
Fターム[3D046HH26]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903) | 車体前後方向 (371)
Fターム[3D046HH26]に分類される特許
361 - 371 / 371
車両用内輪空転防止制御装置

【課題】 フィードバック制御に伴う過渡応答や振動等を発生させることなく、旋回内輪空転を未然に防ぐことができる車両用内輪空転防止制御装置を提供する。
【解決手段】 ブレーキペダルの操作とは独立して各車輪のブレーキ液圧を可変するブレーキアクチュエータ6と、ステアリングギア比を可変する前輪操舵アクチュエータ5と、を備えた車両用内輪空転防止制御装置において、内輪が空転するかどうかを予測する内輪空転判断手段と、内輪が空転すると判断されたとき、ブレーキアクチュエータ7に対し、各車輪のブレーキ圧を増大させるブレーキ液圧指令値を出力するとともに、前輪操舵アクチュエータ5に対し、ステアリングギア比をより大きくするギア比可変指令値を出力する内輪空転防止制御手段と、を設けた。
(もっと読む)
車輌用走行制御装置

【課題】追従走行制御に於いて、先行車輌の停止に伴い自車を停止させる際に自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりすることを防止する。
【解決手段】先行車輌が停止していない場合(S100)及び先行車輌が停止していても自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには(S140)、車間距離制御が実行され、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御されるが(S170)、予測時間Taが基準値Tao以下になると運転者に対し制駆動操作を催促する報知が発せられた状態で車間距離制御が実行され(S150、170)、運転者は自らの判断により制駆動操作を行うことにより自車を所望の位置に停止させることができ(S20、210)、自車が停止不可区域にて停止する虞れがあるときにも報知が発せられる(S80、150)。
(もっと読む)
車体加速度センサの故障診断装置、アンチロック・ブレーキ・システム
車両に搭載され、車両の走行中に車両の走行状態に応じて出力が変化するセンサ、特に車両の車体加速度を検出する車体加速度センサの故障診断による車両用アンチロック・ブレーキ・システムの制御処理負荷を低減させる。車両速度が既定速度γ(4m/s)以上になった時点から(符号T1で示したタイミング)、車体加速度センサ1の出力値の最大値Gmax、及び最小値Gminの記憶・更新が開始され、最大値Gmaxと最小値Gminとの差、つまり、車体加速度センサ1の出力値の変動幅が既定変動幅δ以上になったか否かの判定が行われるようになる。そして、車体加速度センサ1の出力値の変動幅が既定変動幅δ以上になった時点で車体加速度センサ1の出力固着故障検出停止フラグがOFFからONになり、車体加速度センサ1の出力固着故障の検出が行われなくなる(符号T2で示したタイミング)。 (もっと読む)
追突防止装置
【課題】前車との追突の可能性が高い危険状態を検知した場合、すぐにブレーキを動作させ追突の可能性を抑制できる追突防止装置を提供すること。
【解決手段】本発明に係る追突防止装置は、パニックブレーキを検知する検知手段と、前記パニックブレーキ検知手段がパニックブレーキであることを検知した場合に、LEDを用いてパニックブレーキ信号を送信するパニックブレーキ信号の送信手段と、前記信号の受信してブレーキを制御するパニックブレーキ信号の受信手段とを備えることによって、人間が前車両との危険を察知してブレーキを踏むよりも早く、確実にブレーキを動作させることができ、効果的に追突事故を抑制することができる。
(もっと読む)
制動プロセスを実行する方法及び装置
本発明は、制動プロセスを実行する方法及び装置に関する。本発明によれば、所望車両減速度(zsoll)を示す減速度変数(zsoll)は、制動プロセス中の車両の運転状態が第1の状態条件と一致すると低減され、車両の運転状態が第2の状態条件と一致すると増大される。第1の状態条件及び/又は第2の状態条件は、フロントサスペンション圧縮行程(sVA)及び/又はリヤサスペンション圧縮行程(sHA)によって決まる。  (もっと読む)
(もっと読む)
車両ヨー軸回りの車両の回転中心を求める装置
ヨーレートと横滑り角とに依存して車両ヨー軸回りの車両の回転中心を求める装置を提供する。  (もっと読む)
(もっと読む)
自動車において障害物までの距離を検出する装置及び方法
本発明は、距離センサ(1〜6)及び制御ユニット(10)を有する、障害物(8、8’)からの自動車(7)の距離(A)を検出する装置(15)に関する。本発明の装置は、制御ユニット(10)が動的車両データを使用して自動車(7)がもうすぐ至る運転経路(11)の計算に適合されることを特徴とする。制御ユニット(10)はまた運転経路(11)内にある関係のある障害物(8’)と運転経路(11)の外部にある無関係な障害物(8)とを区別するのに適している。本発明はまた障害物(8、8’)からの自動車(7)の距離(A)を検出する方法に関する。
 (もっと読む)
(もっと読む)
プリセーフシステムを装備した自動車
本発明は、自動車の少なくとも1つの周囲認識装置(4)及び運転状況データ検出装置(5)によって受信された情報に従って作動されるアクティブ及び/又はパッシブセーフティ装置(13、14)を備え、前記情報はデータ評価装置(10)によって分析される、プリセーフシステム(2)を装備した自動車(1)に関する。アクティブ及び/又はパッシブセーフティ装置(13、14)の少なくとも1つの要素は、自動車の周囲認識装置(4)の情報が潜在的な衝突物を示すと、及び運転状況データ入力装置(5)が衝突が妥当であると判断すると作動される。  (もっと読む)
(もっと読む)
駐車操作中に運転者を支援するための方法
本発明は、例えば、駐車操作又は位置決め操作のような運転操作中に車両(10)の運転者を支援するための方法に関する。前記方法によれば、車両(10)を移動させるための基準軌道(16)が決定される。基準軌道(16)に沿って車両を案内するために適用すべきハンドル位置は、運転操作中に運転者に指示される。運転者が適用する実際のかじ取り角と、要求されたハンドル位置に対応する目標かじ取り角との間のかじ取り角偏差は、運転者とは独立して補正される。 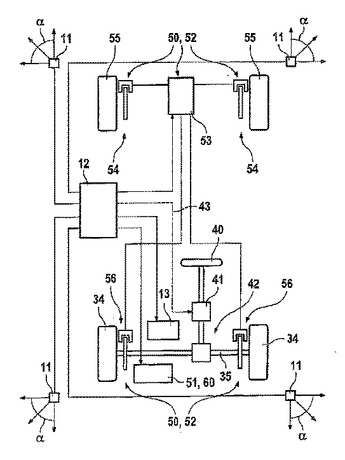 (もっと読む)
(もっと読む)
車輌の制動制御装置
【課題】前後輪制動力配分制御中にアンチスキッド制御が行われる場合に後輪の制動圧が不必要に高くなることを防止して車輌の走行安定性を向上させる。
【解決手段】車速V及び車輌の減速度Gxbに基づき後輪の保持圧力Pcが演算され(S50〜70)、前後輪の制動力配分制御の開始条件が成立すると(S60、70)、マスタシリンダ圧力Pmと後輪の保持圧力Pcとの偏差Pm−Pcに基づき前輪の制動圧の増加圧力ΔPfが演算され(S150、160)、前輪の制動圧がマスタシリンダ圧力Pmと増加圧力ΔPfとの和になるよう制御され(S170)、後輪の制動圧が保持圧力Pcになるよう制御される(S190)、前後輪制動力配分制御中にアンチスキッド制御が開始されると(S90)、前輪の制動圧の増加圧力ΔPfが漸減され(S100、130)、後輪の制動圧の保持圧力Pcが漸増される(S180、200)。
(もっと読む)
ブレーキ制御方法及び装置
【課題】 運転者の意図に反することなく車両停止を継続可能なブレーキ制御方法及び装置を提供する。
【解決手段】 ブレーキペダルの操作量変化を検出し(ステップS1)、検出した操作量fとその時間変化df/dtを基にして運転者の操作状態が発進操作か否かを判定する工程(ステップS3)と、発進操作でないと判定した場合は、停止を維持するのに必要な制動力を求め(ステップS5)、現在の制動力(ステップS4で演算)がこれに不足している場合(ステップS6でYESと判定した場合)にはブレーキシステムを制御して制動力を増加せしめて停止を維持するのに必要な制動力を確保する工程(ステップS7、8)と、を備えている。
(もっと読む)
361 - 371 / 371
[ Back to top ]