
Fターム[3D025AG55]の内容
ワイパー、車両の清掃 (12,515) | 駆動制御 (1,100) | ウォッシャー用 (28) | 自動噴射式 (23) | 汚れ検知センサ付(汚れ応動型) (7)
Fターム[3D025AG55]に分類される特許
1 - 7 / 7
車両用クリーナの作動システム
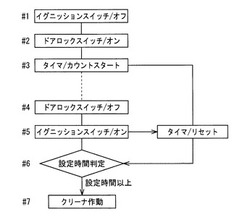
【課題】長期間停車後の運転時にウインドガラスやランプが汚れで視界不良になるのを防止する。
【解決手段】車両に装備されるウインド用クリーナあるいは/およびランプ用クリーナからなる車両用クリーナと、停車時間が設定時間に達しているか否かを検出する停車時間検出手段と、前記停車時間検出手段で検出される停車時間が設定時間に達していると、運転開始時に前記車両用クリーナに自動的に作動させる作動信号を送信する制御手段とを備えていることを特徴とする車両用クリーナの作動システムを提供する。
(もっと読む)
視界情報取得方法、視界情報表現方法、視界情報取得装置、及び視界情報表現装置

【課題】視界の状態を高精度に解析して、しかも客観的に評価することを可能とする視界情報取得方法を提供すること。
【解決手段】視界情報取得方法は、フロントガラス21の背景として異なる明度を含む一定間隔の模様11aを有した背景部材11を配置し、フロントガラス21を一定間隔の模様11aに向かって撮像し撮像画像を得る「撮像工程」と、撮像画像における少なくとも一定間隔を含む部分的な計測範囲内で、一定間隔の模様における少なくとも明るい部分のみの位置に対応した明部位置と暗い部分のみの位置に対応した暗部位置とを含む複数位置の輝度を計測する「輝度計測工程」と、複数位置の輝度を用いて部分的な計測範囲内のコントラストを演算し、該コントラストに基づく値を定量的な視認性悪化度として得る「評価用視界情報演算工程」とを備える。
(もっと読む)
プロジェクタ型ヘッドランプの汚れ検出装置
【課題】車両のデザイン性を損なうことなくレンズ面の汚れを高精度に検出することができるプロジェクタ型ヘッドランプの汚れ検出装置を提供すること。
【解決手段】ハウジングとその前面開口部を覆うアウタレンズ2によって画成される灯室3内に光源4、リフレクタ5、シャッタ6及びプロジェクタレンズ7を収容して成るプロジェクタ型ヘッドランプ1の前記アウタレンズ2の汚れを検出する汚れ検出装置10を、前記シャッタ6に配置された受光フォトダイオード(受光センサ)11と、該受光フォトダイオード11からの検出信号に基づいて前記アウタレンズ2の汚れを判定するコントローラ(ECU)13を含んで構成する。又、前記コントローラ(ECU)13は、前記アウタレンズ2の汚れを検出すると該アウタレンズ2を洗浄する洗浄装置20の駆動信号を出力する。
(もっと読む)
ヘッドランプモジュール
【課題】泥はねや雨などに性能が影響されないヘッドランプモジュールを提供することにある。
【解決手段】複数のLEDランプ21,…,30にうち、LEDランプ30は、発光波長の異なる異物検出用LEDランプである。CPU16は、異物検出用LEDランプをオンしたときのカメラユニット1により撮像された画像データの平均輝度と、異物検出用LEDランプをオフしたときのカメラユニット1により撮像された画像データの平均輝度との差が所定値以上のとき、ランプカバーに異物が付着したと判定する。撮像された画像データから円形データが検出された場合には、異物は雨滴であるとして、円形データが検出されない場合には、異物は汚れであるとする。
(もっと読む)
車両におけるドアガラス清掃装置
【課題】ドアガラスの外面及び内面を清掃できる車両におけるドアガラス清掃装置の提供を課題とする。
【解決手段】ドアガラス10に車外側と車内側から圧接する一対の圧接部材30と、圧接部材30をドアガラス10の外面及び内面に対して圧接・離隔させる接離機構28と、を有するドアガラス清掃装置20とする。
(もっと読む)
汚れ検出装置及び洗浄装置
【課題】車両に搭載された太陽電池システムの受光面における汚れを簡易な方法で検出する汚れ検出装置及びこれを備える洗浄装置を提供すること。
【解決手段】車両に搭載された太陽電池システム20の受光面21における汚れを検出する汚れ検出装置30であって、車両の車速を検出する車速検出手段34と、太陽電池システム20の受光面21における汚れによって生じ得る所定事象を検出する所定事象検出手段と、を備え、車速検出手段34により検出された車速と、所定事象検出手段により検出された所定事象の経時変化と、に基づいて太陽電池システム20の受光面21における汚れを検出することを特徴とする。
(もっと読む)
車両の窓ガラスの異物除去装置
【課題】 車両が停車状態であるときに、車両の窓ガラスに付着した異物を除去することができる車両の窓ガラスの異物除去装置を提供する。
【解決手段】 IGスイッチ検出センサ2からの検出信号に基づいて、マイコン10が停車状態であると判断し、かつ撮像部3および撮像画像処理部4ならびに温度センサ5および温度画像処理部6によって得られる撮像画像データおよび温度画像データに基づいて異物を検出し、異物の大きさがしきい値以上であり、異物が除去する必要である位置にあれば、マイコン10がワイパ制御部12を制御し、ノズル部駆動モータ14を駆動させてノズル部24を異物の位置に向けて、ウォッシャ液噴出ポンプによってウォッシャ液を噴出させて、ワイパ駆動モータ15を駆動してフロントガラス22を払拭させる。これによって、車両が停車状態であっても、車両の窓ガラスに付着した異物を除去することができる。
(もっと読む)
1 - 7 / 7
[ Back to top ]