
Fターム[3D034CD05]の内容
操向リンク系及び4WS (6,986) | 4WSの検出(入力信号) (1,597) | 車両の運動状況 (761) | 加速、減速 (73)
Fターム[3D034CD05]に分類される特許
1 - 20 / 73
加加速度情報を用いた車両の運動制御装置および方法
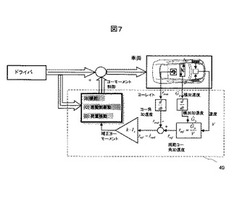
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
操舵制御装置

【課題】操舵制御装置において、車両挙動の安定化させつつ、車両の前後輪の操舵をより適切に制御することを可能とする。
【解決手段】操舵制御装置100は、所定の走行軌跡を走行するように操舵輪の舵角を変更可能な操舵機構200を備えた車両10の操舵制御装置であって、車両を所定の走行軌跡に追従させるための操舵輪の目標舵角を特定する特定手段240と、特定された目標舵角を、前記車両の加速度に基づいて補正する第1の補正手段100と、操舵輪の舵角が前記補正された目標舵角になるように前記操舵機構を制御する制御手段100とを備える。
(もっと読む)
車両の後輪操舵制御装置
【課題】 旋回走行時の加減速に起因する旋回特性の変化を適切に抑制することができる車両の後輪操舵制御装置を提供する。
【解決手段】 自動車100の後輪3rl,3rrを転舵する後輪操舵アクチュエータ8l,8rを備えた車両の後輪操舵制御装置5であって、少なくとも前輪舵角δf(目標前輪舵角δft)、車速Vおよび前後加速度Gxを含む車両の運動状態量を検出する運動状態量検出手段(操舵角センサ12,車速センサ21,前後加速度センサ22)と、少なくとも前輪舵角δfおよび車速Vから、車両モデルに基づいて目標旋回挙動を設定し、当該目標旋回挙動に基づいて目標後輪舵角δrを設定する目標後輪舵角設定部32とを有し、前記車両モデルは、車両のスタビリティファクタAに基づいて設定され、スタビリティファクタAは、車速Vおよび前後加速度Gxに基づいて補正されることを特徴とする。
(もっと読む)
車両制御装置
【課題】四輪操舵装置を備える車両を、操舵時に進行方向に対して好適に平行移動させる。
【解決手段】車両10は、前輪を操舵可能な前輪側操舵機構250,260と、操舵される前輪の舵角に対し、走行状態に応じて異なる舵角をとるように後輪を操舵可能な後輪側操舵機構270,280とを有する。この車両を制御する車両制御装置100は、予め設定された車両のヨー角を特定するための第1関数から、ヨー角を零とした場合における前輪の舵角と後輪の舵角との関係を表す第2関数に含まれる時定数τ1,τ2の値を、決定する時定数決定手段と、決定された値を時定数に代入した第2関数を用い、ヨー角を零とした場合における、操舵される前輪の舵角σfに対し後輪がとるべき舵角たる後輪目標舵角σrを決定する目標舵角決定手段とを備える。
(もっと読む)
車輪位置変更装置
【課題】 路面段差通過時など大きな入力があった場合でもその衝撃を吸収しながら車両挙動をより安定にすることができる車輪位置変更装置を提供する。
【解決手段】 車輪位置変更装置は、車輪を懸架する複数の懸架手段と、各懸架手段に設けて車体に対する車輪の向きを変更する車輪向き変更手段と、各懸架手段に設けた車輪を駆動する駆動手段と、懸架手段を車体に対して目標位置に移動させる車輪位置変更手段と、を備え、車輪位置変更手段が、懸架手段を目標位置に向かわせる復元力を目標位置から第1の閾値分離れた範囲内では小さく、この範囲外では大きくなるように制御する。
(もっと読む)
加加速度情報を用いた車両の運動制御方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモ
ーメント量を調整すること。
【解決手段】入力された横方向の加加速度(Gy_dot)を、入力された車両の前後方向の速度(V)で除した値(Gy_dot/V)に対して、さらに入力された車両の横加速度(Gy)で除した値に比例した物理量に基づいて、車両の前後加速度の制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。また、上記の車両の横方向の加加速度(Gy_dot)は、入力された横加速度を(Gy)をもとに求めること。また、入力された車両の横方向の加加速度(Gy_dot)に、速度(V)及び横加速度(Gy)から決定され、予め記憶されたゲイン(KGyV)を乗じ、乗じた値に基づいて、車両の前後加速度を制御する制御指令を生成し、生成された前記制御指令を出力する車両の運動制御方法。
(もっと読む)
操舵制御車両
【課題】操舵制御手段が制御不能となった場合に車両挙動をより安定化させる。
【解決手段】自動車Vは、左右後輪3rに設けられた後輪トー角可変機構6と、左右前輪3fと左右後輪3rに設けられた減衰力可変ダンパ4およびスタビライザ8とを有する。ECU20は、故障検出部34によって左右両方の後輪トー角可変機構6に故障が検出された場合(ステップS5:Yes)、前輪3のダンパ4rの目標減衰力を大きく補正するとともに(ステップS6)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。また、ECU20は、故障検出部34によって左右どちらかの後輪トー角可変機構6に故障が検出された場合(ステップS5:No)、故障した側の後輪3rの目標減衰力を小さく設定するとともに(ステップS11,S13)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態の速やかな解消を補助できる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態にある場合には、前輪の車輪速度VWFを調整すべくアクセル操作を運転手が行うことを契機にグリップ力回復制御が実行される。すなわち、転舵輪である前輪は、その車輪速度VWFが運転手によって調整されつつ、その転舵角σの絶対値が一時的に小さくなるように調整される(第3タイミングt3)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第4タイミングt4)。
(もっと読む)
4輪操舵機構を搭載した車両の操舵制御装置
【課題】4WS車両に於いて、前後輪が同相にて操舵される条件で、緊急回避時など車両の横方向に大きく移動をさせたいときに、その方向に十分に移動できるように後輪操舵制御が修正された操舵制御装置を提供すること。
【解決手段】本発明の車両の4輪操舵制御装置は、車両の走行条件に基づいて後輪を前輪に対して同相又は逆相にて操舵するよう後輪舵角を制御する後輪操舵制御部と、車両をその横方向に移動させるべき状態を検出し横方向の目標移動距離を決定する目標移動距離決定部とを含み、車両を横方向に移動させるべき状態を検出したときには、目標移動距離に基づいて決定される期間、後輪が前輪に対して逆相に操舵され、後輪の同相にての操舵を遅らせることを特徴とする。
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が、滑り易い道路を発進する場合を想定し、運転者の操舵操作を補助して車両姿勢の立直しを確実に図ることを可能とした車両停止保持装置を提案する。
【解決手段】ブレーキペダルの踏込の操作後、当該踏込操作が解除されたときに車輪の制動力を保持可能とする制動力保持手段を有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段と、前記車両の操舵角を検出する操舵角検出手段を含み、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応じて車両のヨー挙動を制御するヨー挙動制御手段とを備える。運転者によるステアリング操作を積極的にアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに対して有効に対処しながら車両姿勢を修正できる。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置21を備え、後輪5のトー角θRTCが可変制御される後輪トー角可変式の自動車Vに設けられ、後輪5のトー角θRTCの制御に供される後輪トー角制御装置11において、ヨーレートγを検出するヨーレートセンサ9と、横加速度αyを検出する横加速度センサ10とを備え、検出されたヨーレートγと横加速度αyとに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角θRTCをトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角θRTCをトーアウト側に設定する。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、適切に障害物を回避することを可能とする。
【解決手段】車両の制御装置は、運転者が車両を実際に操舵した実操舵量を取得する取得手段(100等)と、取得された実操舵量に応じた操舵力を前記車両の少なくとも前車輪に付与する付与手段(17)と、車両の進行方向における障害物を検知する検知手段(21)と、検知された障害物と前記車両とが衝突する衝突時間を算出する算出手段(100)と、算出された衝突時間に基づいて、障害物を回避するために目標となる目標操舵量の所定範囲を特定する特定手段(100)と、取得された実操舵量が所定範囲内にある場合、操舵力を付与するように付与手段を制御し、取得された実操舵量が所定範囲内にない場合、操舵力に加えて障害物の回避を補助するための補助操舵力を付与するように前記付与手段を制御する制御手段(100)とを備える。
(もっと読む)
後輪操舵制御装置
【課題】 起動時等に故障誤検知をしたり、違和感を伴なう動作を行うことのないように改良された後輪操舵制御装置を提供する。
【解決手段】 アクチュエータの温度が所定値以下のときには、前記アクチュエータの駆動状態を抑制することにより、左右後輪のアクチュエータの応答に差異が生じたり、遅れが生じるのを防止し、しかも誤った故障診断を行うことを回避することができる。
(もっと読む)
後輪トー角可変車両
【課題】後輪駆動の後輪トー角可変車両車両における旋回時の限界加速性能を高めることを目的とする。
【解決手段】左右後輪3Rl,3Rrが駆動輪であり、且つ左右後輪3Rl,3Rrのトー角を個別に変化させることのできる後輪トー角可変自動車Vにおいて、横加速度センサ31から左右後輪の接地荷重を推定し、後輪駆動力推定部22において筒内圧センサ32やギヤ比等から後輪3Rの駆動力Fxを推定し、目標トー角設定部23が、横加速度センサ31から推定した後輪接地荷重(摩擦円FCl,FCr)と、後輪駆動力推定部22によって推定された後輪駆動力Fxとに基づいて旋回駆動走行状態と判定した場合、左右後輪3Rl,3Rrの目標トー角θl,θrをトーイン側に設定するとともに、内輪側の目標トー角θrが外輪側の目標トー角θlよりも大きくなるようにようにする。
(もっと読む)
車両運動制御装置
【課題】左右転舵時の走行性の走行感度向上と安定性向上を図る上で、より制御精度の高い車両運動制御装置を提供する。
【解決手段】前輪舵角が制御可能な前輪転舵装置4と、後輪トー角が制御可能な後輪トー角変更装置6L,6Rとを有する車両において、前輪舵角と後輪トー角とを協調制御する車両運動制御装置1Aであり、少なくとも操舵ハンドル角θh及びヨーレートγの信号を受け、擬似ヨーモーメントコマンドを算出し出力する制御部3と、擬似ヨーモーメントコマンドに対して擬似逆行列を用いて前輪転舵角と後輪トー角に分配する分配演算部5Aと、各車輪の車輪荷重に応じた前記擬似逆行列の重みを算出して取得する重み係数演算部5aと、を備えている。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】車両の状態量、運転者の操作量を示すセンサ信号を取り込むセンサコントローラ2と、前記センサ信号に基づいて制御目標値を生成する指令コントローラと、制御目標値を受けて車両を制御するためのアクチュエータ5を作動させるアクチュエータコントローラ3と、がネットワークで接続される車両制御装置であって、前記アクチュエータコントローラ3は、前記指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラ3が受信したネットワーク上のセンサ値に基づいて制御目標値を生成する制御目標値生成手段を有し、前記制御目標値によってアクチュエータ5を制御する。
(もっと読む)
トウ・キャンバー角調整装置
【課題】高グリップ性と低燃費との両立を図ることができると共に、キャンバー角が制御不能となった場合に車両を安定した状態で制動することが可能なトウ・キャンバー角調整装置を提供する。
【解決手段】車輪のトウ角及びキャンバー角を制御するトウ・キャンバー角調整装置において、前記車輪は、第1トレッドと、その第1トレッドに対して幅方向に並設され車両の外側に配置される第2トレッドと、を備えると共に、第1トレッドと第2トレッドとが互いに異なる特性に構成され、第1トレッドは、第2トレッドに比して、グリップ力の高い特性に構成されると共に、第2トレッドは、第1トレッドに比して、転がり抵抗の小さい特性に構成され、車輪のキャンバー角が制御不能か否かを判別する判別手段を有し、判別手段が車輪のキャンバー角が制御不能であると判別した場合、少なくとも制動時に車輪をトウアウトに制御することを特徴とする。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができると共に、キャンバー角が制御不能となった場合に車両を安定した状態で制動することが可能な車両制御装置を提供する。
【解決手段】第1トレッドと、その第1トレッドに対して幅方向に並設され車両1の外側又は内側に配置される第2トレッドと、を備え、第1トレッドは、第2トレッドに比して、グリップ力の高い特性に構成されると共に、第2トレッドは、第1トレッドに比して、転がり抵抗の小さい特性に構成された車輪2と、車輪2のキャンバー角を調整するキャンバー角調整装置4とを備えた車両用制御装置100において、少なくとも一つの車輪2のキャンバー角が制御不能であると判断した場合、制御可能な車輪2のキャンバー角を制御不能な車輪2のキャンバー角に近づけるように制御すると共に、ステアリング機構54を制御することを特徴とする。
(もっと読む)
車両の走行姿勢制御装置及び走行姿勢制御方法
【課題】精度よく所望のヨーモーメントが得られる車両の走行姿勢制御装置及び方法を提供する。
【解決手段】ドライバによるステアリングホイール操舵とは独立して転舵可能な車輪を有する車両の姿勢を制御する装置であって、運転状態に応じて駆動輪の駆動力を設定する手段(S6)と、設定された駆動力が実現可能な範囲内にあるか否かを判定し、実現可能な範囲を超えるときは駆動力を実現可能な駆動力に制限する手段(S8,S12)と、駆動力制限によって生じる車体の横力変化及びモーメント変化を抑制するような各車輪の舵角補正量の組み合わせを算出する手段(S11)と、を有し、各輪の横滑り角変化量がタイヤ横力変化量に影響する度合を表す指標であるタイヤ横力感度に基づいて、舵角補正量の組み合わせを算出する。
(もっと読む)
4輪操舵機構を搭載した車両の操舵制御装置
【課題】前進時は4WSで、後退時は2WSで操縦される車両に於いて、車両の後退時と前進時の軌道が異なることに起因して車両の軌道の把握・予測がし難くなることと、車両が周囲の障害物に接触する可能性が高くなることを回避できるようにすること。
【解決手段】本発明の車両の4輪操舵制御装置は、車両が進行方向を検出する走行方向検出部と、車両が後退していることを記憶する記憶部とを含み、車両の後退が検出されたときには後輪の舵角が0になるよう後輪操舵装置を制御し、記憶手段により車両の後退が記憶されているときに車両の前進が検出されたときには所定の条件が成立するまで後輪の舵角が0に維持されるよう後輪操舵装置を制御することを特徴とする。
(もっと読む)
1 - 20 / 73
[ Back to top ]