
Fターム[3C269MN44]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | 推論、AIの利用 (21)
Fターム[3C269MN44]に分類される特許
1 - 20 / 21
工作機械の熱変位補正方法および熱変位補正装置
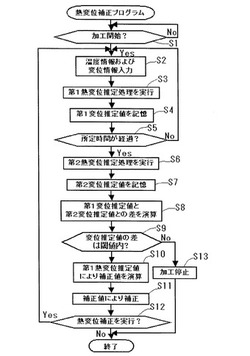
【課題】工作機械の熱変形に対し信頼性の高い熱変位補正が可能な工作機械の熱変位補正方法および熱変位補正装置を提供すること。
【解決手段】第1熱変位推定処理は、第2熱変位推定処理よりも処理時間が短く、熱変位推定値にリアルタイム性があるため、工作物の加工開始から継続的に実行される(ステップS1〜S4)。一方、第2熱変位推定処理は、多くの情報を処理する必要があるため第1熱変位推定処理よりも処理時間が長いが、多くの情報を処理する分、熱変位推定値に信頼性があるため、工作物Wの加工開始から定期的に実行される(ステップS5〜S7)。これにより、第1熱変位推定処理による熱変位推定値を、第2熱変位推定処理による熱変位推定値で監視することができ、相互補完して熱変位推定値の信頼性を向上させることが可能となる。
(もっと読む)
工作機械のテーブル又は工具を移動させる互いに直交した少なくとも二つの送り軸を有するサーボモータの駆動制御装置

【課題】学習制御による過剰な補正で生じうる被加工物の円弧切削時の被加工物の切削面の食い込みが生じないようにするサーボモータの駆動制御装置を提供する。
【解決手段】データ生成部5は、被加工物の円弧切削時に被加工物の切削面に食い込みが生じなくなるようにテーブルの円弧動作を行う際のサーボモータ2の送り軸の駆動方向の反転位置に対応して形成された突起部を有する円弧の座標データを生成し、座標データを位置指令としてサーボモータ駆動部3に送り出す。サーボモータ駆動部3は、位置指令とサーボモータ2の実際の位置との位置偏差に基づいて求めた速度指令をサーボモータ2に出力してサーボモータ2を駆動し、テーブルの円弧動作を繰り返し行わせる。学習コントローラ4は、位置指令に基づいて、サーボモータ2の送り軸の駆動方向の反転時の切削面の食い込みを回避した補正データを求める。
(もっと読む)
数値制御装置
【課題】ショートカット機能の使い勝手を向上させて、パラメータの閲覧又は編集を能率的に行う。
【解決手段】登録ショートカット情報に動作情報が設定されている場合(S12;Yes)、CPUは工作機械の動作情報を取得し、取得した動作情報に基づいて登録ショートカット情報を書き換える(S13)。登録ショートカット情報に直前操作画面情報が設定されている場合(S14;Yes)、CPUは、直前操作画面情報を取得し、取得した直前操作画面情報に基づき登録ショートカット情報を書き換える(S15)。S16においてCPUは、ショートカット先の画面の付属情報を取得し、取得した付属情報に基づき登録ショートカット情報を書き換える。S19においてCPUは、ショートカット先の画面の画面遷移情報を登録ショートカット情報に置き換え、置き換えられた画面遷移情報に基づいて画面を表示すると共に、ショートカット画面を消去する。
(もっと読む)
学習制御ロボット
【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
ロボットアームの制御プログラム及び制御システム
【課題】ハンド部を適切な位置に停止させることができるロボットアームの制御プログラムを提供する。
【解決手段】本発明に係るロボットアームの制御プログラムは、ロボットアームのハンド部を、把持対象物に向かって移動させる処理と、ハンド部に設けられた距離測定部に、ハンド部と把持対象物との距離を測定させる処理と、距離測定部がハンド部と把持対象物との距離の測定が不能となると、測定不能となる直前のハンド部と把持対象物との距離と、ロボットアームの関節部の角度から算出させた、測定不能となった後のハンド部の移動距離と、に基づいて、ハンド部と把持対象物との距離を推定させる処理と、推定させたハンド部と把持対象物との距離が閾値以下となると、ハンド部を把持対象物に向かって移動させる動作を停止させる処理と、をコンピュータに実行させる。
(もっと読む)
工作機械、その工作機械の熱流入量および温度分布を近似する方法ならびにその方法のためのプログラム
【課題】複雑構造を有する複合工作機械の熱変位補正の高精度化を図るため,工作機械機体の熱源熱量に基づいた熱変位補正式を構築し,その補正式による熱変位量補正方法を提供する。
【解決手段】被測定構造体の温度測定部における温度上昇量の測定結果から逆解析手法を用いて工作機械機体の熱源熱量を推定する手段と,その推定熱源熱量から工作機械機体の温度上昇分布を計算する手段と,工作機械機体の温度上昇分布から工作機械機体の熱変形を計算する手段と,工作機械機体の熱変位量と熱源熱量の関係に基づいて熱変位補正式を構築する手段とを有することを特徴とする工作機械であって,工作機械機体の構造を反映した熱変位補正式の構築が可能であり,工作機械機体の熱変位を高精度に補正することができる。
(もっと読む)
ロボットの制御方法
【課題】ワークの状態に応じてロボットの挙動を精度良く制御する方法を提供する。
【解決手段】ワークを移動するロボットの制御方法にかかわる。手部にワークを把持させてロボットを駆動するときの手部の挙動を検出し、複数種類のワークを移動するときのロボットの挙動に関する情報を記憶する学習工程と、ワークの属性を検出する属性検出工程と、ワークの属性と挙動の情報とを用いてロボットの制御条件を設定する制御条件設定工程と、ロボットがワークを移動する移動工程と、を有する。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
工作機械のNCデータ作成装置
【課題】加工品質を向上させることのできる工作機械のNCデータ作成装置の提供。
【解決手段】NCデータ作成装置3は、ボールエンドミルの基準のワーク座標系NCデータと、これが補正された複数の補正用のワーク座標系NCデータを作成する。基準のワーク座標系NCデータおよび補正用のワーク座標系NCデータは、機械座標系NCデータに変換された後、各駆動軸の加速度が算出される。算出された駆動軸の加速度同士は、最優良NCデータ決定部36において比較され、基準のワーク座標系NCデータおよび補正用のワーク座標系NCデータの、それぞれに基づき算出される複数の駆動軸のそれぞれの最大加速度のうちで最も大きい加速度が最も低いものを、基準のワーク座標系NCデータおよび補正用のワーク座標系NCデータの中から最優良NCデータとして抽出される。NCデータ出力部37は、抽出された最優良NCデータをNC工作装置5へと出力する。
(もっと読む)
レーザ溶接システムの異常検出方法
【課題】異常要素を簡易且つ精度よく検出する。
【解決手段】基準用ワークに溶接部を形成すると共に、その際の溶接状態に関する基準用状態データを取得し、基準用状態データを正規化することで基準用正規化データを求め、基準用正規化データに基づいてMTシステムのSN比を算出し、このSN比をニューラルネットワークに教師データとして適用する(S11〜15)。そして、かかるSN比の適用を複数の基準用被加工物に対して実施することで、ニューラルネットワークモデルを構築する(S16)。続いて、加工用ワークに溶接部を形成すると共に、その際の溶接状態に関する加工用状態データを取得し、加工用状態データを正規化することで加工用正規化データを求め、加工用正規化データに基づいてMTシステムのSN比を算出し、このSN比及び構築したニューラルネットワークモデルに基づいて異常要素を検出する。
(もっと読む)
サーボモータの駆動制御装置及び駆動制御方法
【課題】少ないメモリのCPUでも学習制御を可能とし、さらに学習時間の短縮を実現可能なサーボモータの駆動制御装置を提供する。
【解決手段】駆動制御装置10は、位置ループ制御系に追加された学習制御部24を有し、学習制御部24は反転動作前後の所定時間に限って学習制御を行うように構成されている。学習制御によって得られる速度指令を解析して求められる速度補正データは、反転動作時に発生する位置偏差を低減すべく速度指令の補正を行うために使用される。
(もっと読む)
ロボットマニピュレーターの制御装置及びその制御方法
【課題】 マニピュレーターの関節加速度を利用しなくても、マニピュレーターに作用する外乱トルクを正確に推定できるロボットマニピュレーターの制御装置及びその制御方法を提供する。
【解決手段】 マニピュレーターの関節位置と関節トルクを感知する感知器と、前記感知された関節位置と関節トルクを入力とする前記マニピュレーターに対する状態空間方程式を用いて外乱トルクを推定する外乱推定器と、前記推定された外乱トルクに基づいて前記マニピュレーターを制御する制御器とを含んでロボットマニピュレーターの制御装置を構成する。
(もっと読む)
ロボット動作計画方法及び装置
【課題】CP制御を行うロボットに関する動作計画方法及び同方法を用いる装置において、冗長性を利用できる範囲内での姿勢変化を解としてメタヒューリスティックス手法を適用して、作業経路の全ての点において障害物を回避できる動作計画を自動作成する。
【解決手段】本発明に係るロボット動作計画方法は、ロボットの自由度が作業に必要な自由度より大きい場合に、エンドエフェクタがワークに設定された作業経路上の複数目標点間を順次補間して動作するためのロボット各軸の速度を分解速度制御法を用いて導出する方法であって、一つの目標点からその次の目標点への動作にて、上記各軸速度の冗長自由度成分が、ロボット上の任意の位置に設定された座標系での上記エンドエフェクタの速度ベクトルを満たす各軸速度成分を含むことを特徴とする。
(もっと読む)
工作機械用制御装置
【課題】ワークの種類毎にねじれ剛性の調整をすることなく、一対のサーボモータ間の干渉を抑制する制御を行うことができ、高精度加工を能率良く実施できる工作機械用制御装置を提供する。
【解決手段】一対のサーボモータ7a,7bの相互干渉を抑制するための非干渉補正器10を備え、この非干渉補正器10が、一対のサーボモータからそれぞれ検出された位置フィードバック値FB1,FB2の差分値と、ワークにねじれが生じるように、一対のサーボモータに対して与えられたねじり剛性測定用のトルク指令値とに基づいてワークのねじり剛性を推定するねじり剛性推定ブロックと、一対のサーボモータからそれぞれ検出された速度フィードバック値FB3,FB4の差分値と、ねじり剛性推定ブロックにより推定されたねじり剛性とに基づいて、一対のサーボモータのトルク指令値を補正するためのトルク指令補正値を推定するトルク指令値補正ブロックと、を備える。
(もっと読む)
工作機械の制御装置
【課題】工作機械の加工動作前に、自動的にエネルギー使用効率を最大とする加工条件を算出して、工作機械を動作させることができる工作機械の制御装置を提供する。
【解決手段】マシニングセンタ10に、与えられた工具軌跡に沿って切削加工に必要なエネルギーを算出する手段と、工作機械を構成する機械要素のエネルギー消費の仕方をモデル化した工作機械エネルギー消費モデルにより、前記工具軌跡による加工時間と、先に算出した切削に必要なエネルギーから当該加工に必要なエネルギーを算出す手段、及び加工に必要なエネルギーが最小となる加工条件を算出する手段とを設け、与えられた工具軌跡において、算出された加工条件でマシニングセンタ10を制御する工作機械の制御装置である。
(もっと読む)
ロボットシスシステム及びロボット制御装置
【課題】所望の時刻での位置を高精度に推定することが可能なロボットシスシステム及びロボット制御装置を提供する。
【解決手段】 モータによって所定部位が動作するロボット2と、モータをサーボ制御するサーボ制御器と、個々のサーボ制御器21等に対して動作指令を送信するロボット制御装置1と、を有するロボットシステムにおいて、ロボット2には、モータの回転角度に基づく位置データを検出するセンサと、が設けられ、ロボット制御装置1には、サーボ制御器21等への動作指令を生成するとともに、位置データを受信するホスト制御器10と、現在又は将来の位置データを推定する推定器13と、が設けられ、推定器13は、動作指令とサーボ制御器21等のサーボ制御パラメータを使用したシミュレータ出力を、既に知られた過去の位置データで補正することによって、現在又は将来の位置データを推定する。
(もっと読む)
加工監視装置
【課題】加工しているワークの材質の変化を検出可能とし、ワークに異物が混入している場合やワークに材質のむらがある場合などの対応を可能とする。
【解決手段】センサ部2は加工装置Xの振動を検出し信号入力部3を通して対象信号を特徴量抽出部4に与える。特徴量抽出部4は振動の特徴量を抽出する。特徴量抽出部4で得られた特徴量は、競合学習型ニューラルネットワーク1aを備える材質検出部1に入力され、競合学習型ニューラルネットワーク1aにより特徴量からワークWの材質が分類される。クラスタ判定部1bではワークWの材質を判断し、出力部6に設けた速度制御手段6bではワークWの硬さに応じてワークWの送り速度と加工装置XによるワークWの切断速度との少なくとも一方を調節する。
(もっと読む)
工作機械監視装置
本発明は、工作機械(10;82)において使用状況を識別するための識別ユニット(22)を有する工作機械監視装置に関する。前記工作機械(10;82)の少なくとも1つの部品(16;88)を、前記識別ユニット(22)の送信信号および/または受信信号に対する反射器として使用することを提案する。  (もっと読む)
(もっと読む)
工作機械監視装置
本発明は、工作機械監視装置に関する。この工作機械監視装置が、超広帯域動作のために設けられている信号ユニット(24;72)を少なくとも1つ有することが提案される。  (もっと読む)
(もっと読む)
ロボットアーム診断装置
【課題】ロボットアームの異常をより正確に検出することを可能とする。
【解決手段】駆動電流から実際の駆動トルクを算出するトルク算出手段10,11と、指令位置情報から駆動トルクを算出するとともに、トルク変動パラメータにより駆動トルクを補正して駆動トルクを推測するトルク推測手段10,11と、他の演算処理部10,11において推測された推測トルクを取得する推測トルク取得手段10,11と、推測した推測トルクと取得した推測トルクとの一致判断を行う推測トルク一致判断手段10,11と、推測トルクが一致すると判断された場合に、推測トルクと算出された実際の駆動トルクとの差を算出するトルク差算出手段10,11と、算出されたトルクの差が所定値以上である場合又は推測トルクが一致しないと判断された場合に、切り替え部18,19によりサーボモータ24への電力供給を遮断する電力遮断手段10,11と、を有する。
(もっと読む)
1 - 20 / 21
[ Back to top ]