
Fターム[3D041AD15]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | 推進装置、エンジン (3,466) | エンジンブレーキ (27)
Fターム[3D041AD15]に分類される特許
1 - 20 / 27
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
油圧制御装置

【課題】エンジンにより駆動されるオイルポンプの油圧をアキュムレータに蓄圧する油圧制御装置を提供する。
【解決手段】動力伝達装置の動力伝達状態を制御する油圧室と、エンジンにより駆動される第1オイルポンプと、電動モータにより駆動され、かつ、第1オイルポンプよりも容量が大きい第2オイルポンプと、第1オイルポンプまたは第2オイルポンプから吐出された油圧を蓄圧するアキュムレータとを有し、第1オイルポンプまたは第2オイルポンプのいずれか一方から吐出された油圧をアキュムレータに蓄圧する油圧制御装置において、油圧室のオイルの消費量が変化するかしないかを判断する判断手段(ステップS1,S2,S3)と、動力伝達装置の油圧室におけるオイルの消費量が変化しないときに、第1オイルポンプの油圧をアキュムレータに蓄圧する蓄圧手段(ステップS4,S5)とを備えている。
(もっと読む)
車両の空調および制動制御装置
【課題】車両減速中における空調装置の蓄冷器への蓄冷中に、圧縮機による冷媒供給が停止することにより発生する、圧縮機減速トルク消失による制動距離の増加や、乗員の不快感を抑制する。
【解決手段】蓄冷器40に蓄冷中に、それ以上の蓄冷が不可能になり、圧縮機1の作動を停止させたときに、空調用制御装置5から、変速機制御装置54に信号を送信し、無段変速機50の減速比を増加させて、圧縮機減速トルク消失にともなう、最終減速トルクの不足を補う。無段変速機50の代わりに、車両用交流発電機や、モータジェネレータの出力を増加させるように制御しても良いし、自動ブレーキ装置を差動させても良い。また、これら変速機50等のいずれかを選択しても、組み合わせて使用しても良い。
(もっと読む)
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
(もっと読む)
車両の制駆動力制御装置
【課題】車両の制駆動力制御装置において、車両の走行状態に拘らず駆動力配分機構への過渡的な荷重入力を回避して耐久性の低下を図る。
【解決手段】車両の駆動輪17L,17Rに駆動力を付与するエンジン11と、この駆動力を左右の駆動輪17L,17Rへの配分を行う制御デフ15と、左右の駆動輪17L,17Rに対して独立して制動力を付与する電子制御式ブレーキ装置18とを設け、ECU31は、車両の運転状態に応じてエンジン11と制御デフ15と電子制御式ブレーキ装置18を制御可能に構成し、このECU31は、電子制御式ブレーキ装置18が作動するときに制御デフ15の作動を中止する。
(もっと読む)
車両の制動力制御装置
【課題】 種々の車両の前後方向の加減速度制御の要求に基づいて、車両の駆動系装置及び制動系装置の作動を統合的に制御しようとする場合に有利に用いられる車両用の制動力制御装置を提供すること。
【解決手段】 車両の制動力制御装置100は、車両全体に於いて発生されるべき要求制駆動力を取得する手段100,200と、駆動系装置に於いて発生可能な制駆動力を取得する手段100,210と、制動系装置の作動を制御する手段100,220とを含み、駆動系装置に於いて発生可能な制駆動力に応じて制動系装置を作動させることを特徴とする。
(もっと読む)
車両の制御装置
【課題】摩擦力により車輪の回転を抑制するブレーキ装置において熱エネルギとして捨てられるエネルギを小さくする。
【解決手段】ECUは、ブレーキペダルの操作量に基づいて操作車両の目標減速度を設定するステップ(S110)と、目標減速度をブレーキ装置の制動力による第1の減速度およびパワートレーンの制動力による第2の減速度に分配するステップ(S120)と、第1の減速度を実現するようにブレーキ装置を制御するステップ(S130)と、第2の減速度に基づいて、ベルト式無段変速機の変速比を設定するステップ(S140)と、設定された変速比になるようにベルト式無段変速機を制御するステップ(S150)とを含む、プログラムを実行する。
(もっと読む)
車両の制御装置
【課題】シフトレバーへの操作がなされた場合に運転者の要求通りに車両を減速させる。
【解決手段】ECUは、ブレーキペダルの操作量に基づいて操作車両の目標減速度を設定するステップ(S100)と、ブレーキ装置からの制動力による減速度が目標減速度になるように、ブレーキ装置を制御するステップ(S120)と、ベルト式無段変速機をダウンシフトさせるようにシフトレバーが操作された場合(S150にてYES)、パワートレーンからの制動力、すなわちエンジンブレーキによる減速度が目標減速度になる変速比になるようにベルト式無段変速機を制御するステップ(S160)と、ブレーキ装置による減速度が漸増するように、ブレーキ装置を制御するステップ(S170)とを含む、プログラムを実行する。
(もっと読む)
車線逸脱防止装置及び車両用前照灯制御装置
【課題】走行車線から自車両が逸脱する場合に、本来の走行車線に対する運転者の認識状態を向上させることができる。
【解決手段】車両は、走行車線に対する自車両の横変位X及びヨー角φに基づいて、走行車線に対する自車両の逸脱傾向を判定し(ステップS4)、その判定結果に基づいて、走行車線に対する自車両の逸脱を防止する逸脱防止制御を行い(ステップS6、ステップS8〜ステップS11)、その一方で、前記横変位X及びヨー角φに基づいて、前照灯の照射角度を制御する(ステップS7)。
(もっと読む)
車両の制動装置
【課題】回生制動発生手段を優先的に使用して制動力を発生させることによってエネルギーを効率良く回生することができる。
【解決手段】制動装置は、発電機4と、メイン排気シャッタバルブ7と、サブ排気シャッタバルブ8と、排気ブレーキスイッチ10と、CPU20と、を備える。CPU20は、車両の走行状態がエンジンブレーキ作動状態であると判定したことに基づいて、発電機4による回生制動を発生させる。CPU20は、車両の走行状態がエンジンブレーキ作動状態であると判定し、且つ排気ブレーキスイッチ10によって運転者から排気制動の発生指示が入力されたと判定した場合、判定したギア段に応じてメイン排気シャッタバルブ7及びサブ排気シャッタバルブ8を制御する。CPU20は、ギア段が4th段であると判定したとき、メイン排気シャッタバルブ7とサブ排気シャッタバルブ8とをそれぞれ閉状態と開状態とに設定する。
(もっと読む)
ハイブリッド車両の車間制御装置
【課題】 車間制御による走行時、車間距離情報にあらわれた加速意図に応じて高い加速応答性を発揮することにより、先行車への追従性や先行車追越し性を高めることができると共に、燃費向上にも寄与することができるハイブリッド車両の車間制御装置を提供すること。
【解決手段】 モータ303とエンジン305を駆動系に有し、先行車の捕捉時、設定された自車との車間距離を維持するように制駆動力を制御する車間制御システムを備えたハイブリッド車両の車間制御装置において、車間制御による走行時、前記車間制御システムから入力した車間距離情報が応答性の高い駆動力を要求する情報を示すほど、要求駆動力に対し前記モータ303により分担する駆動力配分比を高く設定するモータ−エンジン駆動力配分比設定手段(ステップS4)を設けた。
(もっと読む)
自動制動制御装置
【課題】トラックやバスにおける自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に段階的な制動制御を行う。例えば、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる。また、自車速が所定値以下であり、操舵角あるいはヨーレイトのとる値が所定範囲外であるときには、段階的制動制御の起動を禁止する。さらに、変速制御による自動制動制御への影響を除去する。あるいは、変速制御により自動制動制御を援助する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速時に、燃費向上を図り、効率良く回生を行うことのできるハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の運転状態に基づいて、エンジンのクランク軸におけるクランク端目標トルクを算出し、クランク端目標トルクが予め定められる所定値よりも小さい場合にハイブリッド車両の減速状態と判断し、その直後からロックアップクラッチを締結し、減速状態が判断された場合に、クランク端目標トルクに基づき、エンジンのエンジン目標トルク及びモータジェネレータのモータ目標トルクを算出し、減速トルク算出手段により算出された前記モータ目標トルクに基づいて、モータジェネレータによる回生が行われるよう制御する。
(もっと読む)
車両の減速制御装置
【課題】車両に対してガード値の範囲内で減速度を付与する車両の減速制御装置であって、ガード値をより適正な値に設定することの可能な車両の減速制御装置を提供する。
【解決手段】車両の走行環境パラメータに基づいて、前記車両に対してガード値の範囲内で減速度を付与する(S9、S10)車両の減速制御装置であって、運転者の操作による減速特性を判定する判定手段(S1)と、前記運転者の操作による減速特性に基づいて、前記ガード値を変更する変更手段(S4)とを備えている。前記判定手段は、運転者の操作による減速のタイミング、ブレーキの操作時間、及びブレーキ操作により発生させる減速度の少なくともいずれか一方に基づいて、前記運転者の操作による減速特性を判定することができる。
(もっと読む)
エンジンの制御装置
【課題】 車両が走行する道路環境に応じた制動力を車両に付与する。
【解決手段】 ECUは、アクセル開度Pがしきい値P(1)より小さいと(S110にてYES)、ナビゲーションシステムから取得した情報に基づいて、エンジンブレーキが必要な状況か否かを判別するステップ(S120)と、エンジンブレーキが必要である状況であると(S120にてYES)、所望の制動力のエンジンブレーキが作用するようなリフト量で吸気バルブおよび排気バルブが動作するように、バルブのリフト量を変更するVVL機構を制御するステップ(S130)と、エンジンブレーキが必要である状況でないと(S120にてNO)、吸気バルブおよび排気バルブのリフト量が最大になるようにVVL機構を制御するステップ(S140)とを含む、プログラムを実行する。
(もっと読む)
定速走行制御装置及び制御方法
【課題】オートクルーズ走行時で、降坂時のオーバーシュート量を抑制し、一定走行時の速度安定性を確保すること。
【解決手段】主制動装置B4と、複数の補助制動装置B1〜B3と、燃料噴射制御手段11と、定速走行制御を行うべく燃料噴射制御手段11をして燃料噴射量を制御せしめ且つ主制動装置B1及び複数の補助制動装置B1〜B3の作動を制御する定速走行制御手段10と、車速検出手段12と、エンジン負荷検出手段13と、を有する車両において、定速走行制御手段10は降坂時に目標車速に対して実車速が超過した場合に、最初に最も制動能力の低い補助制動装置B1を作動させ、それでも目標車速に対する実車速が超過していれば、次に制動能力の低い補助制動装置から順に作動させるべき補助制動装置B1〜B3を追加し、最後に主制動装置B4を作動させるべき制動装置に追加するように制御する。
(もっと読む)
変速機の制御装置
【課題】エンジンブレーキ作動中に車両がオーバーステア傾向になったときに車両安定性が確保されることが可能な変速機の制御装置を提供する。
【解決手段】オーバーステア状態か否かを判定する判定部(S102)と、オーバーステア状態と判定されたときに、エンジンブレーキ力が発生するときに係合する摩擦係合装置の油圧を低下させる制御部(S104)とを備えている。前記制御部は、前記油圧を漸次低下させることができる。更に、オーバーステア状態と判定されたときに車両の走行安定限界までの余裕度を判断する判断部を備え、前記制御部は、前記余裕度が大きいと判断された場合には、前記余裕度が小さいと判断された場合に比べて、前記油圧を漸次低下させるときの変化が小さくなるように制御することができる。
(もっと読む)
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
クルーズ制御装置
【課題】クルーズ制御に際し、実際の車速を目標速度により適切に追従させることのできるクルーズ制御装置を提供する。
【解決手段】ステップS14では、車両の加速度aに基づき、車両の走行方向に働く力を算出する。続くステップ16では、車速と目標速度との差と、車両に働く力とに基づき、車両を目標速度に保つために必要な駆動力を算出する。ステップS22では、算出される駆動力を、エンジンの出力と、ABSの制動力とに振り分け、ステップS24、S26では、振り分けられた出力や制動力を得られるような設定がなされる。
(もっと読む)
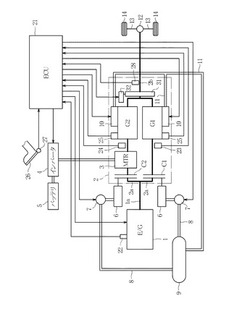
ハイブリッド車両のモード遷移制御装置
【課題】 モータ回生減速からエンジンブレーキへのスムーズな移行を達成し運転フィーリングの悪化を抑えることができるハイブリッド車両のモード遷移制御装置を提供する。
【解決手段】 ハイブリッド車両で、エンジンEとモータジェネレータMGとの間に第1クラッチCL1を介装すると共に前記モータジェネレータMGと駆動輪との間に第2クラッチCL2を介装し、前記モータジェネレータMGによるモータ回生減速時にエンジンブレーキ要求があるか否かを判断するエンジンブレーキ要求判断手段(ステップS3)を設け、前記モード遷移制御手段は、エンジンブレーキ要求判断に基づき、モータ回生減速からエンジンブレーキへの移行指令が出た場合(ステップS5)、締結されている前記第2クラッチCL2を開放側にした後、開放されている前記第1クラッチCL1を締結してエンジンブレーキへ移行する(ステップS6〜ステップS11)手段とした。
(もっと読む)
1 - 20 / 27
[ Back to top ]