
Fターム[3D046BB29]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 車両安定性 (1,438) | トラクションコントロール (160)
Fターム[3D046BB29]に分類される特許
1 - 20 / 160
車両用トラクション制御装置
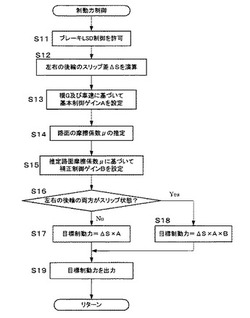
【課題】左右の駆動輪のスリップが交互に大きくなるスリップのハンチングを防止することが可能な車両用トラクション制御装置を提供する。
【解決手段】ディファレンシャル15を介して駆動力が伝達される左右の後輪12L、12Rを有する車両10に適用され、スキッドコントロールコンピュータ30が左右の後輪12L、12Rのうち加速スリップが大きい後輪に対して制動力を付加するトラクション制御装置において、スキッドコントロールコンピュータ30は、左右の後輪12L、12Rの両方がスリップしている場合、加速スリップが大きい後輪に対して付加する制動力を制限する。
(もっと読む)
自動車およびその制御方法

【課題】トラクション制御や姿勢保持制御の実行の有無に応じたストール発進を行なう。
【解決手段】ストール発進時にトラクションコントロールか姿勢保持制御のいずれかがオンの状態のときには回転数が低く調整された通常時の目標回転数設定用マップを用いてエンジン目標回転数Ne*を設定し(S130)、トラクションコントロールも姿勢保持制御もオフの状態のときにはより大きな回転数が目標回転数Ne*に設定されるオフ時の目標回転数設定用マップを用いてエンジンの目標回転数Ne*を設定し(S140)、設定した目標回転数Ne*によりエンジンが回転すると共にアクセル開度Accに応じた要求トルクTr*が駆動軸に出力されるようエンジンとモータMG1,MG2を制御する(S150〜S210)。これにより、トラクションコントロール(TRC)や姿勢保持制御(VSC)の実行の有無に応じたストール発進を行なうことができる。
(もっと読む)
タイヤ接地状態推定方法、タイヤ接地状態推定装置、タイヤ、及び、車輌制御装置
【課題】簡単な構成で走行中のタイヤの接地状態を精度よく推定することができるとともに、路面変化に対する追従性の高いタイヤの接地状態推定方法とその装置、タイヤの接地状態の推定に用いられるタイヤ、及び、車輌制御装置を提供する。
【解決手段】加速度センサ11をタイヤの赤道部近傍のブロック23B内部に、その検出方向がタイヤ回転方向になるように埋設するとともに、上記加速度センサ11の検出出力から蹴り出し時における上記ブロック23Bのタイヤ回転方向の振動波形を抽出し、この振動波形正側のピーク値Gの大きさに基づいて走行中のタイヤの接地状態を推定するようにした。
(もっと読む)
制駆動力制御装置
【課題】車輌が路面摩擦係数の異なる路面へと乗り移る際のドライバビリティ向上
【解決手段】車輌の前輪10FL,10FR側で測定した路面摩擦係数の変化を検知した際に、路面摩擦係数の低い路面への乗り移りであれば後輪10RL,10RRの制動力又は駆動力を低下させ、路面摩擦係数の高い路面への乗り移りであれば後輪10RL,10RRの制動力又は駆動力を上昇させる後輪制駆動力制御手段1eを備え、この後輪制駆動力制御手段1eは、乗り移り後の路面の路面摩擦係数に対応させた後輪10RL,10RRの制動力又は駆動力の制御態様を少なくとも路面摩擦係数の変化度合いと車輌の走行状態の情報に基づいて変更するように構成すること。
(もっと読む)
ブレーキ制御装置
【課題】ドラムブレーキを搭載した車両において悪路走行時等のブレーキシューの挙動を簡易に抑制し、その周辺部品との摩擦による異音を防止または抑制する。
【解決手段】車両に作用する上下方向加速度が大きいときに、ドラムブレーキのホイールシリンダに予備的な液圧がかけられ、ブレーキシューがシューリターンスプリングの付勢力に抗して拡開方向に動作させられる。これにより、弾性的に支持されたブレーキシューの支持剛性が高くなるとともに、ブレーキシューの摺り上がりまたは摺り下がり方向の摩擦力が大きくなる。その結果、ブレーキシューの摺り上がりおよび摺り下がりが発生し難くなり、バッキングプレートのレッジ面とブレーキシューとの摺動等による異音の発生を防止または抑制できる。一方、ブレーキシューが不必要にブレーキドラムに接触しないようにすることで、ブレーキの引き摺りを防止することもできる。
(もっと読む)
ハウジングおよびハウジングの製造方法
【課題】電気部品とこれを制御するための電子制御ユニットとを収容する合成樹脂製のハウジングであって、射出成形の回数を削減することが可能な構成を具備するハウジングを提供することを課題とする。
【解決手段】電気部品を収容する第一収容室K1および電気部品を制御するための電子制御ユニットを収容する第二収容室K2を備え、第一収容室K1と第二収容室K2とを仕切る仕切部4に電気部品と電子制御ユニットとを電気的に接続するための導体部材6が埋設されている合成樹脂製のハウジング400であって、導体部材6は、電子制御ユニットに至る導線が接続されるターミナル6aを備えており、ターミナル6aが、仕切部4の第一収容室K1側と第二収容室K2側とに露出していることを特徴とする。
(もっと読む)
ブレーキ制御装置及びブレーキ制御方法
【課題】制御モードの切替に際してホイールシリンダ圧の封じ込めを回避する。
【解決手段】制動中における異常検出時に作動流体の供給経路の分離を伴うバックアップ用のブレーキモードに移行する際に、バックアップ用ブレーキモードで使用される液圧源とホイールシリンダとの間に設けられかつバックアップ用ブレーキモードで開弁されるべき開閉弁が、開弁指令に応じて開弁されるように当該開閉弁の出入口間に作用する差圧を当該作動流体供給経路の分離前に緩和する。
(もっと読む)
車両の運転制御装置
【課題】車両の電力の低下時に、できるだけ車両の運動制御の作用効果を低減させずに、運動制御に於いて作動する電動式のアクチュエータ又はモータの消費電力を低減する車両の運動制御装置を提供すること。
【解決手段】本発明の運動制御装置は、車両に於いて使用可能な電力が低いとき、アクチュエータの作動を制御する手段が、車両の運動制御のためのアクチュエータの作動を使用可能な電力が高いときに比べて低い供給電力にて且早い時期にて開始する。また、制動制御用アクチュエータとスロットル制御用アクチュエータを含む場合には、車両に於いて使用可能な電力が低いとき、制動制御用アクチュエータの制御量を使用可能な電力が高いときに比べて小さくする。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両用ブレーキ液圧制御装置において、簡単な構造かつ少ない部品点数で制御基板をケーシングに固定しかつケーシングをブロックに固定する。
【解決手段】車両用ブレーキ液圧制御装置13においては、ケーシング24の隔壁41bに一体的に貫設されたロッド61の一端が制御基板50に固定されているので、制御基板50はロッド61によりケーシング24に固定される。また、ケーシング24の隔壁41bに一体的に貫設されたロッド61の他端がソレノイドブロック21に固定されているので、ケーシング24はロッド61によりソレノイドブロック21に固定される。したがって、ロッド61一つの部材によって制御基板50およびケーシング24をソレノイドブロック21に固定することができる。
(もっと読む)
スリップ判定装置およびスリップ判定方法
【課題】左右の駆動輪のスリップ判定に必要な部品点数を削減すると共にスリップを精度良く判定する。
【解決手段】モータMG2の回転位置検出センサ44の検出値から演算された回転数Nm2と左車輪62bに取り付けられた車輪速センサ64bにより検出された左車輪速Vlとを用いて右車輪速Vrを演算し(S120)、演算された右車輪速Vrを用いて右車輪加速度αrを計算し(S130)、計算された右車輪加速度αrが閾値αrslipを超えているときには右車輪62aにスリップが発生したと判断する(S160,S170)。一方、検出された左車輪速Vlを用いて計算した左車輪加速度αlが閾値αlslipを超えているときには左車輪62bにスリップが発生したと判断する(S140,S150)。
(もっと読む)
エンジンアシスト装置を備えた多軸車両
【課題】エンジンアシスト型の多軸車両において、駆動輪の空転を抑制し加速性能の悪化を防止する。
【解決手段】多数の駆動輪76L,R〜82L,Rの各々が空転しているか否かを判定し、空転していると判定された駆動輪には自動的に制動をかけて空転を抑制する。加えて、アクセル操作が行われたとき、同時に空転していると判定された駆動輪の数を検出して所定の指定数と比較する。同時空転数が所定数より少なければ、エンジン24をアシストする発電電動機22の出力トルクを増やしてエンジン出力トルクを補強させて、駆動輪76L,R〜82L,Rに伝達されるトルクを増大させる。同時空転数が所定数より多ければ、発電電動機22にエンジン24からの出力トルクを吸収させて、駆動輪76L,R〜82L,Rに伝達されるトルクを減少させる。
(もっと読む)
ブレーキ液圧制御装置
【課題】ブレーキ液圧制御装置におけるポンプの昇圧性能を向上させ、またブレーキ液圧制御装置の小型化を図る。
【解決手段】ポンプ51、52は、モータの軸線に対して垂直な方向に往復動するピストンを有するピストンポンプとし、吸入切換弁71、72は、リザーバ41、42に機械的に連動する弁とする。ポンプ51、52の軸線を含み、且つモータの軸線に対して平行な平面をポンプ基準平面としたとき、吸入切換弁71、72を、ポンプ基準平面を横切るように配置することにより、吸入切換弁71、72からポンプ51、52までの吸入経路を短くするとともに、ハウジング90における、モータの軸線およびポンプ51、52の軸線に対して垂直な方向の寸法を小さくする。
(もっと読む)
ブレーキ液圧制御装置
【課題】ブレーキ液圧制御装置の小型化を図る。
【解決手段】減圧弁収容孔H31の軸線を加圧弁収容孔H11の軸線に対してポンプ軸線方向にずらして配置することにより、減圧弁収容孔H31との干渉を避けつつ、加圧弁収容孔H11と増圧弁収容孔H21とを、弁取付面とポンプ収容孔H51との間に位置する直線状の1本の管路124にて連通させる。これにより、ハウジング90におけるモータ収容孔H60の軸線方向の寸法を小さくすることができる。
(もっと読む)
走行制御装置
【課題】トラクション制御終了後に走行制御を自動的に復帰可能としつつも、トラクション制御と走行制御とが干渉してしまうのを防止する。
【解決手段】走行制御装置は、トラクション制御による駆動力制御期間中の駆動トルク最小値を取得し(ステップS5)、トラクション制御が終了したとき、ACCによる駆動トルク制御の上限値を規定する駆動トルク上限値にその駆動トルク最小値を設定する(ステップS7)。
(もっと読む)
車両用走行装置
【課題】車両の最適な走行経路を設定すること。
【解決手段】車両用走行装置10は、車両に搭載され、車両が進行する路面状態を検出する路面状態検出手段1、2と、目標とする目標位置までの走行経路を設定する経路設定手段3と、車両の特性を記憶する車両特性記憶手段4と、を備えている。経路設定手段3は、路面状態検出手段1、2により検出された路面状態と、車両特性記憶手段4により記憶された車両の特性と、に基づいて、走行経路S1、S2を設定する。
(もっと読む)
車両用ブレーキ装置
【課題】ポンプの異常を診断する際に、流路の開閉を行うバルブの作動回数を可及的に低減させて、耐久性の低下を抑制する。
【解決手段】リザーバタンク2aとホイールシリンダ3iとの間に、正方向に回転駆動するときにホイールシリンダ3iの側にフルードを吐出し、逆方向に回転駆動するときにリザーバタンク2aの側にフルードを吐出するギアポンプ5と、一方向に回転駆動するときにホイールシリンダ3iの側にフルードを吐出するプランジャポンプ6と、を並列に介装する。そして、運転者のブレーキ操作がない間に、ギアポンプ5及びプランジャポンプ6間でフルードが還流するように、ギアポンプ5をリザーバタンク2aの側への吐出方向に回転駆動すると共に、プランジャポンプ6をホイールシリンダ3iの側への吐出方向に回転駆動し、夫々の回転状態に基づいて異常を診断することを特徴とする。
(もっと読む)
電動ステアリング制御装置
【課題】車両の旋回中にμスプリット路面でアンチスキッド制御やトラクション制御が作動し、車輪の前後力に左右差が発生する場合において、車両の偏向を抑制し得る電動ステアリング制御装置を提供する。
【解決手段】車両の左右の路面摩擦係数が異なる走行路で、アンチスキッド制御及びトラクション制御のうちの少なくとも一方の制御作動と判定したときの旋回状態に基づいて目標旋回状態量を演算する(M8)。この目標旋回状態量と実際の旋回状態量との偏差、及び前後力差に基づき、カウンタステア追加トルク目標値を演算する(M5)。これをパワーステアリング補助トルク目標値に加算し、電気モータMTを駆動する指令値を決定する。
(もっと読む)
車両状態判定装置、並びに該車両状態判定装置を備えた車両の警報装置及び運動制御装置
【課題】走行路面に対するタイヤとしての特性に従い適切な指標を演算し、その演算結果に基づき車両状態を判定し、その車両状態に応じて適切なタイミングで警報を行い、円滑に車両の安定化制御を行う。
【解決手段】車両状態量検出手段M1の検出車両状態量に基づき、タイヤ横力比演算手段M2にて、走行路面に対するタイヤとしての特性に従い車輪と走行路面間で発生し得る最大横力と車輪に実際に発生している横力との比を「タイヤ横力比」として演算する。限界ヨーレイト演算手段M3にて、タイヤ横力比に基づき車両に発生し得る最大のヨーレイトを演算し限界ヨーレイトとして出力する。検出車両状態量に基づいて目標ヨーレイトを演算し、これと限界ヨーレイトの偏差に基づき、車両の不安定度を表す指標を演算する。
(もっと読む)
車両の制動力制御装置
【課題】適切にLSD制御を実行することによって、スピンなどの発生を抑制することが可能な車両の制動力制御装置を提供する。
【解決手段】上記の車両の制動力制御装置は、左右輪における車輪速度の差が閾値を越えている場合に、車輪速度の差が低減されるように制動力を付与する制御を行う。また、車両の制動力制御装置は、スピンが発生する可能性が高い場合に、制動力の制御に用いる閾値を低い値へ変更する。これにより、左右輪の車輪速度の差が閾値を超える確率が高くなるため、制動力を付与する制御が発動されやすくなる。このような制動力を付与する制御を実行することにより、左右輪における車輪速度の差を低減させることができるため、車両に生じるヨーモーメントを低減することが可能となる。よって、車両に発生し得るスピンなどを適切に抑制することができる。
(もっと読む)
車両用制御装置及び警告出力方法
【課題】初期学習処理が必要な段階に至ってもその初期学習処理が済んでいない場合にのみ的確にその処理の必要性を報知するようにし、不必要な警告出力を防止するとともに、初期学習処理を忘れてしまうような事態を確実に防止できる車両用制御装置を提供する。
【解決手段】車両に装備される特定の制御用機器41についての初期学習処理が未完了の場合でかつ車両が所定の警告条件の運転状態となったとき、所定の警告出力を実行する車両用制御装置10であって、車両の累積走行距離が所定距離に達しないときに所定の警告条件を設定し、車両の累積走行距離が所定距離に達したときにはその所定の警告条件を警告出力を実行する確率が高くなる条件に更新設定する警告条件設定部52を備える。
(もっと読む)
1 - 20 / 160
[ Back to top ]