャリブレーションの簡易な実行を可能にするロボットのキャリブレーション方法、及び該キャリブレーション方法の実施に用いられるロボット用キャリブレーション装置を提供する。
【解決手段】ロボットのキャリブレーション方法では、スカラーロボット11に対する相対位置の固定された治具12に対してその座標系の基準位置を示す位置確認孔43A,43Bを予め設けておき、スカラーロボット11の先端部に取り付けられた画像認識用のカメラ33により前記位置確認孔43A,43Bを認識するとともに、該認識された位置確認孔43A,43Bの位置に基づいてスカラーロボット11の先端部の座標系を調整するキャリブレーションを行なう。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行中に、対象物が検知された場合、視覚サーボ制御を実行する。装置は、この視覚サーボ制御を実行する上で、マニュピュレータの所定の状態に基づいて、視覚サーボ制御係数に含まれる係数の少なくとも一部を変更する(例えば実施形態におけるビジュアルインピーダンス制御の移動処理のステップS32,S33,S36,S37)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】マニュピュレータを対象物まで短時間で移動させること。
【解決手段】対象物であるボルト穴を視認可能なカメラが取り付けられたマニュピュレータを、複数の対象物まで移動させる制御を行う装置が、複数の対象物の各々の位置に対応させて予め設定された目標位置TPi’に向けて、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3)。装置は、マニュピュレータが目標位置TPi’に移動した場合、目標位置TPi’に対応する実穴位置Hiについての実誤差量diを検出する(ステップS5)。装置は、実誤差量d1乃至diの履歴のうち、少なくとも1回分の履歴を用いて、次のi+1回目の目標位置TPi+1’を更新する(ステップS10,S12,S13)。
(もっと読む)
情報処理方法及び装置並びにプログラム
【課題】高速、高精度、かつ制御系として安定に、マニュピュレータを対象物まで移動させること。
【解決手段】装置は、カメラが取り付けられたロボットアームを、対象物まで移動させる移動制御を行う。すなわち、装置は、対象物が検知されていない場合、対象物の位置に基づいて予め設定された目標位置までの経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS1)。装置は、対象物が検知された場合、目標位置よりも対象物に近い位置を新たな目標位置として、新たな目標位置までの新たな経路を設定して、移動制御を切り替えるための切替条件が満たされるまでの間、新たな経路に沿って、マニュピュレータを移動させるティーチングプレイバック制御を実行する(ステップS3及びS4)。装置は、切替条件が満たされた場合、視覚サーボ制御を実行する(ステップS5)。
(もっと読む)
キャリブレーション装置及びキャリブレーション方法
【課題】視覚センサを用いてロボットをキャリブレーションする場合に、構成が簡単で正確かつ容易にキャリブレーションが可能なキャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】アーム部と、前記アーム部の位置及び姿勢を検出する位置検出手段と、前記アーム部の位置及び姿勢を制御する制御部60とを備えたロボット5のキャリブレーション装置2であって、基準平面部に面内の方向を特定する複数の交差する溝部が形成され、前記溝部のうち交差する2つの溝部のそれぞれの側壁が接続される稜線が前記基準平面部に形成する角部のうち3つを校正点として有するキャリブレーション治具40と、視覚センサ12により撮像した前記キャリブレーション治具40の画像に基づき前記キャリブレーション治具40の位置及び姿勢を認識する物体認識装置10とを備えることを特徴とする。
(もっと読む)
1 - 20 / 89
[ Back to top ]