
Fターム[3D034BC24]の内容
操向リンク系及び4WS (6,986) | 操舵リンク機構 (1,407) | 操舵リンク構成アーム (520) | センターアーム、アイドラアーム (11)
Fターム[3D034BC24]に分類される特許
1 - 11 / 11
農業用トラクタ
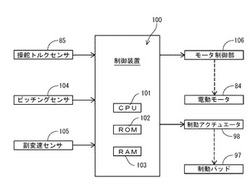
【課題】農業用トラクタにおいて、操舵トルクセンサが故障しても確実に操舵力補助制御を継続できるようにする。
【解決手段】農業用トラクタは、エンジンが搭載され且つ前後四輪にて支持された走行機体と、走行機体に設けられた操縦ハンドルと、電動モータ84を有する電動操舵機構と、操縦ハンドルの操舵トルクを検出する操舵トルクセンサ85とを備える。操舵トルクセンサ85の検出結果に基づき電動モータ84の出力を増減させ、電動操舵機構を介して左右両前車輪を操舵する。走行機体の前後方向の傾斜角を検出するピッチングセンサ104を備える。ピッチングセンサ104の検出結果に基づき電動モータ84の出力を調節可能に構成する。
(もっと読む)
ベルクランクアーム構造

【課題】
ベルクランクの回転軸を支える車両側への取付ブラケットに発生する応力を低減して、ステアリングのリンク機構の剛性を高めて、操作性、耐久性の向上を図ったステアリング装置を提供することを目的とする。
【解決手段】
車両のステアリングのリンク機構2中間部に配設されるベルクランク3機構において、上下方向に配置されたアームシャフト33と、一端がアームシャフト33の上端部に固着され、他端が下方へ変位して車両の前後方向に揺動するドラッグリンク4に枢着した入力側クランクアーム31と、一端がアームシャフト33の下端部に固着され、他端が上方へ変位して車両の左右方向に揺動するリレーロッド51に枢着した出力側クランクアーム32とを備え、上下方向において、入力側クランクアーム31と出力側クランクアーム32の夫々の他端間隔を前記アームシャフト33の長さより短くしたベルクランクアーム構造。
(もっと読む)
作業機の操向角検出構造
【課題】単一センサで操向角度センサを構成できる良さを生かしながら、操向角度センサの取付位置を合理的に設定して、故障等を未然に回避して信頼性の高い作業機の操向角検出構造を提供する。
【解決手段】前輪の操向角度を検出する操向角度センサ47と繰向部材41とを連係機構Bによって連係する。連係機構Bを、繰向部材41より後方に延出された連係ロッド48と、その連係ロッド48の作動を伝達する上下向き姿勢の回転連係軸49とで構成し、操向角度センサ47を前記回転連係軸49の上端部に連係させてある。
(もっと読む)
車両用操舵装置
【課題】車両直進状態からの操舵時、操舵ロッドを車幅方向に所定量移動させることにより、所謂、キングピン軸を車両外側に設定量移動させ、車輪の最大転舵角を大きくする。
【解決手段】操舵ロッド21とナックル22を連結する連結リンク機構30は、タイロッド31とコントロールリンク(リンク)32とコントロールロッド33で構成されている。タイロッド31は、ナックルアーム22aと操舵ロッドの端部21bに結合されている。リンク32は、中間部32aでサスペンションロアアーム61に回動可能に結合され両端部でナックル22とコントロールロッド33に結合されている。コントロールロッド33は、リンク32の車両外端部32cと操舵ロッドの端部21cに結合されている。車両直進状態で、リンク32は、車幅方向に延在し、ナックル22との結合部BJ3が、サスペンションロアアーム61との結合部PJ1に対し、最も車両内側に配置されている。
(もっと読む)
車両ガード装置
【課題】一般的な車両や自動運転車両に広く適用が可能な車両ガード装置を提供する。
【解決手段】前輪2L,2Rより前方に配備される第1フロントガード輪11L,11Rと、前記第1フロントガード輪の横変位力をステアリング力として伝達する第1伝達手段7、8,10,20と、前記第1フロントガード輪より車両前後方向における後方側で、前輪より前方側に配備される第2フロントガード輪23L,23Rと、前記第2フロントガード輪の横変位力をステアリング力として伝達する第2伝達手段21L,21Rとを備える車両ガード装置GDであって、前記第1フロントガード輪が前記第2フロントガード輪よりも車両1の左右方向における中心側に設置してある、タイプが異なる2系統のフロントガード輪を備えることにより異なる衝突形態に広範囲に対処できる。
(もっと読む)
伸縮アクチュエータ
【課題】 送りねじ機構を用いた伸縮アクチュエータが外力により伸縮するのを機械的に規制する。
【解決手段】 相互に螺合する雄ねじ部材95および雌ねじ部材96をモータ36で相対回転させると、雄ねじ部材95および雌ねじ部材96の軸方向の相対変位をスラスト力として出力することができる。振動的な外力や大きな外力が入力すると雄ねじ部材95および雌ねじ部材96がスリップにより相対回転して伸縮アクチュエータ14が意図せぬ伸縮を行う可能性があるが、コイルばね101で雄ねじ部材95および雌ねじ部材96の一方を他方に向けて軸方向に付勢することで、雄ねじ部材95および雌ねじ部材96間に摩擦力を発生させて相対回転を抑制し、前記意図せぬ伸縮の発生の防止することができる。
(もっと読む)
全車輪の車軸方向を完全に集中させる操舵装置
【課題】本発明は四輪車等の全車輪の旋回中心を完全に一点に集中させて、車輪をリンク駆動により操向させ、しかも回転半径をゼロ又はゼロ近くとする操舵装置の実用化。
【解決手段】(イ)車輪を操向させる左右のロッド7,6を軸(制御軸12)により結合しV状に屈折自在とする。
(ロ)左右のロッド7,6の長さを調節して、全車輪の旋回中心を完全に一点に集中させて動かしたときの、軸(制御軸12)の移動軌跡より制御しやすい形を選択し、それに合致した逆V状のカム溝21を設ける。
(ハ)そのカム溝21内に嵌合した上記の軸(制御軸12)をレバーなどで両方向に移動させ、左右のロッド7,6により両車輪を操向し操舵する。
以上のように構成してどの操舵位置でも全車輪の旋回中心を一致させる。
(もっと読む)
油圧式車軸駆動装置
【課題】従来の、油圧駆動による車軸駆動装置を備える四輪駆動の作業車両において、左右前輪を略水平回動する車輪支持ユニット間を、一本のタイロッドで連動連結するステアリングリンク機構が知られているが、車軸駆動装置に沿って設けたタイロッドを避けるために車軸駆動装置間に圧油や動力を伝達する伝達部材の構造が複雑化し、製造コストが上昇したりメンテナンス性等が低下した。
【解決手段】各車輪支持ユニット86には、車軸5aを支持すると共に略水平に旋回する各操舵ケース103を設け、該各操舵ケース103からは各操舵アーム157を立設し、該各操舵アーム157は連結ロッド158を介して共通の回動部材のセクタギア155と連動連結し、該セクタギア155を有するステアリング操作機構150を操作することによって前記各前輪5を操舵すると共に、前記セクタギア155は、前記前車軸駆動装置10の後方に離間して配置した。
(もっと読む)
スイングジョイントを有する柔軟なリアアクスル及び対応する自動車
本発明は、縦方向のアーム(12)とクロスビーム(24)を有し、クロスビーム(24)を横切って伸び、クロスビーム(24)の中央部へ連結された、スイングジョイント(26)を形成するアームと、スイングジョイントの車両の前部へ向けられた前端部(30)を、縦方向のアームの車体への連節部に近接して上記アームへ、または縦方向のアームの車体への連節部の高さで車体(20)へ連結し、クロスビーム(24)に概ね平行な連結部材(42、50)と、車両の後部へ向けられたスイングジョイントの後端部(32)を、それぞれ車輪の支持(16)へ連結する2つの連接棒(34)とからなる、自動車用の柔軟なリアアクスルに関する。 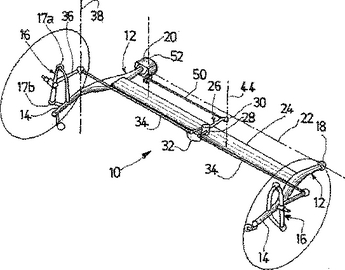 (もっと読む)
(もっと読む)
産業車両用シリンダカバー及び産業車両
【課題】産業車両の駆動用シリンダのシリンダロッドを保護しながらも配置スペースを狭小化する。
【解決手段】シリンダカバー30は、フォークリフトの相対移動するステアリングナックル10のロッド連結側ナックルアーム11bと車体のリヤアクスルビーム24との間に架設されたステアリングシリンダ8のシリンダロッド14を保護する。ステアリングナックル10のロッド連結側ナックルアーム11bと車体のリヤアクスルビーム24との間に、幕状をなしかつステアリングシリンダ8の伸縮方向に関して伸縮変形可能な弾性を有するカバー部材32が、ステアリングシリンダ8のシリンダロッド14の伸縮動作に応じて伸縮変形可能に張設される。
(もっと読む)
ステアリングホイールのためのステアリング装置
車両(2)のホイール(1)を操縦するためのステアリング装置であって、前記ホイール(1)を支持するために配置される支持手段(4)、それぞれの長手方向の軸手段(Z)の周りに前記支持手段(4)を回転させるために配置される駆動手段(27)、および、前記支持手段(4)と前記駆動手段(27)とを連結するために配置される接続手段からなるステアリング装置において、前記連結手段は、伝動装置手段(26)からなるステアリング装置。
前記操縦されたホイール手段(1)を制御するために配置された操縦されたホイール手段(1)およびステアリング手段(3)からなる車両であって、前記ステアリング手段(3)は、前記操縦されたホイール手段(1)を支持するために配置される支持手段(4)、それぞれの長手方向の軸手段(Z)の周りを前記支持手段(4)が回転するように配置される駆動手段(27)、および前記支持手段(4)と前記駆動手段(27)とを連結するために配置される接続手段を備えた車両において、前記連結手段は伝動装置手段(26)からなる車両。
 (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]