
Fターム[3D036GG35]の内容
動力伝達制御装置の配置、取付け (4,463) | 動力伝達制御装置の入力信号 (477) | 車両の状態によるもの (442) | 速度 (154) | 車速 (54)
Fターム[3D036GG35]に分類される特許
1 - 20 / 54
作業車両の四輪駆動制御装置
【課題】本発明は、2WDから4WDに自動的に変更することで、安定して走行をすることを課題とする。
【解決手段】走行装置94が後輪32のみで駆動する2WDで走行中にアクセルペダル18を踏み込み操作から解除してエンジン回転をアイドリング状態にしたにも拘らず、走行速度センサ187が速度低下を示さない場合に、走行装置94の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。また、走行速度が所定速度以上で走行装置94の駆動を4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。また、主変速レバー14或いは副変速レバー15を所定の増速段以上に変速している場合に、走行装置94の駆動を2WDから4WDに変更することを特徴とする作業車両の四輪駆動制御装置とする。
(もっと読む)
車両の駆動状態制御装置

【課題】オンデマンド式駆動状態制御装置にて、クラッチ機構の経年変化等に起因する「2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化」を抑制すること。
【解決手段】2輪駆動走行(H2)モード選択時、前輪側ディファレンシャルと左右前輪の一方との間の車軸に介挿された切換機構が非接続状態とされ、クラッチ機構により調整される前輪側への分配トルクがゼロに維持される。4輪駆動走行(H4Auto)モード選択時、切換機構が接続状態とされ、分配トルクが走行状態に応じて調整される。車両の走行中且つH2モード選択時、前輪側プロペラシャフトの回転停止を条件に、クラッチ機構に印加される電流がゼロから徐々に増大され(t1)、前輪側プロペラシャフトの回転が開始する時点(t2)での電流の値が取得される。H4Autoモード選択時にて分配トルクの目標値がゼロのとき、前記取得された値の電流がクラッチ機構に印加される(t4以降)。
(もっと読む)
四輪駆動車
【課題】二輪駆動および四輪駆動を切替える切替クラッチとしてツーウェイクラッチを用いた場合に四輪駆動走行時のツーウェイクラッチのハンチングを防止できる四輪駆動車を提供する。
【解決手段】四輪駆動状態と二輪駆動状態とを切替可能な切替クラッチ43と、後輪10L、10Rとリヤドライブギヤ6の間で動力を伝達および遮断可能な断続クラッチ7、8とを備え、切替クラッチ43が、出力部材41に連結された内輪と、トランスファリングギヤ42に連結された外輪と、内輪と外輪の間に設けられたローラ46と、ローラ46を保持する保持器とを含み、内輪の回転速度が外輪の回転速度より速いとき、ローラ46が楔に噛み込むことにより四輪駆動状態に切替えられ、四輪駆動走行時、断続クラッチ7、8を伝達状態に切替えるとともに、切替クラッチ43が四輪駆動状態に維持されるよう内輪の回転速度を外輪の回転速度より速くなるように設定した。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記車両の走行状態が不安定である場合、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に要求する第2の制御手段と、前記主駆動輪駆動力及び前記副駆動輪駆動力の元である原動機駆動力を制御する第3の制御手段と、を備える。前記第3の制御手段は、前記副駆動輪制限駆動力に基づき前記原動機駆動力を減少させる。
(もっと読む)
自動変速装置
【課題】本発明は、走行装置の自動変速装置において、トロイダル変速機構を用いた自動変速装置の構成とし、バリエータの傾倒角変更を自動制御して滑らかな自動変速が行える自動変速装置を提供することが課題である。
【解決手段】入力ディスク4b,4bと出力ディスク4a,4aの間に設けるバリエータ5の傾倒角を変更することで変速伝動するトロイダル変速機構4と、遊星機構61と、高・低クラッチ30を設けたミッションケース1の自動変速装置において、設定速度変化率から算出する設定車速と、車速センサ150で検出する実走行車速を比較し、実走行車速が設定車速を越えるとバリエータ5の傾倒角変更出力を低下させる出力抑制手段を設けたことを特徴とする自動変速装置の構成とする。
(もっと読む)
車両の動力伝達制御装置
【課題】分配トルクが調整可能なトランスファを備えた車両の動力伝達制御装置において、タイトコーナーブレーキング現象を抑制し得るものを提供すること。
【解決手段】車両のトランスファに設けられた多板クラッチ機構により調整される分配トルクTc=0のとき2輪駆動状態が得られ、Tc>0のとき4輪駆動状態が得られる。Tcは、アクセル開度及びエンジン回転速度に基づいて得られる基本値Tc1に、車速V、舵角θs、及び路面摩擦係数μに基づいて得られる補正ゲインGを乗じることで決定される。θs=0(直進時)のとき、G=1となり、Tc=Tc1となる。θs>0(旋回時)のとき、Gは、0<G<1の値であって、θsが大きいほど、Vが大きいほど、且つ、μが大きいほど、より小さい値に決定される。この結果、分配トルクTcは、θsが大きいほど、Vが大きいほど、且つ、μが大きいほど、より小さい値に決定される。
(もっと読む)
四輪駆動車両の駆動力配分制御装置
【課題】車両挙動を不安定にしたり、カント路面を駆け上がるモーメントを発生させることのない、オーバーステアおよびアンダーステア緩和用左右駆動力差制御を提供する。
【解決手段】S14でオーバーステアと判定する場合、S17で後輪合計駆動力用のフィードバック制御係数K1を0とし、後輪駆動力差用のフィードバック制御係数K2も0とすることで、二輪駆動走行状態にする。よって当該オーバーステア状態で、四輪駆動走行されることによる旋回走行不安定を回避することができる。S15でアンダーステアと判定する場合、S18でK1=1とし、K2=0とすることにより、四輪駆動走行させるも左右後輪間に駆動力差を設定しない。これにより、当該アンダーステア状態で四輪駆動走行による優れた走破性を享受しつつ、左右後輪間に駆動力差が設定されることによる、カント路面駆け上がり現象を回避することができる。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 左右の駆動輪に駆動力を配分制御してヨー運動を制御する際に、ヨー運動の制御初期の応答性を確保しながら、過制御により車両が不安定になるのを防止する。
【解決手段】 駆動源からの駆動力を左右の駆動輪に配分する駆動力配分量を車両の横方向挙動の状態量に基づいて制御する際に、前記駆動力配分量を、操舵角速度算出手段32で算出した操舵角速度θ′と横加速度変化率算出手段31で算出した横加速度変化率YG′とに基づいて補正するので、操舵角θよりも立ち上がりの変化が大きい操舵角速度θ′によりヨー運動の制御初期の応答性を確保しながら、車両の実際のヨー運動の状態を表す状態量である横加速度変化率YG′を用いることで、車両の横方向の運動性能の変化をフィードバックして駆動力配分制御に反映させ、これにより駆動力配分制御が過制御に陥るのを効果的に防止することができる。
(もっと読む)
車両の四輪駆動制御装置及び四輪駆動制御方法
【課題】回生制動の回生エネルギーの減少を抑制することが可能な、車両の四輪駆動制御装置及び四輪駆動制御方法を提供する。
【解決手段】4WD回生エネルギー演算手段34が、クラッチ8を締結状態とし、且つモータ6の回生制動を伴う旋回時に前輪1と後輪2との間で発生するフリクショントルクに基づいて、4WD回生エネルギーを演算し、クラッチ制御手段42が、回生エネルギー判定手段38が2WD回生エネルギーよりも4WD回生エネルギーが大きいと判定すると、クラッチ8を締結状態として、前輪1とモータ6との間の駆動力伝達経路を接続し、回生エネルギー判定手段38が4WD回生エネルギーよりも2WD回生エネルギーが大きいと判定すると、クラッチ8を解放状態として、前輪1とモータ6との間の駆動力伝達経路を遮断する。
(もっと読む)
車両運動制御装置
【課題】セルフステア状態が発生しても、実ヨーレートを適正に制御できる車両運動制御装置を提供する。
【解決手段】予め取り決められた規範ヨーレートを目標値として車両に発生する実ヨーレートを制御するダイレクトヨーコントロールデバイスを有し、ステアリング装置にセルフステアが発生すると、規範ヨーレートに替えて、実ヨーレートを抑制するように目標値を設定する。セルフステア状態を原因として発生する実ヨーレートを、一律に抑制して低減させるので、運転者に違和感を与えることのない適正な制御を実ヨーレートに行うことができる。
(もっと読む)
車両
【課題】ドアを開いた状態で運転手が不用意にフットブレーキから足を離しても、オートマチック車のクリープ現象や坂道で車両が動き出してしまうのを防止できるよう、安全対策を万全にした車両を提供する。
【解決手段】車両1が停車してドア2が開いている状態では、動力伝達装置9による駆動力の伝達を禁止するとともに、駐車ブレーキ8を作動させる。駐車ブレーキ8を作動させた状態で、ドア2が閉じられ、フットブレーキ5が作動している場合は、駐車ブレーキ8を解除し、動力伝達装置9による駆動力の伝達を許可する。車両1が動いている状態で、ドア2の開閉スイッチが開にされたとき、ドア2が開くことを禁止し、停止を検出したときに、開閉スイッチが一旦閉にされて再び開にされたことを条件にドア2を開くようにした。
(もっと読む)
車両用制御装置
【課題】トルクステアの発生を確実に抑制することができる車両用制御装置を提供することを主たる目的とする。
【解決手段】車両に搭載され、上記車両の走行状態を検出する車両状態検出手段と、該車両状態検出手段の検出結果に基づいて、ホイール中心位置キングピンオフセットがタイヤ及びホイールのバウンド又はリバウンドに伴うストロークにより変化するサスペンション装置を制御する制御手段とを有する車両用制御装置であって、上記車両状態検出手段の検出結果が、車両速度が第1閾値より小さく、エンジントルクが第2閾値より大きく、前後加速度が第3閾値より大きい場合、上記制御手段は、上記サスペンション装置を構成するディファレンシャルギアをロックさせるようにした。
(もっと読む)
トランスファ装置
【課題】耐久性に優れた動力伝達系を有するトランスファ装置を提供する。
【解決手段】本発明は、2WDモードから4WDモードに切り替え可能なクラッチを締結することで4WDモードを選択するとき、クラッチが締結容量指令値C(o)で締結されるようにモータを制御するときの時間変化率Cs(t)を、当該締結容量指令値C(o)及び車速VSP等の走行状態に応じて可変とする。
(もっと読む)
走行アドバイス装置
【課題】 本発明は、車両の運転者に車両操作をアドバイスする走行アドバイス装置に関し、GPS装置等からの標高情報により路面の傾斜状態を容易,確実に求め適切なアドバイスをすることを目的とする。
【解決手段】 車両が現在位置する標高を検出する標高検出手段と、前記標高を時刻とともに記憶する記憶手段と、現在の標高と予め定められた所定時間前の標高の差から路面の傾斜状態を判断する判断手段と、前記傾斜状態に基づいて車両操作をアドバイスする制御手段とを有することを特徴とする。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】ドリフト走行時等において好適な旋回走行を実現するヨー制御を行う車両用動力伝達装置の制御装置を提供する。
【解決手段】予め定められた関係から前輪の横滑り角βf及び車体の速度Vに基づいて目標ヨー角速度γrefを算出する目標ヨー角速度算出手段66と、その目標ヨー角速度算出手段66により算出された目標ヨー角速度γrefに応じたヨーモーメントが得られるように前記トルク配分制御装置50の作動を制御するヨーモーメント制御手段70とを、備えたものであることから、車体の横滑り角が比較的大きいドリフト走行時においても、前輪横滑り角が旋回方向内側を向いている場合には旋回アシスト方向のヨーモーメントを発生させる等、ドリフト走行を妨げないヨー制御が実現できる。
(もっと読む)
前後輪駆動車両の駆動状態切替制御装置
【課題】簡単な構成で好適な駆動状態の切り替えを実現する前後輪駆動車両の駆動状態切替制御装置を提供する。
【解決手段】2輪駆動状態から4輪駆動状態への切り替えに際して、シンクロ機構60の同期を判定するSNR同期判定手段82(S6)と、そのSNR同期判定手段82によりシンクロ機構60の同期が判定された場合には、前輪用差動装置30と前輪34rとの間の動力伝達を接続させるように噛合クラッチ36を切り替えるADD断続切替制御手段84(S7)とを、備えたものであることから、シンクロ機構60の同期完了後に噛合クラッチ36を接続させて、前輪34rと前輪用プロペラシャフト28との間の動力伝達を成立させた後にそのシンクロ機構60におけるシンクロナイザリング68を押し分ける作動を行うことで、その作動に要する推力を可及的に小さくすることができ、特別な構成を設けることなく好適な切り替えを行うことができる。
(もっと読む)
トルクベクトリングデバイスとその制御方法
路上走行車両上の駆動軸の2つの車輪(7)に異なるトルクを自由に誘導するためのトルクベクトリングデバイス(9)である。トルクベクトリングデバイス(9)は、2つのギアスリーブ(28、29)のいずれかに前記駆動シャフト(8)を連結するように意図されている係合状態で、前記トルクベクトリングデバイス(9)を通って延びている前記駆動シャフト(8)に連結されている、油圧で制御される2つのディスククラッチ(26,27)であって、それぞれのディスククラッチが、前記駆動シャフト(8)に対して偏心的に支えられている偏心管(23)とスプライン係合している、前記2つのディスククラッチ(26、27)と、前記偏心管(23)と差動装置ケーススリーブ(22)との間で1:1のギア比を有するトルク伝達機構(25)であって、前記駆動シャフトと同軸で、前記駆動軸上の前記トルクベクトリングデバイス(9)が連結されている差動装置(6)の差動装置ケースの一部を形成する、前記トルク伝達機構(25)と、を有することを特徴とするトルクベクトリングデバイス。 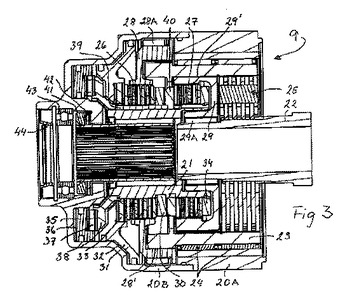 (もっと読む)
(もっと読む)
4輪駆動車の駆動力制御装置
【課題】 制限車速以下の車速領域では音振性能を損なうことなく4輪駆動での旋回時における旋回挙動の安定化を図ることができる4輪駆動車の駆動力制御装置を提供する。
【解決手段】 車両の実ヨーレイトを検出するヨーレイトセンサ8を備え、4WD制御コントローラ5は、車両の前後方向の状態に基づいて演算される基準目標トルク配分値と、実ヨーレイトと車両の状態により演算された目標ヨーレイトとの偏差から得られる要求トルクゲイン値と、に基づいてモータ3を駆動すると共に、トルク配分禁止車速を超える車速領域では、モータ3の駆動を中止する。
(もっと読む)
変速指示装置、変速指示方法およびその方法をコンピュータで実現されるプログラムならびにそのプログラムを記録した記録媒体
【課題】運転者に対して車両の状態に応じて適切な変速指示を行なう。
【解決手段】ECUは、ダウンシフトが行なわれた後(S202にてYES)、変速操作が完了すると(S204にてYES)、タイマを起動するステップ(S206)と、ダウンシフト要求があると(S208にてNO,S218にてYES)、タイマ値Dを設定するステップ(S220)と、タイマ値Dに対応する時間が経過して(S222にてYES)、ダウンシフト指示灯の点灯条件が成立すると(S224にてYES)、点灯制御を実行するステップとを含む、プログラムを実行する。
(もっと読む)
1 - 20 / 54
[ Back to top ]