
Fターム[3D034CD11]の内容
操向リンク系及び4WS (6,986) | 4WSの検出(入力信号) (1,597) | 操舵の状況 (555)
Fターム[3D034CD11]の下位に属するFターム
操舵角、操舵方向、操舵比、位相等 (447)
操舵速度 (31)
操舵力 (66)
Fターム[3D034CD11]に分類される特許
1 - 11 / 11
電気自動車の車体構造
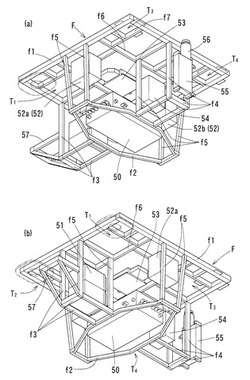
【課題】インバータのメンテナンスを容易にする。
【解決手段】車両のフレームFの床面よりも上に座席Sを備えるようにし、走行用モータ34に電力を供給するバッテリ51と、前記走行用モータ34用に電力を変換するインバータ50とを、車両のフレームFの床面よりも下に収納するようにした電気自動車の車体構造において、前記バッテリ51を前記座席Sよりも前方に、前記インバータ50を前記座席の直下に配置する電動自動車の車体構造とした。バッテリを座席よりも前方に、インバータを座席の直下に配置したことにより、座席を取り外すことで、インバータが床面を通じて上方に露出させることができ、インバータのメンテナンスを容易にすることができる。
(もっと読む)
車両操舵装置

【課題】ステアバイワイヤ装置のフェール時に十分な車両の運動を確保するための車両操舵装置を提供する。
【解決手段】ステアバイワイヤ装置12により転舵する第1の車輪2と、運転者のための操作部材5との機械的連結により転舵する第2の車輪3と、を備える車両1のための車両操舵装置10は、操作部材5への入力により回転可能に操作部材5に連結されている回転軸32と、回転軸32の回転可能範囲を制限するための回転角抑制機構34と、を備える。回転角抑制機構34は、ステアバイワイヤ装置12のフェール時に回転可能範囲を超える回転を回転軸32に許容するよう構成されている。
(もっと読む)
操舵装置
【課題】左右車輪のトー角を調節するとともに、左右車輪を操舵する操舵装置を提供する。
【解決手段】車両の左右車輪(後輪)2a、2bを操舵する操舵装置1であって、車体に取り付けられる操舵ハウジング50と、この操舵ハウジング50に収容され左右車輪2a、2bに連携する操舵ロッド10と、操舵ハウジング50に対して操舵ロッド10を左右方向に移動する操舵機構9と、操舵ロッド10の長さを左右方向について変えるトー角調整機構14とを備える。
(もっと読む)
操舵装置
【課題】複雑で高価な機構や制御を用いることなく、簡単な構造で確実に二輪操舵と四輪操舵を切り替えることのできる操舵装置を提供する。
【解決手段】前輪操舵機構52が連結された操作部51に対して、後輪操舵機構53を連結することにより四輪操舵とし、後輪操舵機構53の連結を解除することにより二輪操舵とする操舵切り替え機構54を備えたので、複雑な機構や制御を必要とすることなく、簡単な構造で確実に二輪操舵と四輪操舵を切り替えることができる。
(もっと読む)
後輪トー角可変車両
【課題】後輪トー角可変車両において、左右の後輪トー角可変制御装置の一方が故障した場合の操縦安定性の悪化を抑制する。
【解決手段】左右後輪5L,5Rに対してそれぞれ設けられ、後輪5のトー角を可変制御する後輪トー角可変制御装置10L,10Rを備えた自動車Vにおいて、左右後輪5に対してそれぞれ設けられ、対応する後輪5のトー角θを検出するストロークセンサ16L,16Rと、許容できる車速の上限値を最高車速Vmaxとして設定する最高車速設定部53を備え、最高車速設定部53は、少なくとも一方の後輪5がトーアウト状態で制御不能となった場合、後輪5のトーアウト量が大きいほど最高車速Vmaxを低く設定し、ストロークセンサ16が故障した場合、最高車速Vmaxを最大トーアウト量に対応する最高車速Vmaxと同一の値に設定するように構成する。
(もっと読む)
伸縮アクチュエータ
【課題】 トーコントロールアクチュエータの第1、第2ハウジングからそれぞれ延びる第1、第2ハーネスの擦れに対する耐久性を高める。
【解決手段】 車輪を転舵するトーコントロールアクチュエータ14の第1、第2ハウジング31,32からそれぞれ延びる第1、第2ハーネス111,114のうち、一方のハーネス111のターミナル112に他方のハーネス114をホルダ116を用いて固定することで両ハーネス111,114を1本に束ねるので、両ハーネス111,114の取り回しをすっきりさせることができる。これにより、トーコントロールアクチュエータ14の作動に伴って両ハーネス111,114が振れても、それらが相互に擦れ合ったり、他部材と擦れ合うのを防止して耐久性を高めることができる。
(もっと読む)
ステアリング装置、自動車、及びステアリング制御方法
【課題】通常の2輪操舵に近い操作性を確保しつつ、路肩への幅寄せを容易にする。
【解決手段】ステアリング操作に応じて前輪だけの転舵を開始して前輪舵角δfが飽和したら前輪舵角δfと逆方向に後輪の転舵を開始する駆動モードAと、ステアリング操作に応じて後輪だけの転舵を開始して後輪舵角δrが飽和したら後輪舵角δrと逆方向に前輪の転舵を開始する駆動モードBとを、極低速走行時に、何れか一方から他方へと切り替えて実行する。
(もっと読む)
車輌の制御装置
【課題】車輌の挙動の急変を回避しつつ制御量が異常な値になった場合に異常な制御量に基づいて不適切な制御が長く継続されることを防止する。
【解決手段】転舵角可変装置24により左右前輪の舵角を適正に制御することができない異常が生じたときには(S220)、目標転舵角Δδtの大きさが各サイクル毎に漸次減少するよう目標転舵角Δδtが漸減処理され(S270)、目標転舵角Δδtが異常な値であるときには(S240)、推定目標転舵角Δδthの大きさが各サイクル毎に漸次減少するよう推定目標転舵角Δδthが漸減処理され(S250)、推定目標転舵角Δδthが目標転舵角Δδtに設定され(S260)、推定目標転舵角Δδthの漸減の速さは目標転舵角Δδtの漸減の速さよりも高く、推定目標転舵角Δδthは目標転舵角Δδtよりも速やかに漸減される。
(もっと読む)
車両用操作装置
【課題】操作装置を通常走行モードと特殊走行モードとで共用でき、なおかつ操作装置のポジションによってモードの違いが判別できる車両用操作装置を提供する。
【解決手段】本発明は、独立して操舵可能な複数の車輪を有し、該複数の車輪の操舵角度を操舵するステアリングを備える車両用操作装置であり、複数の車輪のうち前輪のみを操舵する通常走行モードと、複数の車輪の全てを操舵する特殊走行モードとがあり、ステアリングの位置を変更するステアリング位置変更手段(3、5、6、8、9、10)を有する。通常走行モードと特殊走行モードとのモード変更は、ステアリング位置変更手段によるステアリングの位置に応じて行う。
(もっと読む)
車両盗難防止装置
【課題】ユーザの操作を煩雑にすることなく車両の盗難を正確に検出することを可能にする車両盗難防止装置を提供すること。
【解決手段】本発明に係る車両盗難防止装置1は、車両の水平面に対する傾斜角を検出する傾斜角検出手段2を備え、傾斜角検出手段2により検出された傾斜角に基づいて車両の盗難の有無を判断するものであって、パワーステアリング装置3と、パワーステアリング装置3を制御する制御手段5とを備えるとともに、傾斜角検出手段2の検出した傾斜角が所定角度以上である場合に制御手段5がパワーステアリング装置3にアシスト力を発生させることを特徴とする。
(もっと読む)
4輪独立操舵車両の操舵制御方法
【課題】 操舵モードを変えて走行制御する4輪独立操舵車両において、走行中に車両を一旦停止させることなく操舵モードを円滑に変え、また操舵モードの遷移過程において、左右の車輪の開閉脚現象が生じないようにする。
【解決手段】 各々独立操舵制御される右前車輪P1,左前車輪P2,右後車輪P3,左後車輪P4に対する中心点Oを通るX座標軸ならびにY座標軸からの車輪P1,P2,P3,P4の距離をそれぞれL,Wとし、車両を旋回させるに要する各車輪P1,P2,P3,P4に関する同一共通旋回中心点CのX・Y座標を(R,m)を操舵指令値R,mとし、操舵指令値m又は/及びRを変更し且つその操舵指令値の遷移過程の総ての時間断面で操舵指令値を徐々に変化させながら、各車輪P1,P2,P3,P4の各操舵角度α1,α2,α3,α4を、次の操舵拘束条件式に従って演算して操舵制御する。


 (もっと読む)
(もっと読む)
1 - 11 / 11
[ Back to top ]