
Fターム[3D043EE01]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける検出(入力信号) (1,677) | 自然環境、路面の状況 (81)
Fターム[3D043EE01]に分類される特許
1 - 20 / 81
四輪駆動車両の制御装置
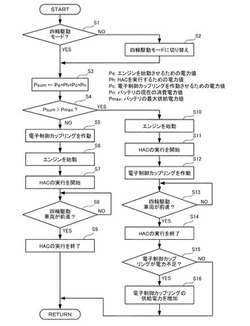
【課題】内燃機関、制動力制御装置および駆動力配分装置を作動させる電力が不足している状況であっても、安定した電力で駆動力配分装置を作動させることができる四輪駆動車両の制御装置を提供する。
【解決手段】ECUは、エンジンを始動させるために必要な所定の電力値Peと、HACのためにブレーキアクチュエータを作動させるために必要な所定の電力値Phと、電子制御カップリングを作動させるために必要な所定の電力値Pcと、バッテリの現在の消費電力値Pnの総和Psumを算出し(ステップS3)、算出した総和Psumがバッテリの最大供給電力値Pmaxより高いことを条件として(ステップS4)、エンジンを始動させ(ステップS10)、HACの実行を開始した後に(ステップS11)、電子制御カップリングを作動させる(ステップS12)。
(もっと読む)
四輪駆動車両の駆動力制御装置

【課題】四輪駆動車両において車輪速ハンチングの抑制と走行性能の確保との両立を図る。
【解決手段】前後トルク配分用クラッチ10によって後輪Wr,Wrに配分する駆動力を制御することで、前輪Wf,Wfを主駆動輪とし後輪Wr,Wrを副駆動輪とする制御を行う四輪駆動車両の駆動力制御装置において、前輪Wf,Wfのスリップが判定された場合に後輪Wr,Wrに差動制限トルクTr1を配分し、その配分開始時点の車両の駆動力D1を記憶し、記憶した駆動力D1に所定のオフセット量ΔDを加算した駆動力を差動制限トルクの配分停止時点を判断するための駆動力の閾値D2として設定し、車両の駆動力DAが設定された閾値D2よりも小さくなった時点で差動制限トルクTr1の配分を停止する。これにより、差動制限トルクの増減が繰り返されることによる車輪速ハンチングを抑制する。
(もっと読む)
油圧クラッチ装置
【課題】油圧クラッチ装置をコンパクト化する。
【解決手段】第一油圧クラッチ51Aで第一伝動経路52Aと前輪伝動軸50との間の伝動を入り切りし、第二油圧クラッチ51Bで第二伝動経路52Bと前輪伝動軸50との間の伝動を入り切りする前輪倍速装置14であって、各油圧クラッチ51A、51Bは、前輪伝動軸50に固定されるクラッチハブ53A、53Bと、クラッチハブ53A、53Bの外周に回転自在に遊嵌し、第一又は第二伝動経路52A、52Bに接続されるクラッチドラム54A、54Bと、クラッチドラム54A、54Bとクラッチハブ53A、53Bとにそれぞれ係合して交互に重なり合う複数の摩擦板55A、55Bと、を備え、クラッチピストン56A、56Bは、摩擦板55A、55Bをクラッチドラム54A、54Bの内壁54aに向けて押圧する。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
四輪駆動車駆動力配分制御装置
【課題】主駆動軸および従駆動輪に作用する軸重を考慮して、その軸重に応じた駆動力配分を行えるよう補正を行うことで、各駆動輪に適切な駆動トルクを配分できる四輪駆動車駆動力配分制御装置を提供する。
【解決手段】四輪駆動車駆動力配分制御装置において、四輪駆動車駆動力配分制御装置は、トルク対応締結力調整値と回転速度偏差対応締結力調整値との和である総締結力調整値を補正するための補正係数を決定する補正係数決定部と、車両の前後方向の傾きを検出する車両姿勢検出装置を備え、車両姿勢検出装置の検出結果に応じて補正係数を設定して総締結力調整値を補正する。
(もっと読む)
四輪駆動車及びその制御装置
【課題】2輪駆動状態での車両の発進時にスリップが発生した場合でも、噛み合いクラッチを介してトルクが伝達される補助駆動輪に速やかにトルクを伝達することが可能な四輪駆動車及びその制御装置を提供する。
【解決手段】四輪駆動車101は、駆動源であるエンジン102と、エンジン102のトルクを前輪104L,104R及び後輪105L,105Rに伝達する駆動力伝達系106と、駆動力伝達系106に設けられ、凹部と凸部との係合により後輪105L,105R側にトルクを伝達することが可能な噛み合いクラッチ130と、路面の摩擦係数に関連する指標値に基づいて、路面の摩擦係数が所定値よりも低いか否かを判定する判定手段9b1と、判定手段9b1により路面の摩擦係数が所定値よりも低いと判定されたとき、発進前に噛み合いクラッチ130の係合を行わせる制御信号を発生する制御手段9b2とを有する。
(もっと読む)
車両挙動制御装置
【課題】前後駆動力配分制御とブレーキ制御とを協調させて、操舵応答性とトラクション性能とを適切に両立させる。
【解決手段】エンジン駆動力Fdを算出し、該エンジン駆動力Fdに基づいて一次遅れ処理を行って前後軸間の締結トルクCawdを算出してトランスファクラッチ駆動部31に出力する。一方、エンジン駆動力Fdの時間的変化ΔFdに基づいて時間の経過と共に減衰する駆動力の変化に応じた制動力Fdtdを一次進み処理を行って算出し、駆動力の変化に応じた制動力Fdtdを基とするアクセル感応目標ヨーモーメントMdtを算出し、ハンドル角速度を基とする操舵感応目標ヨーモーメントMstを一次進み処理を行って算出し、これらアクセル感応目標ヨーモーメントMdtと操舵感応目標ヨーモーメントMstを基に旋回内側内輪に付加する制動力を算出してブレーキ駆動部32に出力する。
(もっと読む)
車両
【課題】車両の進路上の路面変化に対応した適切な駆動力配分を前以て実現することができる車両を提供する。
【解決手段】車両のメインECU3は、第1情報取得部4Aにより取得された第1情報から導出される第1位置の路面摩擦係数である第1摩擦係数μ1と、第2情報取得部4Bにより取得された第2情報から導出される第2位置の路面摩擦係数である第2摩擦係数μ2とから、車両の総駆動力の目標値を決定する。そして、総駆動力の目標値を満たし且つ第1摩擦係数μ1に対応したスリップ限界を超えないように、第1駆動力および第2駆動力の目標値を決定する。
(もっと読む)
駆動力配分装置の制御装置
【課題】加速性などを含む走行性を損なうことなく、駆動系の振動を低減させることが可能な駆動力配分装置の制御装置を提供することを目的とする。
【解決手段】駆動力配分装置10の制御装置20は、車両1の走行状態を判定する走行状態判定手段21と、駆動力配分装置10が走行状態に応じた配分割合で駆動力を配分するように駆動力配分装置10の作動を制御する制御手段22と、駆動系の振動を検出する振動検出手段23と、荷重比の変化量Δを検出する荷重検出手段24と、荷重比の変化量Δに基づいて制御手段22の配分割合を補正する補正手段25と、を備える。
(もっと読む)
車両の駆動力配分制御装置
【課題】この発明は、駆動系の保護制御が解除される時期を保護制御が解除されるべき時期に近づけることを可能とし、駆動系に与える損傷を軽減し、また、四輪駆動性能を十分発揮させることを目的とする。
【解決手段】この発明は、発熱量補正手段によって、不揮発性メモリに保存された発熱量および雰囲気温度はイグニションスイッチが次にオンされた時に直ちに読み出され、イグニションスイッチがオンされた時の雰囲気温度と、イグニションスイッチがオフされた時に保存された雰囲気温度とイグニションスイッチがオンされた時に検出された雰囲気温度との差分と、イグニションスイッチがオンされた時に検出された雰囲気温度と検出された外気温との差分とに基づいて、不揮発性メモリから読み出された発熱量を補正することを特徴とする。
(もっと読む)
四輪駆動車両のトルク配分制御装置
【課題】 四輪駆動車両が減速状態もしくは慣性走行状態から加速状態に移行する際のギヤの歯打ち音を低減するとともに車両のステア特性を改善する。
【解決手段】 推定駆動トルク算出部53が算出した駆動トルクに基づいて目標配分トルク算出手段54,56,58が副駆動輪に配分する目標配分トルクを算出し、目標配分トルクが第1閾値以下であり、かつ目標配分トルクの時間増加率が第2閾値以上のときに、クラッチトルク補正部60が目標配分トルクを増加方向に補正する。これにより、動力伝達系のギヤのバックラッシュの急激な消滅とエンジン回転数の変動とにより発生する歯打ち音を、前記動力伝達系に負荷を与えることにより抑制することができ、しかもトルク配分クラッチを速やかに締結して駆動源の駆動トルクを副駆動輪に配分する制御の応答性を高めることができるので、低摩擦係数の路面での車両挙動をアンダーステア傾向からニュートラルステア傾向に改善することができる。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】駆動状態を維持しつつ、油温の上昇を抑制する。
【解決手段】ECUは、車両の駆動状態が4輪駆動状態であって(S100にてYES)、作動油の温度が許容範囲内でなく(S102にてNO)、かつ、4輪駆動状態を継続する必要がある場合に(S104にてYES)、最高車速を変更する制御を実行するステップ(S106)と、4輪駆動状態を継続する必要がない場合に(S104にてNO)、車両の駆動状態を4輪駆動状態から2輪駆動状態に切換える制御を実行するステップ(S108)と、車速を制御するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
四輪駆動車両の駆動力制御装置
【課題】発進性の向上を図ることが可能な四輪駆動車両の駆動力制御装置を提供する。
【解決手段】四輪駆動車両の駆動力制御装置1は、エンジン2での発生トルクをトランスミッション30を介して主駆動輪1L、1Rで出力した場合の第1駆動力と、エンジン2での発生トルクにより発電機7で発電を行い、発電された電力によりモータを駆動させたときの発生トルクを従駆動輪3L、3Rで出力した場合の第2駆動力とのうち、どちらの駆動力が大きくなるかを判断する判断部と、判断部による判断結果に基づいて駆動力調整を行う駆動制御部とを備えている。
(もっと読む)
車両挙動制御装置
【課題】走行状態に応じて変動する各輪の状態を考慮してサスダンパによる可変減衰力制御と前後駆動力配分制御との協調を図り、車両の操縦安定性を向上させる。
【解決手段】制御ユニット30は、操舵操作に応じてサスダンパ制御装置24の制御信号Drs_d_sに一次遅れ処理を加えて補正し(Drs_d_mを算出し)、ロール剛性の前後軸配分Drsを演算して、旋回内輪の許容駆動力Fxfi_c、Fxri_cを算出し、旋回内輪の許容駆動力Fxfi_c、Fxri_cにより前後駆動力配分の目標値Dx_tを設定して前後駆動力配分制御装置18に出力する。また、旋回内側後輪の許容駆動力Fxri_cが少なくとも各輪の総駆動力Fxに基づいて設定した閾値より小さい場合は、サスダンパ制御装置24に対してサスダンパ制御補正値Drs_d_mを出力して後軸のロール剛性配分を低下させる。
(もっと読む)
前後輪駆動車両
【課題】前後輪が異なるμ路面に接地した状態であっても安定性を損なわずに走行可能な前後輪駆動車両を提供すること。
【解決手段】異なる動力源によって駆動される前後輪の一方の車輪である第1の車輪101L,101Rと他方の車輪である第2の車輪103L,103Rを独立して駆動可能な前後輪駆動車両は、前後輪の回転数比率がそれぞれ異なる複数のモードの内、当該前後輪駆動車両のドライバによって指定された1つのモードを当該前後輪駆動車両に設定するモード設定部115と、モード設定部115によって設定されたモードに応じて、第2の車輪を駆動する動力源123の回転数を制御する回転数制御部121とを備える。
(もっと読む)
車両の駆動制御装置及び駆動制御方法
【課題】クラッチ接続時のショックを抑えつつ、2輪駆動走行から4輪駆動走行への応答性を向上した車両の駆動制御を提供する。
【解決手段】主駆動輪を主駆動源で駆動し、主駆動輪と異なる従駆動輪をモータで駆動可能に構成する。モータから従駆動輪へのトルク伝達経路の途中にクラッチを配置し、4輪駆動条件を満足した状態では、クラッチを接続状態に制御してモータの駆動トルクを従駆動輪に伝達し、4輪駆動条件を満足しない2輪駆動走行中はクラッチを開放状態に制御する。上記2輪駆動走行中に4輪駆動条件となる可能性が高い状態となったと推定すると、クラッチの開放中に上記クラッチの従駆動輪側の回転数に当該クラッチのモータ側の回転数が同期するようにモータを駆動する。
(もっと読む)
車両用駆動制御装置
【課題】前輪のスリップを適切に判定し、適切に四輪駆動走行を行うことである。
【解決手段】車両用駆動制御装置は、車両重量及び車両に外部から作用する力のうちの少なくとも一方を検出するロールバック判定部51及び走行抵抗値設定部52と、検出した車両重量及び車両に外部から作用する力のうちの少なくとも一方を基に、車両速度推定手段が推定する車両速度を補正する推定車速補正部53とを備える。
(もっと読む)
油圧駆動車両
【課題】第一及び第二フレームにそれぞれ支持され且つ可変容積型第一油圧モータ及び固定容積型第二油圧モータによってそれぞれ駆動される第一及び第二車輪間に旋回半径差が生じるアーティキュレート型油圧駆動車両において、第一油圧モータに特別な構造を備えることなく、旋回半径差を補償する。
【解決手段】 第二フレームにカム面を有するカム押動部材が相対移動不能に設けられ、第一フレームに枢支軸回り相対移動不能且つ第1方向相対移動可能にカム従動部材が設けられる。カム面は、第一及び第二フレームの枢支軸回りの揺動量に応じた量だけカム従動部材が第1方向に移動するように構成され、カム従動部材の第1方向の動きを利用して第一油圧モータの容積量を増減する。
(もっと読む)
駆動力配分制御装置
【課題】障害物回避支援装置を備えた車両において回避性能を向上させることができる駆動力配分制御装置を提供する。
【解決手段】車両は、駆動力配分制御装置1と電動パワーステアリング装置2を備える。駆動力配分制御装置1は、前後輪の駆動力配分を行う前後輪駆動力配分制御部21と、後輪の左右輪の駆動力配分を異ならせることによりヨーモーメントを制御する後輪左右駆動力配分制御部22と、アクチュエータ制御部23と、制御ゲイン算出部24とを備える。電動パワーステアリング装置2は、車両前方の障害物を検知し該障害物との接触を回避する操作を支援する回避操作支援制御部42を備える。電動パワーステアリング装置2の回避操作支援制御部42が、障害物との接触を回避する操舵操作を支援する制御を行っているときには、後輪左右駆動力配分制御部22におけるヨーモーメント制御量のゲインを通常時よりも高める。
(もっと読む)
環境対策車及びその駆動力制御方法
【課題】前輪駆動系トルク制御機構及び後輪駆動系トルク制御機構によって前輪駆動系の駆動トルク及び制動トルクと後輪駆動系の駆動トルク及び制動トルクとをそれぞれ独立に制御するとともに、前輪駆動系トルク制御機構と後輪駆動系トルク制御機構との協調制御により前輪及び後輪のスリップコントロールを行うことによって、前輪駆動系トルク制御機構が推定した路面の摩擦係数に基づいて後輪駆動系の駆動トルク及び制動トルクを制御するようにして、路面状況が変動しても、ホイールスピン及びホイールロックが発生することなく、安定して走行することができ、安全性を向上させることができるようにする。
【解決手段】前後輪独立駆動型の環境対策車であって、前輪駆動系トルク制御機構と後輪駆動系トルク制御機構との協調制御により、前輪及び後輪のスリップコントロールを行う前後輪協調制御手段を有する。
(もっと読む)
1 - 20 / 81
[ Back to top ]