
Fターム[3D012BB01]の内容
自動自転車、自転車のフレーム (1,379) | 他に分類されない自転車 (500) | 遊戯用 (129)
Fターム[3D012BB01]の下位に属するFターム
スケートボード型 (31)
Fターム[3D012BB01]に分類される特許
81 - 98 / 98
走行車両
【課題】 乗員搭載部を任意の姿勢に制御する走行車両を提供する。
【解決手段】 車体2と、車体2に回転可能に支持し、一軸上に配置された車輪5と、車体2に支持し乗員Mを搭載する乗員搭載部と、を有する走行車両1において、車体2の姿勢を検出する車体姿勢検出手段121,122と、車体姿勢検出手段121,122の検出した検出値により、車体姿勢を制御する車体姿勢制御手段120と、車体姿勢検出手段121,122の検出した検出値に対応して乗員搭載部3の姿勢を制御する乗員姿勢制御手段130と、を備えることを特徴とする。
(もっと読む)
走行車両

【課題】 乗員搭載部にかかる慣性力又は遠心力に釣り合うように乗員搭載部を移動する走行車両を提供する。
【解決手段】 車体2と、車体2に回転可能に支持し、一軸上に配置された車輪5と、車体2に支持し乗員を搭載する乗員搭載部3と、を有した走行車両において、車体2の姿勢を検出する車体姿勢検出手段と、車体姿勢検出手段の検出した車体姿勢を制御する車体姿勢制御手段と、を備え、乗員搭載部3は、走行車両1の加減速又は旋回動作によって生じる慣性力又は遠心力に対応して、慣性力又は遠心力に釣り合うように移動することを特徴とする。
(もっと読む)
同軸二輪移動台車
【課題】同軸二輪移動台車において、停止時の制動距離を短くすると共に、安定した緊急停止を可能とする。
【解決手段】同軸二輪移動台車は、駆動輪と、操作部と、障害物検知部と、駆動輪を駆動制御する制御部を備え、当該台車の移動中に、ユーザが当該台車の停止を指示した場合には操作部が、障害物の存在が検知された場合には障害物検知部が、制御部に停止指示信号を出力する。制御部は、当該信号に基づき、現在の車速に−1を乗じた値を目標車速に設定すると共に、目標車速に応じた回転数で駆動輪を駆動させる。このため、車体に対して、進行方向と反対の方向に進むように力が加わることになり、停止時の制動距離が短くなる。また、目標車速は、車体が停止するまで逐次0に近づくように変化される。制御部により車体の姿勢が制御されながら目標車速が変化されるため、安定した姿勢での車体の緊急停止が可能となる。
(もっと読む)
走行体
【課題】乗員が乗車する車体を倒立状態に維持しながら走行する走行体について、乗員に不安感を与えずに良好な走行性能を有するように、乗員の個人差を考慮した走行体を提供する。
【解決手段】乗員が乗車して車体を倒立状態に維持した後、初期指令値出力部42がモータ16へ予め設定された波形の初期トルク指令値を出力する。初期トルク指令値によって揺動する車体の傾斜角の応答波形を傾斜角センサ26によって検出する。傾斜角の応答波形は走行体10に乗車した乗員の挙動によって異なる。修正部44は、制御変数(駆動制御部40内の速度リミッタ50のリミット値VL、加速度リミッタ52のリミット値GL、ゲインK)を、傾斜角の応答波形に対応した修正値に修正する。乗員の挙動を含めた車体傾斜角の応答波形に基づいて制御変数を修正するので、各乗員に不安感を与えない範囲でその乗員に適した走行性能を有する走行体が実現できる。
(もっと読む)
走行装置及びその制御方法
【課題】移動路面を含む走行時の制御を良好に行うことができるようにする。
【解決手段】ベース300に独立した車輪301、302が設けられると共に、ジャイロセンサ、3次元加速度センサ及び圧力センサを組込んだセンサモジュール303が装備される。そしてセンサモジュール303の出力に応じてモータ304が制御され、車輪301、302が駆動される。また、ベース300には操作レバー305と、車両本体を牽引するための牽引アーム306が設けられている。そしてベース300には、小型カメラ307を実装して路面の状況を測定し、その状況に応じて本体の姿勢を変化させ、障害物との衝突を回避する。さらにベース300には、補助車輪308と、そのアクチュエータ309が設けられ、減速若しくは停止時に駆動される。さらにベース300には、LED、ブザー等の表示装置310が設けられる。
(もっと読む)
走行装置及びその制御方法
【課題】簡単な手段で、傾斜面での旋回走行時にも安定な車両の制御が行われる。
【解決手段】ロータ角度検出部を有する右車輪駆動モータ17、左車輪駆動モータ18はそれぞれ駆動回路19、20を介して演算装置21に接続される。またバッテリー16からの電力が演算装置21及び駆動回路19、20に供給されると共に、駆動回路19、20への電力供給路には非常停止スイッチ25が設けられる。さらに、演算装置21には搬送装置の姿勢状態(ジャイロによる角速度検出軸ピッチ、ヨー、ロール、加速度センサーによる加速度検出軸X、Y、Z)を検出する姿勢検出センサーユニット22、ハンドル角度検出センサー23、旋回操作レバー24が接続される。そしてこれらの信号から、演算装置21は所定の走行状態を維持するための信号を算出して駆動回路19、20に出力し、右車輪駆動モータ17、左車輪駆動モータ18を介して車輪を駆動する。
(もっと読む)
走行体および走行体の動作調節方法
【課題】 車体の姿勢の安定性を確保しながら、指示に従って正しく移動することができる走行体を具現化する。
【解決手段】 倒立振子型の走行体は、駆動輪の回転角および回転角速度と車体の傾斜角および傾斜角速度の少なくとも4つの状態量に関する指示値を設定する手段と、駆動輪の回転角および回転角速度と車体の傾斜角および傾斜角速度の少なくとも4つの状態量を検出する手段と、指示値と検出値との偏差に所定の係数を乗じた指標を状態量毎に算出し、算出した指標群を合算することによってトルクを計算する手段と、計算されたトルクを駆動輪に加えるアクチュエータと、駆動輪の回転角の偏差に乗じる第1係数と、駆動輪の回転角速度の偏差に乗じる第2係数と、車体の傾斜角の偏差に乗じる第3係数と、車体の傾斜角速度の偏差に乗じる第4係数の少なくとも1つを、検出された車体の傾斜角に応じて増減調整する手段を備えている。
(もっと読む)
走行体
【課題】 駆動に関する異常が発生した場合でも、転倒を回避することができる走行体を提供する。
【解決手段】 走行体10は車体12を倒立状態に維持しながら略同軸上に配置されている一対の駆動輪34、44で走行可能である。走行体の制御モジュール14には車体を倒立状態に維持するためのトルク指令値をモータ32、42に出力する安定化制御器50と、操作レバー18からの入力に従って走行体を走行させるためのトルク指令値をモータ32、42に出力する走行用制御部52を独立して備える。異常検出部58が異常を検出した場合、走行用制御部によるトルク指令値の出力を停止させる。異常検出時にはモータ32、42が出力可能なトルクを全て車体の倒立状態を維持することに使えるので倒立状態を維持する、又は転倒までの時間を引き延ばすことができる。その間に補助輪26を出す。車体が転倒する前に三輪で車体を支持できる。
(もっと読む)
車両
【課題】 姿勢制御を容易、高性能とし、車両を小型化する。
【解決手段】 姿勢制御を行うバランサを、車軸と同軸の回りに回転するフライホイールで構成する。バランサを回転あるいは制動すると、回転数の増減によるバランサに角加速度が生じる。この際にバランサの有する慣性により、バランサの軸の回りにバランサの加速の方向と逆方向に車両を回転させるトルク(反力トルク)が生じる。このトルクにより車両の姿勢制御を行う。車両の姿勢が安定した後は、バランサを自由回転させる。このように、バランサをフライホイールで構成することによりストロークを無限とすることができ、また、バランサの駆動による重心移動が無くなるため、姿勢制御が容易になる。更に、バランサをコンパクト化することができると共に、バランサを重力に逆らわずに保持するためエネルギーの消費を軽減することができる。
(もっと読む)
車両
【課題】 旋回性能を向上して、安定した旋回を行うことができると共に、運転者の負担を軽減して、快適性を確保することができる車両を提供すること。
【解決手段】 旋回時には、左右の車輪12L,12Rの内の旋回内輪が旋回外輪よりも相対的に車体11の上方側へ位置し、旋回内輪側の車高が旋回外輪側の車高よりも低くなるように制御される。これにより、旋回時には、車体11を旋回内輪側へ傾斜させ(即ち、旋回内輪側の車高が旋回外輪側の車高よりも低くなるようにして)、車体11の重心位置を旋回内輪側へ移動させることできるので、その分、より多くの車体重量を旋回内輪に作用させることができる。その結果、遠心力cfに対する対抗力を増加させることができるので、旋回内輪の浮き上がりを防止して、旋回性能の向上を図ることができる。
(もっと読む)
同軸二輪車
【課題】従来の同軸二輪車では、人が立った状態で乗車している立位姿勢のように重心が高い位置にある場合に、旋回走行時の遠心力の作用等により搭乗者の上体が左右に振られて不安定になり、その力が著しく大きくなると車体が横方向に転倒するおそれが生じる。
【解決手段】運転者が搭乗する分割ステップ11L,11Rと、その分割ステップを、走行方向をロール軸としたときのロール軸を中心に回転するロール方向へ姿勢変更可能に支持する車両本体12と、その車両本体の走行方向と直交する方向の両側において同軸上に配置されると共に車両本体に回転可能に支持された一対の車輪13L,13Rと、その一対の車輪を独立して回転駆動する一対の車輪駆動手段14L,14Rと、分割ステップ11L,11Rの姿勢を変化させるハンドル15と、を設けた。
(もっと読む)
車両
【課題】倒立振り子の姿勢制御を利用した車両において、バランサの移動により車両の姿勢を動的に制御する。
【解決手段】 ジャイロセンサで車体の傾斜を検出し、その角加速度から、搭乗部の傾斜に対するトルクT1を算出し、そのトルクを打ち消して傾斜方向と反対の方向に搭乗部を戻すためのトルクT2をバランサの移動により発生させる。すなわち、バランサを搭乗部の傾斜方向にトルクT2(>T1)で駆動することにより、トルクT2に対する反力トルクT3を搭乗部作用させる。この反力トルクT3により、搭乗部は最初に傾斜した方向と反対方向に押し戻される。搭乗部が反対方向に押し戻されることで、鉛直線に対する反対側に搭乗部が傾斜した際の角加速度をジャイロセンサで検出し、その角加速度に対応したトルクT2でバランサを反対方向に再度移動する。
(もっと読む)
車両
【課題】倒立振り子の姿勢制御を利用した車両において、バランサの移動により車両の姿勢を動的に制御する。
【解決手段】 乗員Aの移動トルクT1が所定トルク値以下の場合はバランサBの移動による姿勢制御をする。一方、乗員Aの移動トルクT1が所定トルク値よりも大きくなった場合には、バランサBを所定トルク値に対応する反力を発生させる角加速度で移動し、乗員Aを鉛直線方向に戻すために不足している反力トルク分を駆動輪11のトルクを加減させることで、乗員Aの姿勢を制御する。本実施形態では、所定トルク値としてバランサBの移動により得られる最大トルク値T2maxが使用される。
(もっと読む)
車両装置及びその制御方法
【課題】 車両本体が持ち上げられたときに車輪が不意に回転される事態を防止する。
【解決手段】 本発明による平行2輪車は、車両本体(乗員が立つ部分)1と、車両本体1に同軸上に取り付けられた1対の駆動ユニット2A及び2Bと、乗員がつかまるT字型のハンドル3と、車両本体1の前後(Y軸周り)の傾き検出装置4とからなる。さらに本発明では、ハンドル3の端部に空転制御設定装置5が設けられる。また車両本体1には、図示しないが、車両の制御を行う制御装置と空転制御装置が設けられている。そして運搬モードでは、空転制御設定装置5からの信号によって制御装置に内蔵された空転制御装置が発動される。これによって、空転制御装置からは、例えばトルクを0にする、または速度を0にする、または位置を固定にするような制御トルクが、駆動ユニット2A及び2Bに供給される。
(もっと読む)
3輪型乗用移動台車
【課題】 利用者の意思に沿って操行方向を自由に制御することができ、かつ、静止時に
安定し、バランスを保持するための力をより少なくした3輪乗用移動台車を提供する。
【解決手段】 基台3と、搭乗台4と、基台3と搭乗台4との間の所定の箇所に取り付け
られ基台3と搭乗台4とを連結する弾性体と、一対の前車輪5a,5bと、1輪の後車輪
6と、一対の前車輪5a,5bを独立して駆動するモータと、モータの回転角度を検出す
る回転角度センサと、基台の前後左右方向のバランスを検出する傾斜角センサと、搭乗台
4の基台3に対する前後左右方向の相対角度を検出する搭乗台傾斜検出手段と、各センサ
の信号に基づいてモータの回転を制御する制御手段とを備え、制御手段は、当該利用者の
前後左右方向の重心位置を検出し、その重心位置を示す信号を用いて、前後方向の移動加
速度を制御すると共に、左右方向の操行制御を行う。
(もっと読む)
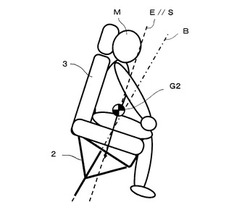
着席者保護装置
【課題】 着席者の身体を保持しない場合には格納位置でアームを格納でき、しかも、この格納状態で座席の着席者に対するアームの干渉を防止又は効果的に抑制できる着席者保護装置を得る。
【解決手段】 着席者保護装置としての本乗員保護装置10では、四節リンク機構92によりアーム100が支持機構32に連結されており、モータアクチュエータ46の駆動力で格納位置と使用位置との間を移動する。格納位置にアーム100が位置した状態では、アーム100の全体又は第2アーム122の先端近傍部分を除いたアーム100の大部分が座席の側壁に形成された開口よりも後方側に位置する。このため、座席14に乗員が着座する際や座席14に着座した状態で乗員が動く際にアーム100が邪魔になることがない。
(もっと読む)
特にスクータ等の移動体
本発明の乗物(特にスクーター)は、互いに離間しベースフレームに対し可動な第1と第2の要素とを有する。これらの要素は、乗物の長手方向に沿って、互いに横に並んで配置されている。前記第1と第2の要素(6,7)が往復運動することにより、動力伝達装置(8)が、この往復運動をスクーターの車輪に加えられる回転運動に変換し、これにより乗物が前進する。本発明による前記第1と第2の要素(6,7)の配置場所と形状により、スクーターの安定且つ効率的な利用が可能となる。  (もっと読む)
(もっと読む)
足推進式車輪付きホビー用具及び/又はスポーツ用具
本発明は、2つのサイドプレート(2、3)間に配置された車輪(1)を有する足駆動式車輪付きホビー用具及び/又はスポーツ用具に関し、サイドプレート(2、3)は車輪(1)の軸(X)に吊り下げられる。フットボード(5)が、車輪(1)の軸(X)の下に配置される。車輪(1)の軸(X)の下に外側に突出して配置されるフットボード(5)がサイドプレート(2、3)に接続される。用具(I、II)の適切な使用時に、サイドプレート(2、3)は、フットボード(5)の一方または両方の上に立っている使用者(12)の膝よりも上に、膝の支持面(a)を備えて、延びている。本発明は、進行方向に関して車輪(1)の後ろの特定の距離(e)のところに、車輪(1)の軌道の範囲内に傾きに対する安定を確保する構造体があり、膝の荷重を軽減するために、サイドプレート(3)は、使用者(12)の腿の支持面(b)を確保する高さ(L)で構築されることに基づく。  (もっと読む)
(もっと読む)
81 - 98 / 98
[ Back to top ]