
Fターム[3D046HH26]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903) | 車体前後方向 (371)
Fターム[3D046HH26]に分類される特許
201 - 220 / 371
車両の走行制御装置
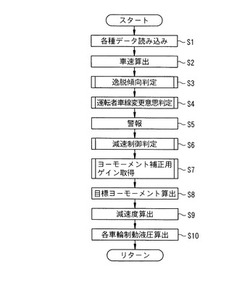
【課題】自車両が逸脱傾向になることでレーダ検出範囲外になり、ACCで自車レーンの前方を走行する先行車両を追従対象車両として認識しなくなっても、逸脱防止完了後に、当該先行車両を追従対象車両として再度、確実に認識できる。
【解決手段】車両の走行制御装置は、レーダ16が検出する自車レーンの前方を走行する先行車両の走行状態情報を記憶するとともに、レーダ16で先行車両を検出できなくなった場合、前記記憶した走行状態情報に基づいて、当該先行車両の走行状態を予測し(ステップS7)、その予測した先行車両の走行状態に基づいて、当該先行車両を検出できるよう、自車両が走行車線から逸脱しないように自車両に付与する目標ヨーモーメントを算出する(ステップS8)。
(もっと読む)
トラクション制御装置

【課題】 エンスト傾向にある場合にトラクション制御に入ってしまうことで、エンストが起こることが的確に判定できなくなることを防止する。
【解決手段】 エンスト傾向にある場合にはトラクション制御が開始されないように、エンスト傾向でないことをトラクション制御開始条件とする。また、トラクション制御開始後にも、エンスト傾向にあることを的確に判定できるように、エンスト傾向にあるか否かの判定に用いるエンジン回転数のしきい値を車両状態に応じて変更する。これにより、エンジン回転数のしきい値を一定値(所定回転数)とした場合と比べて、エンスト傾向を的確に検出することが可能となる。これにより、エンストが起こる可能性が低いときにまで頻繁にトラクション制御開始が禁止されることを防止することが可能となる。
(もっと読む)
車両の制御装置
【課題】 追随制御による走行中にエンジンブレーキが作用しない或いは低減するような変速状態に切り換えられた場合でも乗員に対して違和感を生じさせることなく円滑に走行し得る車両の制御装置を提供する。
【解決手段】 変速状態をエンジンブレーキが作用する変速状態で保持する変速規制モードに設定可能な変速制御手段と、先行車両との車間距離を測定する先行車両検出手段と、車間距離を予め設定された目標距離になるように走行装置を制御する車間制御手段とを備える。ACC制御中であって、変速規制モードではエンジンブレーキが作用してこの変速規制モードが解除されるとエンジンブレーキの作用が低減し或いは無くなるような走行状態での走行中に、変速規制モードの解除操作があった場合に、変速制御手段におけるモード解除の実行を入力操作から所定時間遅延させるとともに、この遅延期間中に車間距離を増大させる補正手段が設けられている。
(もっと読む)
車両用ブレーキ装置
【課題】パーキングブレーキを運転者の誤ったアクセル操作によって解除してしまったときに、直ちにパーキングブレーキを復旧させる。
【解決手段】運転者のアクセル操作を検知してパーキングブレーキを解除した場合、運転者のアクセル操作が誤操作であるか否かを判定し(ステップS9、S16、S18)、誤操作であると判定したら、再びパーキングブレーキを発生させる(ステップS11、S5)。具体的には、アクセル増加速度が所定値以上となるとき(ステップS9の判定が“No”)、またアクセル減少速度が所定値以上となるとき(ステップS16の判定が“No”)、さらにアクセル操作が開始されてから終了するまでの時間Tが設定時間TSETよりも短いときに(ステップS18の判定が“No”)、運転者のアクセル操作が誤操作であると判定する。
(もっと読む)
車両の制御装置
【課題】 衝突予知の誤判断によって乗員が違和感を受けるのを防止しつつ、衝突時にブレーキ装置を適正に作動させることができるようにする。
【解決手段】 自車両の前方に存在する前方物体と自車両との距離および相対速度を検出する前方物体検出手段9と、この前方物体検出手段9の検出結果に基づいて上記前方物体と自車両とが衝突する状態にあることが予知されたときに、衝突が発生すると予知された衝突予知時点よりも前にブレーキ装置5を作動させる制御を実行する衝突予知制御手段2と、自車両の走行速度を検出する車速検出手段(車速センサ6)と、この車速検出手段により検出された自車両の走行速度が大きい場合には走行速度が小さい場合に比べてブレーキ装置の作動タイミングを遅らせるように上記ブレーキ装置5の制御条件を補正する制御条件補正手段3とを設けた。
(もっと読む)
挙動安定化装置の制御装置
【課題】 車両においてヨーレートセンサの加速度感度誤差に合わせ、快適性を損なうことなく挙動安定化制御を実行させる。
【解決手段】 VSC制御の実行頻度を規定する閾値Thvscを決定するために閾値設定処理が実行される。同処理が実行される過程で、前後加速度の絶対値|Gx|が、閾値Thgよりも大きいか否かが判別され、閾値Thg以下である場合には通常通りの閾値Thvsc1が閾値Thvscとして設定される。一方、|Gx|が閾値Thgよりも大きい場合には、基本的に閾値Thvsc2が閾値Thvscとして設定される。この際、絶対値|Gx|が閾値Thgより大きい場合であっても、ヨーレートセンサ15によって検出されたヨーレートYRを前後加速度Gxで除算した値の絶対値である感度誤差指標値|YR/Gx|が閾値Thy以下である場合には、閾値Thvsc1が閾値Thvscとして設定される。
(もっと読む)
左右独立駆動車両
【課題】 路面凹凸や路面摩擦係数の変化に対してロバストな車両挙動を実現できる左右独立駆動車両を提供する。
【解決手段】 車両の左右にそれぞれ配置され、モータで車両の制駆動力を独立に調整する後輪と、運転者からの旋回要求(横加速度目標値tYG)に従い、後輪の旋回外側駆動力を旋回内側の駆動力よりも大きな値に制御する駆動力制御手段(ステップS312)と、後輪と別に設けられ、操舵機構により転舵可能な前輪と、後輪のみにより実現される車両の旋回挙動に基づいて、前輪左右中央位置での目標車体横滑り角βaを算出する目標車体横滑り角算出手段(ステップS310)と、前輪の転舵角δfを目標車体横滑り角βaに一致させる転舵角調整手段(ステップS311)と、を備える。
(もっと読む)
車両のロール特性推定装置、及び該装置を用いた車両のローリング運動安定化制御装置
【課題】 車両のロール増大傾向の現われ易さを示す指標を、サスペンション制御装置の作動状況を考慮して、精度よく推定し、ローリング運動の安定化制御を適切に行なう。
【解決手段】 サスペンション特性を調整可能なサスペンション制御装置SCMを備え、ローリング運動検出手段M1が検出する実ローリング運動と、横加速度検出手段M2が検出する横加速度及びサスペンション特性取得手段M0が取得するサスペンション特性に基づきローリング運動推定手段M3にて演算する推定ローリング運動との比較結果に応じて、車両のロール増大傾向の現われ易さを示す指標を推定する。この指標に応じて設定するロール増大傾向判定基準に基づき、制動力制御及び駆動力制御のうち少なくとも一方の制御を行なう。
(もっと読む)
車両運動安定化制御装置
【課題】 単一の一軸の角速度検出手段によってヨーイング運動及びローリング運動の両者における車両安定性を向上させ得る車両運動安定化制御装置を提供する。
【解決手段】 車両の上下方向軸に対して前後方向に傾斜した軸回りの角速度を検出する一軸の角速度検出手段M0と、その検出角速度に基づいて実運動状態量を演算する実運動状態量演算手段M1と、車両の目標運動状態量を設定する目標運動状態量設定手段M2を備える。運動状態量偏差演算手段M3にて、目標運動状態量と実運動状態量との偏差を演算し、この偏差に基づき、制御手段M4によって車両の制動力及び駆動力のうち少なくとも一方を制御する。
(もっと読む)
車両走行状態判別装置および車両走行状態判別方法
【課題】 砂地走行状態と牽引走行状態とを精度よく判別することができる車両走行状態判別装置および車両走行状態判別方法の提供。
【解決手段】 車両1は、車輪FR〜RLのスリップ率に基づいて制動力を付与するためのブレーキ圧を増減させるECU100を備え、ECU100は、車両1の走行路が砂地路であるか否かを判定する走行路判定部105を備える。走行路判定部105は、車両1が砂地路を走行している状態にあると判断した後、車両1の減速中あるいは高速走行中に、車両1が砂地走行状態にあるか、または牽引走行状態にあるかを再判定する。
(もっと読む)
車両重量推定装置
【課題】車両重量を、制動トルク指令値と、これを与えた時における車体減速度との関係から推定する時の推定精度を、温度変化に影響されることなしに高く保つ。
【解決手段】S11で制動中と判定し、S12で回生制動のみによる制動中と判定する間、S13で、回生制動トルク指令値Tmcom(制動トルク指令値Tdcomに同じ)、および、その指令時に発生した車体減速度αvを蓄積し、S14でその蓄積回数Nが必要最低回数Nmin以上になったと判定するとき、S15で、Tdcom(=Tmcom)およびαvの履歴データ群を直線回帰して、Tdcom(=Tmcom)に対するαvの変化特性αv=A・Tdcom+Bを表す回帰直線を求め、S16で、回帰直線の勾配Aおよびタイヤ有効半径Rを基に車両重量M=A/Rを求めて推定する。上記データが回生制動のみによる制動中のものであるから、温度変化による影響を受けることがなく車両重量の推定を高精度に行うことができる。
(もっと読む)
車両のロール特性推定装置、及び該装置を用いた車両のローリング運動安定化制御装置
【課題】 車両のロール増大傾向の現われ易さを示す指標として、ロール指標を精度よく推定する。また、ローリング運動の安定化制御を適切に行なう。
【解決手段】 ローリング運動検出手段M1が検出する実ローリング運動と、横加速度検出手段M2が検出する横加速度に基づきローリング運動推定手段M3にて演算する推定ローリング運動との比較結果に応じて、ロール指標推定手段M4にて、車両のロール増大傾向の現われ易さを示すロール指標を推定する。このロール指標に応じて設定するロール増大傾向判定基準に基づき、制動力制御及び駆動力制御のうち少なくとも一方の制御を行なう。
(もっと読む)
車間距離制御装置
【課題】 車両の燃料消費率を改善すること。
【解決手段】 車間距離制御装置1は、先行車両と自車両との間の車間距離を検出する車間距離検出手段9と、先行車両の自車両に対する相対速度を算出する相対速度算出手段7aと、先行車両と自車両との目標車間距離の設定を行う目標車間距離設定手段7bと、車間距離Lと、相対速度Vrと、目標車間距離S1と、に基づいて自車両の目標加減速度を設定する目標加減速度設定手段7dと、目標加減速度設定手段7dにより設定された目標加減速度Gに基づいて、自車両の加減速度を制御する加減速度制御手段7eと、を備えている。目標加減速度設定手段7dにより設定される目標加減速度Gが収束傾向にあり、且つ前記車間距離検出手段9により検出された車間距離Lが、解除車間距離設定手段7fにより設定された解除車間距離S3以上のとき、加減速度制御手段7eは加減速度の制御を終了する。
(もっと読む)
追従走行制御装置および追従走行制御方法
【課題】 ドライバーの意図に応じた適切な追従走行制御を可能とする追従走行制御装置および追従走行制御方法の提供。
【解決手段】 先行車両との車間距離や先行車両との相対速度等に基づいて自車両の目標加減速度を設定する追従走行制御装置では、先行車両の制動灯が点灯したと判断されると(S200のYes)、自車両のドライバーの視点が検出され(S202)、ドライバーが先行車両の制動灯を注視しているか否か判定される(S204,S206)。ドライバーが先行車両の制動灯を注視していると判断され(S206のYes)、かつ、ドライバーがブレーキ操作を行ったと判断された場合(S208のYes)、ドライバーの要求制動力に応じて目標制御量の補正量が算出され(S210)、追従走行時用の加減速度マップが適宜更新される(S218)。
(もっと読む)
競技走行における最適制動制御方法及び競技走行における最適制動制御用コンピュータプログラム、並びに競技走行における最適制動制御装置
【課題】タイヤ性能を、より確実に引き出すこと。
【解決手段】レース前の車両の走行状態の情報である競技前走行状態情報を取得し(ステップST1)、ニューラルネットワークを構成して記憶する(ステップST2)。また、現在のレース時の走行状態である競技時走行状態情報を取得する(ステップST5)。また、競技前走行状態情報はニューラルネットワークを構成しているので、競技前走行状態情報より、サーキットを最速のLAPタイムで走行した場合の走行状態である最速LAP時走行状態情報を導出する(ステップST9)。この最速LAP時走行状態情報と、競技時走行状態情報とより、最速LAP時制動タイミングを導出する(ステップST10)。これにより、この最速LAP時制動タイミングで制動でき、タイヤの摩擦力を、なるべく多く引き出して走行することができる。この結果、タイヤ性能を、より確実に引き出すことができる。
(もっと読む)
車両の制動制御装置
【課題】 車両の制動力を保持して停止状態を維持する場合に、液圧式ブレーキ装置に過大な負荷がかかることを防止しつつ、停止状態を確実に維持する。
【解決手段】 ブレーキ液圧を保持して制動力を保持する第1の制動力保持手段(ステップS101,S102)と、パーキングブレーキにより制動力を保持する第2の制動力保持手段(ステップS109)とを備えた車両の制動制御装置において、車両の位置している路面状態を検出する路面状態検出手段(ステップS103,104)と、第1の制動力保持手段により制動力が保持された状態で、路面状態検出手段により検出された路面状態が、予め定められた所定の条件を満たす状態である場合に、第2の制動力保持手段による制動力の保持を禁止する制動力切替禁止手段(ステップS104,105)とを備えている。
(もっと読む)
車両駆動制御システム
【課題】 路面とタイヤとの間で生じた摩擦力の変化を高い精度で検出することができ、車両の安定性回復のための車両制御を直ちに行うことができる車両駆動制御システムを提供する。
【解決手段】 複数の回転機構部500のそれぞれに設けられ、回転に伴って回転軸に対して垂直方向に発生する第1加速度を検出しその検出結果をディジタル値に変換してそのディジタル値を含むディジタル情報を送信するセンサユニット100と、センサユニット100から送信されたディジタル情報を受信して各センサユニット100毎に前記第1加速度の検出結果を取得してスタビリティ制御ユニット700に出力するモニタ装置200と、各センサユニット100のうち最初に所定値以上の第1加速度を検出したセンサユニット100の第1加速度に基づいて車両走行を安定させるようにサブスロットルアクチュエータ412やブレーキ駆動用アクチュエータ640の駆動を補正制御するスタビリティ制御ユニット700を備える。
(もっと読む)
エコラン制御方法及びエコラン制御装置
【課題】坂路状態でのアイドリングストップ時に、車両自体の状況に応じて必要なときのみ制動力を確保するための手段を動作させることができるエコラン制御装置を提供する。
【解決手段】エンジンの動作中、所定のエコラン条件が成立した場合、路面勾配を検出した後、停車状態を維持するために必要なブレーキマスタシリンダ圧(A)及びブレーキブースタ負圧(B)を求める(ステップ101〜103)。次に、これらの値(A)、(B)と実際の車両のブレーキマスタシリンダ圧及びブレーキブースタ負圧を比較することにより、停車状態を維持できるか判定し、満足している場合、アイドリングストップを実施する(ステップ104、105)。一方、満足していない場合、パーキングブレーキを作動させた後、アイドリングストップを実施する(ステップ111、112)。
(もっと読む)
車両の制御装置
【課題】 ダウンシフトが行なわれなくても、運転者の意図通りに減速する。
【解決手段】 VSC_ECUは、運転者のシフト操作に基づいて変速が行なわれるマニュアルモードが選択され(S100にてYES)、アクセルオフである場合(S102にてYES)、ホイールシリンダの油圧を増大し、車輪のブレーキ力を増大するステップ(S104)を含む、プログラムを実行する。
(もっと読む)
車両用操舵装置
【課題】 簡素な構成にて、高い信頼性を確保することのできるステアバイワイヤ式の車両用操舵装置を提供すること。
【解決手段】 車両1は、各車輪3から機械的に分離されたステアリング10に入力されるステアリング操作に応じて車両1のヨーモーメントを制御するステアバイワイヤ式の車両用操舵装置11を備える。各車輪3は、その舵角の変更が不能に設けられ、車両用操舵装置11は、各車輪3に対する駆動力分配を可変可能な駆動力分配装置12と、及び該各車輪3における制動力を各車輪3毎に制御可能な制動力制御装置13とを有して構成される。そして、車両用操舵装置11は、各車輪3に伝達される駆動力、及び該各車輪3における制動力を該各車輪3毎に制御することにより、車両1のヨーモーメントを制御する。
(もっと読む)
201 - 220 / 371
[ Back to top ]