
Fターム[3C269PP03]の内容
数値制御 (19,287) | 安全手段、異常対策、保護 (667) | 異常、故障発生後に所定の処置を施すもの (378) | 制御対象の動作停止 (158)
Fターム[3C269PP03]に分類される特許
1 - 20 / 158
工作機械
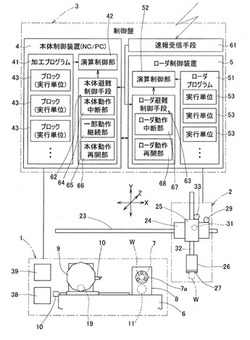
【課題】 地震による損傷を防止すると共に、緊急地震速報が誤報であった場合にも、作業者よる加工再開の操作を必要とせずに加工が再開できて、加工精度が低下することを抑えることができ、かつワークに加工中断の痕跡を残すことがないようにする。
【解決手段】 本体制御装置4に、速報受信手段61による緊急地震速報の受信に応答して、工作機械本体1に一連の避難動作を行わせる本体避難制御手段62を設ける。この手段62は、現在実行中の実行単位43の終了後に加工プログラム41の実行を中断し、工作機械本体1に退避動作を行わせる本体動作中断部62を有する。また、前記中断の後、定められた経過時間後に、工作機械本体1を退避動作前の状態に戻すと共に、加工プログラム41の実行を再開させる本体動作再開部66を有する。
(もっと読む)
少なくとも1つの共通の領域を含むそれぞれの作業スペースを有する少なくとも2台のロボットを制御する方法

【課題】2台のロボットを制御する方法であって、共通作業領域におけるロボット間の干渉を防止する。
【解決手段】作業スペースは、存在する物体を考慮して単純な形状によって構成された、禁止干渉領域、監視干渉領域、ハイブリッド干渉領域に分類される干渉領域を規定することによってモデル化される。各ロボット3,4は、ハイブリッド干渉領域に進入するときに、進入予約の第1出力信号、および進入/存在の警告の第2出力信号を中央電子制御ユニット7に送信するように構成され、ハイブリッド干渉領域のステータスは、ハイブリッド干渉領域に他のロボット3,4が存在するか否かに応じて、ハイブリッド干渉領域をロボット3,4に対して監視または禁止された状態にするロボット3,4への入力信号を、中央電子制御ユニット7から送信することによって、ロボット3,4の動作中に、各ロボット3,4に対して動的に変更される。
(もっと読む)
速度監視装置
【課題】低い分解能の位置センサが使用でき、かつ誤検出せずに高速応答可能な速度監視装置を提供する。
【解決手段】速度監視装置は、記憶手段に、許容移動マージンPMと、1周期期間で許容される前記可動部の最大移動距離である比較速度量VCと、現在の時刻tからM周期前までにおける前記可動部の位置データP(t−nT)(nは、M以下の自然数)と、を記憶しておく。速度判定の際は、1からMまでのすべての整数nに対して、|P(t)−P(t−nT)|>VC*n+PMの成否を判定し(STEP6)、当該不等式が成立した場合には、速度超過と判定する(STEP20)。
(もっと読む)
侵入検出装置,ロボット,侵入検出方法および侵入検出プログラム
【課題】特定領域への侵入を遅延無く検出する。
【解決手段】侵入検出装置は,侵入検出装置は,侵入を検出する境界に沿って前記境界に近接して配列された複数の光マークからなる光マーク列と,光らせる前記光マークを時刻によって異らせる制御信号であって,任意の時刻において,前記光マーク列の一部に対応する前記制御信号の一部は,前記光マーク列の他の一部に対応する前記制御信号の他の一部の誤り検出符号である前記制御信号を生成する点滅制御部と,前記光マーク列からの光を受光し前記光に応じた信号を出力する光センサーと,前記光センサーが出力する信号を前記光マーク毎に二値化した受光信号を生成し,前記光マーク列の他の一部に対応する前記受光信号の第一部分に基づいて前記誤り検出符号の検査値を生成し,前記光マーク列の一部に対応する前記受光信号の第二部分と前記検査値とを比較した結果に基づいて前記侵入を検出する検出部と,を備える。
(もっと読む)
異常判定装置、駆動装置及びロボット装置
【課題】異常判定をより短時間に行う。
【解決手段】被駆動部を駆動する駆動装置を動作させる動作電流の電流値を複数の動作パターンを有する駆動装置の動作に応じて検出する検出部と、検出部によって検出された電流値と、動作パターンごとに関連付けて予め設定された動作電流の許容範囲とに基づいて、駆動装置の動作が異常であるか否かを判定する判定部とを備える。
(もっと読む)
ロボット制御装置、外乱判定方法およびアクチュエータ制御方法
【課題】ロボットアームに加わる外乱を高精度に検出することが可能なロボット制御装置、外乱判定方法およびロボット制御方法。
【解決手段】実施形態のロボット制御装置は、アームの駆動軸を回転駆動するアクチュエータと、前記駆動軸の回転角度をサンプリング周期ごとに検出する第1検出部と、前記アクチュエータの駆動トルクの推定値と、前記駆動トルクの真値との差分を算出する算出部と、前記アームに加わる外乱を検出する第2検出部とを備え、前記第2検出部は、前記差分を変数とする時系列モデルのパラメータを推定し、前記パラメータを当てはめることで、第1サンプリング周期の当該時系列モデルを更新する更新部と、前記第1サンプリング周期の時系列モデルと前記第1サンプリング周期よりも過去の第2サンプリング周期の時系列モデルとを比較して、前記アームへの外乱の有無を判定する判定部とを備える。
(もっと読む)
工作機械の衝突防止方法
【課題】工作機械の動作中に移動する主軸台のカバーと工具との衝突を確実に、かつオペレータに過度の負担をかけることなく簡単に防止できる工作機械の衝突防止方法を提供する。
【解決手段】主軸方向であるZ軸方向に移動可能な移動主軸と、当該移動主軸を軸支する移動主軸台と、Z軸方向及びZ軸に直交するX軸方向に移動可能な少なくとも一つの刃物台と、当該刃物台に取り付けられた工具タレットとを備える工作機械の衝突防止方法であって、前記移動主軸台と前記刃物台とのZ軸方向の相対距離が予め規定しているZ軸方向の許容値以下であることを検出する第一のステップと、次にその時点で加工位置に割出されている工具のX軸方向の刃先位置が、前記移動主軸台のカバーのX軸方向の長さに基づいて予め規定しているX軸方向の許容値以下であることを検出する第二のステップと、次に前記移動主軸台の移動を停止する第三のステップを備える。
(もっと読む)
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
エアバランスを利用して退避動作を行う位置決め装置
【課題】外部の動力に依存することなく、新たな制御回路を追加することもなく、ブレーキが動作する条件で、確実に垂直軸に退避動作をさせることができる位置決め装置を提供すること。
【解決手段】固定部20に対して可動部21が鉛直方向に対して上下に移動する構造であり、圧力調整装置46はエア源(コンプレッサ)44に接続され、圧縮空気がエア配管60を介してエア源44から圧力調整装置46に供給され、圧力調整装置46に供給された圧縮空気はエアバランスの配管80を介してエアバランスに供給され、制御装置40からの圧力調整を指令する電気信号が圧力調整の信号線80を経由して圧力調整装置46に入力し、圧力調整装置46の動作が制御され、非常停止スイッチ42は手動で緊急停止させるためのスイッチであり、これが押されると制御装置40の制御が切れて非常停止状態となる。
(もっと読む)
ロボットの故障検出方法、ロボット
【課題】ロボットの故障検出方法を提供する。
【解決手段】ロボット1の故障検出方法は、関節J1〜J6と、これら関節に連結されるアーム13〜18と、関節J1〜J6それぞれの回転角度を検出するエンコーダー40と、アームのいずれかに取り付けられたジャイロセンサー30と、を有するロボットの故障検出方法であって、エンコーダー40またはジャイロセンサー30の異常を判定する閾値を決定する工程と、エンコーダー40によって関節角度を取得する工程と、関節角度を近似微分して関節角速度を算出する工程と、関節角速度をジャイロセンサー位置の座標系角速度に変換する工程と、ジャイロセンサーによって角速度を取得する工程と、ジャイロセンサーにより取得した角速度と座標系角速度との角速度差、または角速度比を演算する工程と、角速度差、または角速度比と、閾値とを比較する工程と、を含む。
(もっと読む)
工作機械の熱変位補正方法および熱変位補正装置
【課題】工作機械の熱変形に対し信頼性の高い熱変位補正が可能な工作機械の熱変位補正方法および熱変位補正装置を提供すること。
【解決手段】第1熱変位推定処理は、第2熱変位推定処理よりも処理時間が短く、熱変位推定値にリアルタイム性があるため、工作物の加工開始から継続的に実行される(ステップS1〜S4)。一方、第2熱変位推定処理は、多くの情報を処理する必要があるため第1熱変位推定処理よりも処理時間が長いが、多くの情報を処理する分、熱変位推定値に信頼性があるため、工作物Wの加工開始から定期的に実行される(ステップS5〜S7)。これにより、第1熱変位推定処理による熱変位推定値を、第2熱変位推定処理による熱変位推定値で監視することができ、相互補完して熱変位推定値の信頼性を向上させることが可能となる。
(もっと読む)
駆動軸共有装置および駆動軸共有方法
【課題】専用の制御装置を用いることなく、1つの共有駆動軸を複数の制御装置によって駆動制御することができ、構造が簡単であるとともに、低コストで実現することが可能な、駆動軸共有装置および駆動軸共有方法を提供する。
【解決手段】駆動軸共有装置10は、共有駆動軸20と、共有駆動軸20に連結され、共有駆動軸20を駆動する第1の駆動装置31および第2の駆動装置32とを備えている。第1の駆動装置31および第2の駆動装置32は、第1の制御装置40および第2の制御装置50によってそれぞれ制御される。第1の制御装置40は、第2の駆動装置32によって共有駆動軸20が駆動されていないとき、第1の駆動装置31により共有駆動軸20を排他的に駆動する。第2の制御装置50は、第1の駆動装置31によって共有駆動軸20が駆動されていないとき、第2の駆動装置32により共有駆動軸20を排他的に駆動する。
(もっと読む)
異常時モータ減速停止制御機能を有する制御装置
【課題】数値制御部およびモータ制御部の異常を検出する異常検出部を備え、前記数値制御部および前記モータ制御部のいずれにおいて異常が発生しても、前記異常検出部からの信号を受けて、減速停止専用モータ制御部に設けられたモータ減速停止制御部によりモータを減速停止させることが可能な異常時モータ減速停止制御機能を有する制御装置を提供すること。
【解決手段】機械50を制御する数値制御装置10は、移動指令を出力する数値制御部11と、数値制御部11からの移動指令に基づいてモータ40を駆動する指令を出力するモータ制御部12とを備え、アンプ20は、モータ制御部12からの指令に基づいてモータ40を駆動するモータ駆動用のアンプであって、異常検出部13は数値制御部11またはモータ制御部12の異常を検出し、モータ減速停止制御部15は異常検出部13からの異常検出信号を受けてモータ40を減速停止させる異常時モータ減速停止制御機能を備えた制御装置。
(もっと読む)
干渉回避制御装置
【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
工作機械
【課題】長期間の放置に伴う主軸の焼き付を含めた破損要因をユーザ側で回避する。
【解決手段】マシニングセンタ1は、装置本体への電源供給をON/OFFする電源スイッチ56と、被加工物を加工する工具を備えた主軸9を回転駆動する主軸モータ74と、電源スイッチ56をOFFしている期間又は主軸モータ74が駆動していない期間の少なくとも何れか一方の期間を放置期間としてカウントするカウンタ55と、放置期間が予め規定した期間を超えているか否かを判定する数値制御装置50と、数値制御装置50が規定期間を超えていると判定した場合にその旨をユーザに報知するディスプレイ82と、を有し、数値制御装置50は、規定期間を超えていると判定した場合に主軸モータ74の駆動を制限する。
(もっと読む)
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
ロボットプログラミング装置および方法
【課題】ロボットの任意の停止状態から所望の動作を実行させる際に工程を選択できるようにプログラミングを行うロボットプログラミング装置等を提供する。
【解決手段】ロボットを使用した組み立てセルのロボットが行う独立した作業を単位とした作業ブロックを実行順に接続して工程フローを作成し、工程フローからロボットプログラムを生成する装置であり、停止ブロック検出手段で検出された停止ブロックと、表示手段に表示した停止ブロックを考慮した外部入力に従って実行ブロック指定手段から得た停止状態から実行する実行ブロックとの位置情報とハンド状態とセンサ状態をそれぞれ比較し、停止ブロックの停止状態を起点として実行ブロックを実行するための一時実行プログラムおよび一時実行作業指示を生成し、表示手段に一時実行作業指示を表示すると共に、入出力手段から一時実行プログラムを出力する工程再構築手段を備えた。
(もっと読む)
衝突監視装置を備えた工作機械
【課題】衝突監視装置を備えた、工作物を機械加工する数値制御工作機械。
【解決手段】衝突監視装置200は、工作機械の機械部品に搭載される衝突センサ210、衝突センサ210に検出される計測値が衝突制限値を超えると工作機械の機械部品の衝突を検知する衝突検知手段220、および衝突検知手段220が衝突を検知すると工作機械の少なくとも1つの加工スピンドルおよび送り軸X,Y,Zを停止する停止信号を出力する信号出力手段230を備える。発明に係る工作機械は工作機械における衝突制限値を決定する装置240を備える。
(もっと読む)
工作機械の制御装置
【課題】指令値やコードを変更したNCプログラムを実行する場合に、安全に且つ加工精度を低下させることなく、ワークを加工可能な工作機械の制御装置を提供する。
【解決手段】工作機械の制御装置1は、NCプログラムを記憶するプログラム記憶部11と、NCプログラムをブロック毎に順次解析して送り機構6に関する動作指令を抽出するプログラム解析部16と、抽出された動作指令を実行して送り機構6を制御する実行制御部21と、NCプログラムを変更するプログラム編集部13と、NCプログラムの変更箇所に関する変更箇所情報を記憶する変更箇所情報記憶部15とを備える。実行制御部21は、動作指令を実行するに当たり、当該動作指令に係るブロックが変更箇所に係るブロックの1つ前のブロックであるか否かを確認して、1つ前のブロックであると判断した場合には、当該動作指令の実行前又は実行後に送り機構6の作動を一時停止させる。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】 ブレーカの容量を低減させつつ、ロボットの遮断動作の頻度を低減させることができ、しかも異常原因の検証を容易に行うことができるロボット制御装置を提供する。
【解決手段】 複数のモータ2jの速度をそれぞれ検出する速度検出器10jと、複数のモータ2jに流れる電流をそれぞれ検出する電流検出器9jと、モータ2jの速度ωjおよびモータ2jに流れる電流Ijからロボットの推定消費電力Pを算出する演算器81と、推定消費電力Pがブレーカ4の電流許容値を基準として異常であるか否かを判定する判定器82と、当該判定において推定消費電力Pが異常であると判定された場合に、ロボットをブレーカ4のトリップを回避するよう制御するための制御器83とを備えている。
(もっと読む)
1 - 20 / 158
[ Back to top ]