
Fターム[3D046HH17]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | エンジン状態 (242)
Fターム[3D046HH17]に分類される特許
1 - 20 / 242
車両用トラクション制御装置
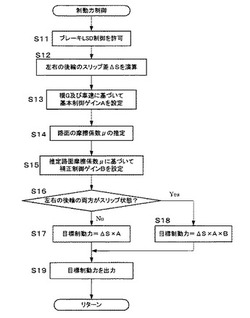
【課題】左右の駆動輪のスリップが交互に大きくなるスリップのハンチングを防止することが可能な車両用トラクション制御装置を提供する。
【解決手段】ディファレンシャル15を介して駆動力が伝達される左右の後輪12L、12Rを有する車両10に適用され、スキッドコントロールコンピュータ30が左右の後輪12L、12Rのうち加速スリップが大きい後輪に対して制動力を付加するトラクション制御装置において、スキッドコントロールコンピュータ30は、左右の後輪12L、12Rの両方がスリップしている場合、加速スリップが大きい後輪に対して付加する制動力を制限する。
(もっと読む)
車両の横転防止装置

【課題】トラクタヘッド側でトレーラのロール角検出が正確に行える連結車両の横転防止装置を提供する。
【解決手段】トラクタのロール角を推定するトラクタロール角推定部(1)と、トラクタとトレーラの連結総重量を推定する連結総重量推定部(2)と、トラクタ及びトレーラを結合するカプラーが受ける荷重を推定する荷重推定部(3)と、該荷重と該連結総重量とトラクタロール角から、トレーラのロール角を推定演算するトレーラロール角推定部(4)と、を備える。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】パーキングロック機構を備えた車両において、車両の停止状態を維持しつつパーキングロック機構によるパーキングロック頻度を向上させる。
【解決手段】ECUは、シフトポジションがPポジションに操作され(S102にてYES)、パーキングロック条件が成立すると(S104にてYES)、パーキングロック制御を実行するステップ(S106)と、パーキングロック制御前にファイナルギヤ機構が前進方向に回転していたか否かを判断するステップ(S108)と、前進方向に回転していたと判断されると(S108にてYES)、モータジェネレータを後進方向に回転させるステップ(S110)と、後進方向に回転していたと判断されると(S108にてNO)、モータジェネレータを前進方向に回転させるステップ(S112)とを含む、プログラムを実行する。
(もっと読む)
車両の制御装置、制御方法、その方法を実現するプログラムおよびそのプログラムを記録した記録媒体
【課題】ブレーキペダルが操作されていなくてもブレーキ力が保持される場合がある車両において、クリープトルクを適切に抑制することにより無駄なエネルギ消費を削減する。
【解決手段】ECUは、クリープトルク反映率を設定するステップ(S108)と、ブレーキがオンされ(S110にてYES)、停車中であると(S112にてYES)、クリープトルク反映率を0に更新するステップ(S114)と、ブレーキがオフされていても(S110にてNO)、ブレーキ油圧が油圧値P(0)より大きいと(S118にてYES)、ブレーキホールド制御中であると判断して(S120)、ブレーキ油圧をパラメータとするマップに基づいて、クリープトルク反映率を低減して更新するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
車両およびその制御方法
【課題】駆動系の起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制する。
【解決手段】パワースイッチからプッシュ信号が入力されてから所定時間tlat1が経過する前にシフトポジションが走行ポジションにシフト操作されたときには、シフト操作されないときの所定時間tlat1よりも長い所定時間tlat2が経過するまで起動指示フラグFに値1を設定し続ける即ち起動指示を行ない続ける。これにより、シフトポジションが走行ポジションにシフト操作された後に再び非走行ポジションにシフト操作されたときに起動処理実行条件が成立する可能性を高くすることができる。この結果、起動処理を実行するために運転者が煩雑な操作を行なわなければならなくなるのを抑制することができる。
(もっと読む)
車両用駆動力制御装置
【課題】検出対象の位置検出精度の問題で良好な駆動力制御が妨げられることを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の先方の環境を検出し、前記環境に適した駆動力制御を行う車両用駆動力制御装置であって、道路上又は道路周辺の印の情報を予め記憶する記憶手段と、前記印を検出する手段と、前記検出された印に基づいて車両と前記環境との距離情報を求める手段(S40)と、前記距離情報に基づいて、駆動力制御を行う(S70)。
(もっと読む)
車両の制動装置
【課題】制動時における車室内の快適性を向上できる制動装置を提供する。
【解決手段】ブレーキペダルの操作量に応じた制動力を発生するポンプ8を備えた車両の制動装置である。所定条件下、ポンプ8の作動による制動力の変化速度を、車体速度やエンジン回転数に応じて変更し、当該車体速度若しくはエンジン回転数が低い程、当該変化速度を小さく抑える。
(もっと読む)
車両用駆動力制御装置
【課題】車両前方の道路環境に対応して、車両に減速度を作用させる車両用駆動力制御装置であって、運転者の減速意図が検出された地点に近いところで減速制御が開始されることが可能な車両用駆動力制御装置を提供する。
【解決手段】車両前方の道路環境を検出する手段と、前記道路環境に対して予め設定された特定領域内に車両がいるか否かを判断する手段(S005)と、運転者による減速意図が検出されたときに前記道路環境に対して適切な車両走行状態となるための減速度を作用させる手段と、運転者が前記減速意図を示したときの車両位置が前記特定領域の外である場合に、前記特定領域を拡大する手段(S008)とを備えている。
(もっと読む)
車両の制御装置
【課題】エンジン始動時におけるドライバーの混乱を防止することができる車両の制御装置を提供する。
【解決手段】エンジン3を一時停止させる自動停止制御部14と、一時停止中に再始動操作がなされたとき制動手段5を継続して作動させる制動力保持部16と、エンジン3を再始動させる再始動制御部17とを備えた車両2の制御装置1において、上記車両2のトランスミッション4を制御するための変速制御部12と、上記再始動制御部17により上記エンジン3が再始動された際に、上記変速制御部12により上記トランスミッション4が発進段にギヤインされたときは、上記制動力保持部16による上記制動手段5の作動を解除し、他方、上記トランスミッション4が失陥して発進段にギヤインできなかったときは、手動による制動操作が行われるまで待機した後、上記制動力保持部16による上記制動手段5の作動を解除する制動力保持解除部18とを備えたものである。
(もっと読む)
車両の制御装置
【課題】ブレーキホールド制御実施中にニュートラル制御を実施している状況から、発進要求に応じてニュートラル制御からの復帰を行うときに、そのニュートラル制御の復帰時のショックを抑制する。
【解決手段】ニュートラル制御からの復帰時に、運転者のアクセルペダル踏み込み量に関係なく、スロットルバルブを、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに開いて、エンジントルクの早期上昇を抑制する(ステップST4)。また、ブレーキ圧についても、ニュートラル制御からの復帰開始時から所定時間遅延した後に緩やかに解放する(ステップST5〜ST8)。このようにして、ニュートラル制御からの復帰時の環境(スロットル開度、ブレーキ力)を、前進クラッチの係合を考慮して適正に設定することで、ニュートラル制御からの復帰時のショックを抑制することができる。
(もっと読む)
発車時事故防止装置及び発車時事故防止方法
【課題】停車の際の車両の進行方向と同じ方向に発車させることができない停車場所から、その発車させることができない方向に発車することで生じる事故を未然に防止する。
【解決手段】停車時進行方向判定部20は、車両が停車する際の前後進の別(停車時進行方向)を判定し、停車時進行方向記憶部30がその判定結果を記憶する。一方、発車時進行方向判定部40は、発車の際の前後進の別(発車時進行方向)を判定するとともに、その発車時進行方向と、停車時進行方向記憶部30に記憶された停車時進行方向とを比較する。両者が一致すれば、発車時進行方向は安全な方向でないと判定し、この場合、警報部50がその旨を警報するとともに、車両制御部60が、車両の進行を禁止する制御を実行して、事故を未然に防止する。
(もっと読む)
車両、車両の制御装置および車両の制御方法
【課題】駆動装置の保護と駆動要求の達成とが両立された車両を提供する。
【解決手段】車両1は、車輪38に駆動力を与える駆動装置11と、車輪38に制動力を与える制動装置88と、駆動装置11と制動装置88を制御する制御装置50とを備える。制御装置50は、車両1の進行方向と駆動力の作用する方向が逆方向である場合に、駆動力要求(Acc)どおりの駆動力を駆動装置11で発生させても駆動装置11が動作禁止領域で動作しないときには、駆動力要求(Acc)どおりの駆動力を駆動装置11で発生させる。制御装置は、駆動力要求(Acc)どおりの駆動力を駆動装置で発生させると駆動装置が動作禁止領域で動作するときには、駆動力要求(Acc)に応じて制動装置88を作動させる。
(もっと読む)
車両制御装置
【課題】車両制御装置において、アイドル運転状態で停止している際に、エアコン等の操作により、エンジントルクが増加した場合においても、クリープ現象による車両の移動の抑制を可能にする。
【解決手段】オートマチックトランスミッションを搭載した車両において、アイドル運転状態で且つオートマチックトランスミッションのレンジがニュートラルレンジまたはパーキングレンジ以外のレンジで停止している場合に、エアコンを作動させる等により、エンジン負荷を大きくさせるような操作を行うと、エンジントルクを増加させる前にブレーキの制動力をアシストする制御を実行することで、運転者の意に反して車両が動き出すことを抑制することができる。
(もっと読む)
車両制御装置
【課題】アクセル操作とブレーキ操作を1つのペダルで兼用する車両制御装置において、従来よりも車速制御をしやすくすること。
【解決手段】ペダル40の踏み込み量によって車速を制御する速度制御部100を設ける。この速度制御部100は、ペダル40が速度制御踏み込み範囲内で踏み込まれたときは車速を減速させ、速度制御踏み込み範囲内でペダル40が戻されたときは車速を加速させる。また、ペダル40が速度制御踏み込み範囲よりも深い制動範囲まで踏み込まれたときは、その踏み込み量に応じた制動力で車両を制動させる。ペダル40の踏み込み量の大小によって車速を制御することができるので、速度制御がしやすくなる。しかも、速度制御踏み込み範囲を超えてさらに深い範囲まで十分に踏み込むことにより急ブレーキをかけることも可能となる。
(もっと読む)
制動制御装置
【課題】後方衝突時における二次的事故の発生を防止しかつ自車両に加わる衝撃を軽減する制動制御装置を提供する。
【解決手段】車両の車輪に設けられたブレーキ装置10の制動力を制御する制動制御装置を、車両の衝突を検出する衝突検出手段41と、車両の前後方向における加速度を検出する加速度検出手段43とを備え、衝突検出手段41が衝突を検出した後、加速度検出手段43が検出した加速度が所定の閾値を下回った場合にブレーキ装置10に制動力を発生させる構成とする。
(もっと読む)
車両用走行支援装置
【課題】車両制動を迅速に行うこと。
【解決手段】車両用走行支援装置10は、運転者の状態を検出する運転者状態検出手段2aと、運転者状態検出手段2aにより検出された運転者の状態に基づいて、運転者の運転に対する集中度を推定する運転集中度推定手段2と、運転集中度推定手段2により推定された運転者の集中度が高い状態よりも、運転者の集中度が低い状態の方が、運転者の制動操作に対する車両の減速度の立ち上がりをより大きくするような制動準備を行う制動準備手段1と、を備えている。
(もっと読む)
車両用制動力制御装置
【課題】車両の停止状態を適切に保持しつつ、据切り時に必要な操舵力を抑制することが可能な車両用制動力制御装置を提供すること。
【解決手段】車両の停止状態を検出する停止状態検出手段と、車輪の回転を制動する制動手段と、車輪に操舵力が出力されているか否かを判定する操舵力判定手段と、を備え、停止状態検出手段により車両が停止状態であることが検出され、制動手段が作動し、且つ操舵力判定手段により車輪に操舵力が出力されていると判定された場合に、車輪のうち少なくとも操舵力が伝達される操舵輪に対する制動力を小さく変更するように制動手段を制御する所定制動力軽減制御を行なう車両用制動力制御装置であって、乗員の制動意思を検知する制動意思検知手段を備え、所定制動力軽減制御を行なっている最中に制動意思検知手段により乗員の制動意思が検知された場合に、制動力を大きく変更するように前記制動手段を制御することを特徴とする。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】ヒルホールド機能を備えるとともに、安全性をより向上した電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、少なくとも車両の速度変化に基づいて路面の傾斜を判定する傾斜判定部41cと、傾斜判定部41cが判定した路面の傾斜に応じて、パーキングブレーキ10の制動力を、平地用制動力よりも大きい傾斜路用制動力に設定するとともに、傾斜路用制動力による制動の解除後であって、所定の車速条件を充足する前に車両が停止した場合は、この車速条件が充足した場合よりも緩和された条件において傾斜路用制動力を設定する制動力設定部41とを備える構成とする。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】坂道での停車後、早期に路面傾斜度に応じた電動パーキングブレーキの作動を行うとともに、車両の動き出しを確実に防止できる電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、車両の走行中にその走行状態に基づいて推定される動的推定路面傾斜度と、車両の停車後に車両に作用する加速度に基づいて推定される静的推定路面傾斜度とをそれぞれ求め、車両の停止後、静的推定路面傾斜度が動的推定路面傾斜度よりも大きい場合にパーキングブレーキ10の制動力を動的推定路面傾斜度に基づいて設定される制動力よりも増加させる構成とする。
(もっと読む)
操舵制御装置、及び操舵制御方法
【課題】車両旋回力の低下を防止し、高い操舵性能を確保することのできる操舵制御装
置を提供すること。
【解決手段】ステアリング1の操舵状態に基づいて、車両の旋回目標値を算出する旋回
目標値算出手段と、アシストモータ5が作動することによって得られる操舵補助力、及び
ブレーキアクチュエータ36FR、36FL、36RR、36RLが作動することによっ
て得られる車両の制動力を制御することによって、旋回目標値を達成する旋回制御手段と
を装備する。
(もっと読む)
1 - 20 / 242
[ Back to top ]