
Fターム[3C269PP01]の内容
数値制御 (19,287) | 安全手段、異常対策、保護 (667) | 異常、故障発生後に所定の処置を施すもの (378)
Fターム[3C269PP01]の下位に属するFターム
警報、表示 (161)
制御対象の動作停止 (158)
初期化、リセット (6)
再試行 (19)
動作モードの変更、変更禁止 (13)
Fターム[3C269PP01]に分類される特許
1 - 20 / 21
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
学習制御ロボット

【課題】本発明は、学習制御機能を持つロボットの学習稼動の動作中、もしくは学習後の実稼動の動作中に例外処理が起きた場合に対処可能な学習制御ロボット及び再学習可能な学習制御ロボットを提供することを目的とする。
【解決手段】本発明の学習制御ロボットは、ロボット機構部と、作業プログラムを実行することにより、ロボット機構部の位置偏差に関するデータを取得して、ロボット機構部の位置偏差を所定の値以下とするための学習補正量を計算する学習制御を実行する学習制御部と、学習制御の実行中に、データを取得するためにロボット機構部の学習稼動を実行し、学習制御の実行後に、学習制御部が計算した学習補正量に基づいて、ロボット機構部の実稼動を実行する通常制御部と、学習稼動の実行中又は実稼動の実行中において例外処理が起きた場合に、例外対処を実行する例外対処部と、を有することを特徴とする。
(もっと読む)
移設検出システム
【課題】複数の機械の移設を監視し、移設を検出した場合に機械の稼動を禁止できる移設検出システムを提供する。
【解決手段】移設検出装置20の移設検出I/Fに対して数値制御装置1A〜1Cを配線11A〜11Cで接続する。移設検出装置20には、数値制御装置1A〜1Cの固有IDを記憶しておく。数値制御装置1A〜1Cの起動時に自身の固有IDが移設検出装置20に記憶されていなければその数値制御装置の起動を禁止する。移設検出装置20が振動を検出した場合は全ての数値制御装置1A〜1Cの起動を禁止する。これにより複数の数値制御装置1A〜1Cをまとめて監視できる。
(もっと読む)
数値制御装置、数値制御装置の制御プログラム及び記憶媒体
【課題】タップ加工中に加工が中断されて再開するときに、ワークから工具を無理なく抜くことができる数値制御装置、数値制御装置の制御プログラム及び記憶媒体を提供する。
【解決手段】タップ動作中にタップ戻し情報がバックアップRAMに記憶される。停電時にタップ動作が中断した後で、電源復帰時にはタップ戻し情報に基づき主軸9を逆回転させながらタップ動作開始位置よりも低い位置で停止させるインチング動作が実行される。この動作を断続的に行うことでワークから工具を剥がすことができ、ワークと工具の状態を確認しながらタップ戻し動作を実行できる。
(もっと読む)
数値制御装置、数値制御装置の制御プログラム、記憶媒体及び数値制御装置の制御方法
【課題】タップ加工中に加工が中断されて再開するときに、ワークから工具を確実に抜くことができる数値制御装置、数値制御装置の制御プログラム、記憶媒体及び数値制御装置の制御方法を提供する。
【解決手段】タップ動作中にタップ戻し情報がバックアップRAMに記憶される。停電時にタップ動作が中断し、電源復帰時には主軸9を逆回転させながら上昇させるタップ戻し動作が実行される。このタップ戻し動作の前に主軸9をワークに向けて移動させるZ軸下降動作が実行される。これにより主軸と工具との間の隙間をなくすことができるので、タップ戻し動作を良好に行うことができる。
(もっと読む)
ボールエンドミル加工システム、ボールエンドミル加工装置、CAM装置およびボールエンドミル加工方法
【課題】
ボールエンドミル加工時のびびり振動を抑制する加工システム、装置あるいは方法を提供する。
【解決手段】
角度決定部25では、角度決定ルーチンにより被削材66に対するボールエンドミル68の目標角度が決定される。角度決定ルーチンでは、S100において、操作者による入力があったか否かが判断され、入力があった場合はS120に進み、びびり振動の原因としてボールエンドミル68の低剛性が特定されたか否かが判断される。びびり振動の原因としてボールエンドミル68が特定された場合はS140に進み、ボールエンドミル68の軸線と被削材66の法線の角度が小さくなるように、目標角度が調整される。一方、S120において否定判断された場合、すなわち、びびり振動の原因として被削材66の低剛性が特定された場合はS130に進み、ボールエンドミル68の軸線と被削材66の法線の角度が大きくなるように、目標角度が調整される。
(もっと読む)
機械の移設防止機能を有する数値制御装置の機能回復システム
【課題】機械の移設防止機能を有する数値制御装置の機能を回復するシステムを提供すること。
【解決手段】FROM6には設置位置情報と許容移動距離とが入力デバイス12から入力され格納されている。GPSユニット13からはGPS用インタフェース4を介して位置情報が数値制御装置1に入力されSRAM3(図2参照)に格納される。プロセッサ2はFROM6に格納されたプログラムを読み出し、位置情報と設置位置情報から移動距離を算出し、算出した移動距離が許容移動距離範囲内か否か判断し、移動距離が許容移動距離範囲内であれば、数値制御装置1の機能回復処理を実行する。
(もっと読む)
ロボットの教示装置およびロボットシステム
【課題】ワークを対象物の穴に挿入する作業やギヤの位相を合わせながら嵌め合わせ作業を行う組み立て作業ロボットの、簡便、確実で安全な教示装置を提供する。
【解決手段】押圧を設定するための押圧設定手段55と、押し圧力を表示する作用力表示手段56と、探索移動量の指令値と実際値の偏差を表示する探索移動量表示手段57と、ロボットの力制御を実現する力制御手段65と、探索動作時の押し圧を調整するための押し圧変更調整手段631と、を備える。ロボットアーム先端に取り付けたエンドエフェクタに保持されたワークを対象物に挿入作業を行うロボットの教示において、教示作業者は作用力表示手段56に表示される押し圧力と、探索移動量表示手段57に表示される偏差とに基づいて前記押し圧設定手段55を操作することで、探索動作中に押し圧の調整が可能とする。
(もっと読む)
工作機械の異常復旧支援システム及び支援方法
【課題】工作機械の運転中に異常が発生したとき、オペレータがその原因を探し出して正常状態に復旧する作業を支援する技術に関し、異常メッセージや推定原因リストの表示及び状態センサの異常判定値を常に最適なものに更新する技術手段を提供する。
【解決手段】工作機械メーカに設置されたサーバー1と、ユーザ側に設置されている多数の工作機械2のNC装置4とをインターネット6で接続して、各工作機械2・・・の異常発生状態及びその原因をサーバー1に収集して蓄積し、その蓄積されたデータに基づいて異常メッセージ及び推定原因リストの内容や状態センサの異常判定値の設定値を適切なものに更新し、当該更新されたデータをインターネット6を通じて各機械のNC装置4に配信して、個々のNC装置4に設定されているこれらのデータを上書き更新する。
(もっと読む)
移設検出機能を備える数値制御装置
【課題】数値制御装置が移設されたことをより確実に判断できるようにした。
【解決手段】数値制御装置10の搬送等による変動を複数の変動検出手段11a、11bで検出する。移設判断手段12は、数値制御装置の変動を示す変動検出手段での出力と、各基準値とをそれぞれ比較し、いずれかの変動検出手段の出力が基準値を超えると移設検知信号を出力する。一方の変動検出手段の11bの出力を他方の変動検出手段11aの出力の物理量に物量変換手段14で変換する。同一次元の物理量で第1、第2の変動検出手段11a、11bの出力の誤差を誤差判断手段15で求め、誤差が設定値を超えるときは誤差拡大信号を出力する。移設検知信号又は誤差拡大信号が出力されたときは、使用禁止手段13によって数値制御装置を使用できないようにする。複数の変動検出手段の出力と変動検出手段の出力の誤差によって、より確実に数値制御装置の移設を検出できる。
(もっと読む)
ロボットの原点復帰方法
【課題】停止位置から作業原点位置までロボットを復帰させるに際し、システムの負荷を増大させることなく、簡易な方法で原点復帰を行うことができるロボットの原点復帰方法を提供する
【解決手段】ロボットの動作に干渉する干渉エリア10bとロボットが動作する動作エリア10aとを含むマトリックス状のエリアマップ10に、マス毎にロボットの復帰方向を設定しておき、設定された復帰方向に基づいて停止位置からの復帰経路を設定して、かかる復帰経路に基づいてロボットを移動させ、最終的に原点復帰させる。ロボットの復帰方向が設定されていれば(S33)、現在のロボット位置がどこであっても、ロボットを原点復帰することができる。
(もっと読む)
制御装置、制御方法及びプログラム
【課題】本発明は、ロボットの衝突後の運動を早い応答且つ簡易に実現可能な制御装置を提供する。
【解決手段】複数の関節及び複数のリンクを有する可動部と、複数の関節の少なくとも一つを駆動するアクチュエータ4と、アクチュエータ4の可動範囲を記憶する記憶装置5と、可動範囲内においてアクチュエータ4の制御目標値を生成する目標値生成部13と、制御目標値にしたがってアクチュエータ4を駆動させる駆動部14と、物体との接触又は衝突を検出する検出器3と、検出結果から、力が加えられた方へのアクチュエータ4の動作を制限するように可動範囲を変更する可動範囲変更部12とを備える。
(もっと読む)
数値制御装置および数値制御プログラム
【課題】複数のCPUが共通にアクセス可能な共通RAMを有する制御基板が故障したとしても、当該故障した制御基板を交換後において、故障復旧のための操作性を向上する。
【解決手段】NC基板(メインCPU5およびローカルCPU7が共通にアクセス可能な共通RAMを有する制御基板)の故障が検出されると(ステップS63:YES)、当該共通RAMに記憶されている情報を、ローカル基板(故障したNC基板とは別の制御基板)に設けられたUSBに転送し記憶するアラーム/バックアップ処理が実行される(ステップS64)。
(もっと読む)
ロボット制御装置、ロボット制御方法及びロボット搬送装置
【課題】ロボットハンドがワークに干渉することがなく、退避点(作業基準位置)に戻るまで短い時間で迅速に移動させることができ、さらにプログラムの管理が容易なロボット制御装置を提供する。
【解決手段】プログラムを複数の動作区間に分割すると共に、分割された各動作区間に対して迂回動作の種別を指定する退避点復帰管理手段13と、動作経路命令を実行する際に、動作区間が、後退移動区間であるときには、この動作経路命令を動作経路記憶手段11に記憶しておき、中断停止入力があった際に、動作区間が、後退移動区間であるときに、動作経路記憶手段11に記憶されている動作経路命令を逆順に実行した後、退避点に復帰させるロボットプログラム実行手段7とを有している。
(もっと読む)
多軸制御システムおよび瞬時リセット監視方法
【課題】従来のシリアル通信を利用した多軸制御システムでは、1または複数のスレーブ機器において瞬時リセットが発生した場合、マスタ機器が該瞬時リセットの発生を検出できない恐れがあるという問題があった。
【解決手段】スレーブ機器は、通信ICの内部に瞬時リセット監視ビットを備える。多軸制御システムが起動された後、スレーブ機器は、マスタ機器から要求があった時に該瞬時リセット監視ビットを設定する。その後、瞬時リセットが発生した時に該瞬時リセットビットはクリアされる。該該瞬時リセット監視ビットはマスタ機器からの指令に対する応答データの1部のステータスの1つとして周期的にマスタ機器へ送信される。
(もっと読む)
加工再開機能を備えた数値制御装置
【課題】メモリ容量を増大させることなく、かつ加工再開までの時間を短縮した加工再開機能を備える数値制御装置を提供する。
【解決手段】加工中断時の数値制御装置の内部状態を復元するために実行する必要がなくスキップするサブプログラム等のプログラム部をその番号等で登録しておく。内部状態を復元する際、読み出したブロックがスキップするプログラム部でないときのみ、機械を動かさずに実行し、機械座標位置等の内部状態を更新記憶する(b5)。又、ブロック位置を示すポインタを更新する(b8)。ポインタが、加工中断時のポインタの値と等しくなり、中断ブロックに達したことが判別すると(b7)、加工中断時に記憶していた補間情報等の内部状態を復元し(b9)、加工を再開する(b10)。必要のないプログラムをスキップするから処理時間が短縮できる。又、必要なメモリ容量も少なくてすむ。
(もっと読む)
数値制御装置
【課題】工作機械のアラーム発生時に、アラーム要因特定を容易にする。
【解決手段】運転開始後、アラーム検出が有れば運転を停止し、アラーム番号を出力し、表示装置の画面上に表示する(S1、S2)。アラーム番号に対応する関連信号を特定し(S3)、信号登録手段に登録されている各信号についてはアラーム発生前後の信号状態の推移を表示装置の画面上に表示する。未登録の信号は信号登録手段にエントリする(S4〜S7)。所定時間内にアラームが解除され、運転再開されれば、信号登録手段に登録されている信号について、信号データの記録を開始(または継続)する(S8〜S10)。所定時間内に運転再開されなければ処理は一旦終了する。
(もっと読む)
工作機械の制御装置
【課題】移動体と構造体の位置関係などをオペレータが容易に把握することができる工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、画面表示処理部19と、構造体のモデルにその外形形状を外側にオフセットして得られる1以上の干渉危険領域を設定した後、移動体移動後のモデルデータを生成して、移動体が干渉危険領域内に侵入するか否かを確認し、侵入を確認すると、その侵入位置及びどの干渉危険領域内に侵入するのかを示す信号を画面表示処理部19に送信する移動状態認識処理部18とを備える。画面表示処理部19は、移動状態認識処理部18によって生成されたモデルデータを基に、これに応じた画像データを生成して画面表示装置43に画面表示させるとともに、侵入位置が画面表示装置43の中央部に、侵入する干渉危険領域に応じた表示倍率で表示されるように画像データを生成して拡大表示させる。
(もっと読む)
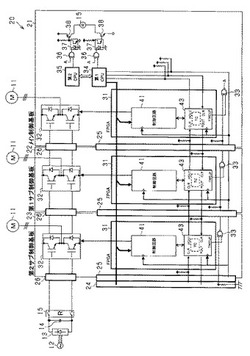
駆動軸制御システムおよびその非常時の動作方法
【課題】 駆動軸制御機器の動作状況によって非常時の対処内容を変更できる駆動軸制御システムおよびそのおける非常時の動作方法を提供する。
【解決手段】 駆動軸制御機器4と、駆動軸制御機器4の動作を監視する制御監視用パネル1と、通信媒体3とを備えた駆動軸制御システムにおいて、駆動軸制御機器4に非常時に動作する非常時動作プログラムを複数格納する非常時動作プログラム格納部7と、非常時動作プログラムを選択する選択情報を格納する非常時動作選択情報格納部6と非常時動作選択情報格納部6の内容を設定する非常時プログラム選択部9を備え、制御監視用パネル1から非常時用の信号を駆動軸制御機器4に送ると、非常時動作選択情報格納部6の内容に従って、非常時動作プログラムを実行する。
(もっと読む)
機械制御装置
【課題】可搬式操作部と機械の制御を行う制御部間の通信を非有線で行う際、単一の故障で機械の非常停止動作の安全機能が損なわれることのないように多重化されたハードウエア回路と最小限の通信回路を有しながら信頼性を確保した通信プロトコルによって信頼性の高い非常停止通信を行うことができる機械制御装置を提供する。
【解決手段】ロボット制御装置30は、制御部20における第3CPU22、第4CPU23のそれぞれが、通信データに含まれるモニタ結果及び予め定められた通信プロトコルに従って作成された通信エラー検出データを解析する。そして、第3CPU22、第4CPU23がモニタ結果及び通信エラー検出データの解析結果に応じて第1電磁接触器制御回路26、第2電磁接触器制御回路27にOFFの制御信号を出力することにより、モニタ結果や通信エラーの内容に応じてロボットのモータM41への電力が遮断される。
(もっと読む)
1 - 20 / 21
[ Back to top ]