
Fターム[3D034CD18]の内容
操向リンク系及び4WS (6,986) | 4WSの検出(入力信号) (1,597) | センサ (77)
Fターム[3D034CD18]に分類される特許
1 - 20 / 77
後輪転舵装置
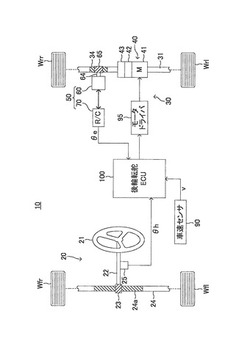
【課題】後輪舵角の中立位置の検出精度を向上させて、良好な車両直進性能を得る。
【解決手段】転舵ロッド31の軸線方向の移動によりロータが回転するレゾルバ60を設ける。レゾルバ60は、後輪舵角が中立位置となるときの電気角が0度、90度、180度、270度の何れかになるようにステータに対するロータの回転位置が設定されている。これにより、後輪舵角の中立位置において、レゾルバ60の2相検出信号から計算される電気角θeに誤差が発生しなくなり、後輪舵角を中立位置に維持することができる。この結果、車両の直進性能が向上する。
(もっと読む)
走行駆動換向装置

【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両用操舵伝達比可変式操舵装置
【課題】操舵伝達比可変式操舵装置により操舵伝達比が変更された後に操舵装置に残存するオフセットに起因して運転者が操舵操作時に覚える違和感を低減する。
【解決手段】操舵伝達比可変装置14によって操舵伝達比を変更する特定の制御によりオフセットが生じたときには(S180〜200)、特定の制御が終了する際のステアリングホイール20の操舵位置を基準操舵位置とし、基準操舵位置の両側の二つの操舵領域のうちステアリングホイール20の車両直進位置に対しオフセットの側と同一の側の操舵領域を第一の操舵領域とし、オフセットが0であるときの操舵伝達比を標準の操舵伝達比とする。特定の制御の終了後に運転者が第一の操舵領域に於いて操舵操作する場合には(S160)、目標ステアリングギヤ比Rstを標準よりも小さくすることにより(S210)操舵伝達比を標準の操舵伝達比よりも大きくする。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
車両操舵装置
【課題】少なくとも前輪の転舵角及び車速に基づいて左右の後輪舵角を変更可能とする車両操舵装置において、雨天時の後輪タイヤによる泥水の跳ね上げを少なくする。
【解決手段】ワイパ速度センサや雨滴センサの入力信号に基づいて走行中における降雨量を推定する降雨量推定手段と、後輪の目標舵角が、推定降雨量に対応して設定される、許容最大舵角を超えないように制限する補正手段とを備えて、降雨時の後輪の可動角度を制限するようにした。
(もっと読む)
四輪操舵装置
【課題】後輪21が脱輪した場合にも容易に復帰可能な四輪操舵装置1を提供する。
【解決手段】運転者の操舵に応じて後輪21を転舵するアクチュエータ25と、所定車速以下でアクチュエータ25による後輪21の転舵を禁止する後輪転舵禁止手段8aとを備えた四輪操舵装置1において、後輪21に配置された懸架装置10の伸長量を検出するストロークセンサ26を設け、後輪転舵禁止手段8aは、伸長量が所定値以上の場合には、後輪21の転舵を禁止しない。後輪21が脱輪した場合には懸架装置10が通常の場合より伸長するので、その伸長量が所定値以上か否かを判定することにより、後輪が脱輪しているか否かを検出することができる。後輪が脱輪している場合に、後輪転舵禁止手段は後輪の転舵を禁止しないので、後輪を転舵させることができ脱輪から容易に復帰することができる。
(もっと読む)
電気自動車の制御装置
【課題】 失陥していない電動モータにより車両の走行を継続できる電気自動車の制御装置を提供する。
【解決手段】 目標駆動力生成部16は、モータの一方が失陥した場合、車両の加速を禁止するフェールセーフ制御を実施し、フェールセーフ制御中に車両が安定走行状態となった場合には、車両の加速を許可するリンプホーム制御へ移行する。
(もっと読む)
後輪舵角制御装置
【課題】後輪舵角の限度を路面の凹凸の状態に基づいて決定し、後輪舵角を目標値通りに制御できる機会を多くすること。
【解決手段】車輪が路面の凹凸によりバウンドしたりリバウンドしたりすると、車輪が転舵可能な角度の上限値(限度)も変化する。一般的には、車輪がバウンドする(車高が小さくなる)と、車輪が車体に接近し、隙間が小さくなるため限度も小さくなる。そこで、後輪12が通過する路面の凹凸の状態が、前輪10の上下方向の挙動に基づいて予測され、その予測された路面の凹凸の状態に基づいて限度が決定される。そして、後輪12がその路面を通過する場合に、後輪12の転舵角度が、決定された限度を超えない大きさに制御される。
(もっと読む)
車両舵取り装置
【課題】タイミングベルトにて連動する複数の操舵軸を独立して回転させることにより、本体を移動させずにその位置で自由な方向に回転させることができる車両舵取り装置を提供する。
【解決手段】車両12の本体14に回動自在に保持された三個以上の操舵軸16と、各操舵軸16にそれぞれ設けられた駆動輪22と、各駆動輪22を独立して回転駆動するためにそれぞれ設けられた駆動源(駆動モータ30)と、各操舵軸16を連動して回動させるための連動装置(タイミングベルト34)と、この連動装置(タイミングベルト34)による各操舵軸16の連動を解除するための連動解除手段(解除クラッチ36)と、少なくとも一つの操舵軸16を本体14に固定するための固定手段(固定クラッチ38)とを備える。
(もっと読む)
舵角制御装置
【課題】ドライバーにとってイメージが容易であり所望の車両挙動を得ることが可能な舵角制御装置の提供。
【解決手段】前輪舵角と後輪舵角との一方または両方がドライバの操舵操作によらず制御可能な現実の車両の挙動を制御する装置であって、現実の車両とは異なるホイールベースL+Ldに設定可能な、仮想の車両を車両モデル化した仮想車両モデル100MIを有し、ドライバの操舵操作が仮想車両モデル100MIに入力された際の車両挙動であるヨーレートと横滑り角との少なくとも一方と、現実の車両の車両挙動におけるそれとを一致させるよう現実の車両の前輪舵角と後輪舵角との少なくとも一方を制御する舵角制御装置。
(もっと読む)
舵角制御装置
【課題】ドライバーにとってイメージが容易であり所望の車両挙動を得ることが可能な舵角制御装置の提供。
【解決手段】ドライバーの操舵操作によらず制御により操舵可能な現実の車両の車重m及び/又はヨー慣性モーメントIが、仮想の車両の仮想車重m+md及び/又は仮想ヨー慣性モーメントI+Idと異なるとの条件を満たしつつ、現実の車両をモデル化した現実車両モデル100MRの車両挙動を、仮想の車両をモデル化した仮想車両モデル100MIの車両挙動に一致させ、また横滑り角とヨーレイトとの少なくとも一方を各車両モデル100MR、100MIで一致させるように、現実車両モデル100MRの舵角を算出し、現実の車両の車両挙動を仮想の車両の車両挙動に一致させるように現実の車両の舵角を制御する。
(もっと読む)
ステアリング装置付きサスペンション
【課題】 車輪の転舵角を大きくできるステアリング装置付きサスペンションを提供する。
【解決手段】 ステアリング装置は、車両幅方向に伸び第1ジョイント16fL〜16rRにて転舵手段に連結したステアリング・シャフト6fL〜6rRと、これに第2ジョイント17fL〜17rRにて連結した変向歯車組及びこれに噛み合う転舵歯車組を支持する第1アクスル・ハウジング7fL〜7rRと、これに揺動可能に取り付けられて転舵歯車組により回動し車輪10f〜10rRを転舵する第2アクスル・ハウジング8fL〜8rRとを有する。サスペンションは、第1アクスル・ハウジング及び車体30間を揺動可能に支持するロア側リンク部材13fL〜13rR及びアッパ側サスペンション部材11fL〜11rRを有する。ステアリング・シャフトに車体及び第1アクスル・ハウジング間を揺動可能に連結するサスペンションのリンク機能を持たせた。
(もっと読む)
ステアリング装置付きサスペンション
【課題】 簡単な制御で、通常走行、完全横移動、大転舵操舵、その場回転のうち少なくとも一つの転舵モードを得るステアリング装置付きサスペンションを提供する。
【解決手段】 ステアリング装置は、前後輪側ステアリング・シャフト6fL〜6rRと、これらを運転者の操舵に応じて回転させる転舵手段と、ナックル9fL〜9rRと前後輪側ステアリング・シャフトとの間で回転軸心の方向を変える変向歯車組7fL〜7rRと、前後輪側分割した左右のステアリング・シャフトの正逆転方向を切替える正逆転切替手段5f、5rとを有する。サスペンションは、ナックルをそれぞれ車体30に揺動可能に支持するロア側リンク部材13fL〜13rR及びアッパ側サスペンション部材11fL〜11rRとを有する。ステアリング・シャフト6fL〜6rRを、車体及びナックルに対し揺動可能な状態でリンク部材に支持してサスペンションのリンク機能を持たせた。
(もっと読む)
後輪操舵装置
【課題】 極低速走行時においても電動モータの消費電力を抑えつつ後輪を転舵できるようにする。
【解決手段】 ハンドル舵角θhから基本目標後輪転舵角δr0*(n)を算出する(S401)。左右後輪の車輪速センサの出力するパルス信号のカウント値Npl,Nprからタイヤ転がり距離Xを算出する(S402)。タイヤ転がり距離XにゲインGを乗じた値を許容舵角変化量G・Xとし、基本目標後輪転舵角δr0*(n)と直前回の目標後輪転舵角δr*(n-1)との偏差が許容舵角変化量G・Xより大きい場合には(S403:Yes)、直前回の目標後輪転舵角δr*(n-1)に許容舵角変化量G・Xを加算また減算して目標後輪転舵角δr*(n)を算出する(S406,S407)。
(もっと読む)
車両停止保持装置
【課題】制動力保持機能を備えた車両が、滑り易い道路を発進する場合を想定し、運転者の操舵操作を補助して車両姿勢の立直しを確実に図ることを可能とした車両停止保持装置を提案する。
【解決手段】ブレーキペダルの踏込の操作後、当該踏込操作が解除されたときに車輪の制動力を保持可能とする制動力保持手段を有している車両停止保持装置において、前記制動力保持手段が起動しているときに、走行路に対する車両の移動の有無を検出する移動検出手段と、前記車両の操舵角を検出する操舵角検出手段を含み、前記移動検出手段が車両の移動を検出したときに、運転者による操舵操作に応じて車両のヨー挙動を制御するヨー挙動制御手段とを備える。運転者によるステアリング操作を積極的にアシストするので、車両が滑り易い道路に停車した後に発進するときに発生する滑りに対して有効に対処しながら車両姿勢を修正できる。
(もっと読む)
センサー構造
【課題】温度上昇に伴うセンサーハウジング内の内圧の上昇を抑制し、センサーハウジングの変形を抑制し、構造が簡単なセンサー構造を提供する。
【解決手段】センサー構造11は、対象物(被検出部)125を検出する検出部12がセンサーハウジング14内に空間部41を持って配置され、空間部41を、対象物125を有するアクチュエータ31のアクチュエータハウジング80内に連通させた連通路25を備える。連通路25は、アクチュエータハウジング内に設けてアクチュエータのロッド(出力ロッド)84を配置している第2の空間部137に連通している。
(もっと読む)
電動アクチュエータの駆動制御装置
【課題】電動アクチュエータに設置されたストロークセンサのゲイン異常の有無を簡易な構成により検出可能とする。
【解決手段】出力ロッド33がモータ41によって進退駆動される電動アクチュエータ11の駆動制御装置19が、出力ロッドの進退ストロークを検出するストロークセンサ18と、ストロークセンサの検出結果から得られる出力ロッドのストローク速度検出値と、モータの駆動デューティ比や電力・電圧値等の駆動情報から得られる出力ロッドのストローク速度推定値とを比較することにより、ストロークセンサのゲイン異常の有無を判定するゲイン異常判定部84とを備えた構成とする。
(もっと読む)
車両の後輪トー角制御装置
【課題】アクチュエータの動作位置を検出する位置センサの故障を検知するにあたり、位置センサの構成を簡素化して製造コストを削減する。
【解決手段】車両の左右の後輪のトー角を個別に変化させる左右のアクチュエータと、このアクチュエータの動作位置を検出するストロークセンサとを有し、車両の走行状態に応じて求められた制御指示値及びストロークセンサによる実測値に基づいてアクチュエータを制御する後輪トー角制御装置において、ストロークセンサによる実測値と制御指示値との比較により故障が疑われる異常状態が、車両の旋回時の横力によるアクチュエータに対する負荷状態に応じて設定された判定時間が経過するまで継続した場合に、ストロークセンサの故障と判定するようにする。
(もっと読む)
後輪転舵車両
【課題】自車両が走行車線から逸脱した場合であっても、迅速かつ安定的に元の走行車線に復帰することを可能とする。
【解決手段】左右の後輪5を独立して転舵させるアクチュエータ13と、アクチュエータを駆動制御する後輪トー角設定部42と、走行車線からの逸脱を検出する車線逸脱検出部43と、運転者によるステアリング操作を検出する操舵角センサ23とを備えた自動車1において、走行車線からの逸脱とともに運転者による元の走行車線への復帰操作が検出された場合、後輪トー角設定部が、旋回内側の後輪を中立に保持するとともに、旋回外側の後輪をトーインまたはトーアウト側に転舵させる構成とする。
(もっと読む)
1 - 20 / 77
[ Back to top ]