
Fターム[3D046HH41]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車輪状態 (1,034) | 複数車輪の回転差 (29)
Fターム[3D046HH41]の下位に属するFターム
Fターム[3D046HH41]に分類される特許
1 - 14 / 14
四輪駆動車の制御装置
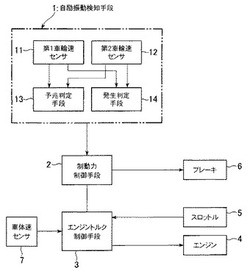
【課題】四輪駆動を維持したまま、四輪駆動車の副駆動輪への駆動力伝達系の自励振動の発生防止又は抑制を図ることができる四輪駆動車の制御装置の提供。
【解決手段】エンジンの駆動力を車輪に伝達する駆動力伝達系の自励振動を制御する四輪駆動車の制御装置であって、自励振動の発生又は発生の予兆を検知する自励振動検知手段1と、自励振動検知手段1によって自励振動の発生又は発生の予兆が検知された場合に、ブレーキペダル操作と独立に、四輪駆動車の主駆動輪及び/又は副駆動輪に所定の制動力を作用させる制動力制御手段2とを備える。
(もっと読む)
異径車輪の判定方法及びその判定装置

【課題】車両に装着されている車輪のうち異径のものを判定する異径車輪の判定方法及びその判定装置を提供する。
【解決手段】四輪の車輪(T)が装着されている車両(c)の四輪のうち異径の車輪(T)を判定する異径車輪の判定装置(10)において、四輪のそれぞれの車輪(T)について車輪速度(ωi)を検出する車輪速度検出部(20)と、四輪の車輪(T)の中から択一的に選択された基準車輪(T0)の車輪速度(ω0)を基準に他の車輪(T)における車輪速度(ωi)の速度比(Ki)を演算する速度比演算部(30)と、演算された速度比(Ki)が所定の数値範囲に含まれるか否かに基づいて、四輪のうち異径車輪に該当する車輪(T)を判定する異径判定部(40)と、を備えることを特徴とする。
(もっと読む)
制駆動力制御装置
【課題】機械制動トルク発生装置の制動性能の低下した車輪の混在時にバッテリが充電不可能でも各車輪に対して適切な制動トルクを発生させること。
【解決手段】車輪10FL,10FR,10RL,10RRへの要求油圧制動トルク及び車輪への要求モータトルクを車輪への要求全制動トルクに基づき各々算出して設定する要求油圧制動トルク設定手段41f及び要求モータトルク設定手段41gと、バッテリ33への充電可否の判定を行うバッテリ蓄電状態判定手段41jと、を備え、要求モータトルク設定手段41f及び要求機械制動トルク設定手段41gは、少なくとも1本の車輪に対してモータ回生トルクを働かせるときにバッテリ33が充電不可の場合、別のモータを力行駆動させる要求モータトルクの設定を行い、且つ、この別のモータからのモータ力行トルクが働く車輪に対して要求全制動トルクに応じた要求機械制動トルクの設定を行うように各々構成すること。
(もっと読む)
アンチスキッド制御用モータの制御装置
【課題】ABS制御用モータの制御装置において、モータの目標回転速度(ポンプの目標吐出流量に相当)を安定して適切な値に設定すること。
【解決手段】この装置では、リザーバ内のブレーキ液を汲み上げる液圧ポンプの目標吐出流量qreは、ABS制御中における車体減速度とABS制御の基準制御パターン(基準スキッド間隔Tskidbase、基準リザーバ液増大量Qupbaseを含む)との関係に基づいて作製されたテーブルMapqreqを利用して、車体減速度DVsoに対応するABS制御の基準制御パターンに対して最適な値に原則的に決定される。一方、1制御サイクルの継続時間であるスキッド間隔Tskidが基準スキッド間隔Tskidbaseよりも短い場合、或いは、減圧制御中におけるリザーバ液量の増大量であるリザーバ液増大量Qupが基準リザーバ液増大量Qupbaseよりも大きい場合、目標吐出流量qreがより大きい値に補正される。
(もっと読む)
走行制御装置
【課題】トラクション制御終了後に走行制御を自動的に復帰可能としつつも、トラクション制御と走行制御とが干渉してしまうのを防止する。
【解決手段】走行制御装置は、トラクション制御による駆動力制御期間中の駆動トルク最小値を取得し(ステップS5)、トラクション制御が終了したとき、ACCによる駆動トルク制御の上限値を規定する駆動トルク上限値にその駆動トルク最小値を設定する(ステップS7)。
(もっと読む)
アンチスキッド制御装置
【課題】ABSと自動加圧制御が制御干渉したときに、自動加圧の影響により、期待するW/C圧に制御できなくなることを防止する。
【解決手段】第1配管系統50aに属する右後輪RRにおいてABS中にESCが実行されたとすると、ESCが実行されている第1配管系統50aに関しては、第1差圧制御弁16の上下流間に差圧が発生させられているため、第1差圧制御弁16の下流側のブレーキ液圧がM/C圧よりも第1差圧制御弁16で発生させている差圧だけ高圧になる。このため、左後輪RLと対応する第4増圧制御弁38のソレノイドに流す制御電流の電流値IRLと比べて、右後輪RRと対応する第2増圧制御弁18のソレノイドに流す制御電流の電流値IRRを第1差圧制御弁16で発生させている差圧相当分だけ高くする。
(もっと読む)
車両用ブレーキ制御装置
【課題】ABS制御の減圧に必要な応答性を確保できるようにする
【解決手段】スリップ率が第1しきい値Th1よりも高い場合やスリップ率減少勾配が第2しきい値Th2よりも高い場合には、第1〜第4リニア弁SLFR、SLRL、SLFL、SLRRへの電流をOFFし、完全に電流が流れないようにしている。これにより、微小な電流の影響によって実際のW/C圧の減圧が緩やかに行われてしまうことを防止でき、減圧に必要な応答性を確保することが可能となる。
(もっと読む)
タイヤサイズ認識処理方法及びタイヤサイズ認識処理装置
【課題】従来の車両においては想定外であった異径タイヤの装着に対しても、走行のための各種の制御に支障を来すことなく、適切な制御が実現できるようにする。
【解決手段】車両への異径タイヤの装着の際、予め定められた前記車両に装着される異径タイヤの位置とタイヤ径の複数の組み合わせの中の該当する組み合わせにおけるタイヤ装着設定スイッチ部52の図示されないスイッチがオン状態とされると、電子制御ユニット51において、タイヤ装着設定スイッチ部52のスイッチの設定が判定され(ステップS102,S114,S120)、その判定結果に基づいて異径タイヤの装着状態が確定され(ステップS104,S116,S122)、その異径タイヤの装着状態に応じて、各種制御における演算パラメータの切り換えがなされ(S106,S118,S124)、その結果、ABS制御などの種々の動作制御が適切になされることとなる。
(もっと読む)
ブレーキ振動検知装置
【課題】 ブレーキ油圧を検出するのではなく、別の手法によってブレーキ振動を検出するブレーキ振動検出装置を提供する。
【解決手段】 左右輪の車輪速度差が所定のしきい値以上になったか否かに基づいてブレーキ振動を検出する。すなわち、車輪速度センサの検出信号に基づいてブレーキ振動を検知する。このような場合、車輪速度センサという簡素な構成のセンサを用いれば良く、従来のブレーキ油圧の変動に基づいてブレーキ振動を求める場合のように、高精度かつ高価なセンサを用いなくても、ブレーキ振動を検知することが可能となる。そして、このような車輪速度センサは、ABS制御等が行われる車両に現在一般的に搭載されていることから、新たに別の部品を搭載しなくても、ブレーキ振動を検知することができる。
(もっと読む)
車両の回生制動制御装置
【課題】 旋回時、低コストによる旋回挙動の推定ロジックに応じて前後輪の一方による回生制動を許容することで、旋回挙動の安定性確保と実用燃費の向上との両立を達成することができる車両の回生制動制御装置を提供すること。
【解決手段】 減速要求操作に基づき、前後輪のうち一方の車輪のみで回生制動を行う回生制動制御手段を備えた車両において、従動輪速と回生制動輪速との車輪速偏差を検出する車輪速偏差検出手段(ステップS9)を設け、前記回生制動制御手段は、制動旋回時、前記車輪速偏差が大きくなればなるほど回生制動量を小さく制限する手段とした。
(もっと読む)
悪路判定装置及びこの悪路判定装置を備えたブレーキ制御装置
【課題】 悪路判定装置に使用するアンチスキッドブレーキ制御による車輪速変動成分を容易に取り出すこと。
【解決手段】 各輪の車輪速変動を求める車輪速変動演算手段と、各輪の車輪加速度をばね下共振周波数よりも低い遮断周波数でカットする第1ローパスフィルタにより各輪のアンチスキッドブレーキ制御による車輪速変動を求めるアンチスキッドブレーキ車輪速変動演算手段と、前記車輪速変動から前記アンチスキッドブレーキ車輪速変動を差し引くことでアンチスキッドブレーキ制御による変動分を除去した車輪速変動補正値を求める補正手段と、前記車輪速変動補正値に基づいて悪路判定を行う悪路判定手段と、を備えた。
(もっと読む)
前後輪駆動車のトラクション制御装置
【課題】 本発明では、4輪スリップ時における失速感やスリップ解消時の加速性能の悪化を抑制できる4輪駆動車のトラクション制御装置を提供することを目的とする。
【解決手段】 トラクション制御装置40は、前輪平均車輪速度Vf、後輪平均車輪速度Vrおよび4輪平均車輪速度Vaを算出する平均車輪速度算出手段41と、推定車体速度Vbを算出する推定車体速度算出手段42と、4輪平均車輪速度Vaと推定車体速度Vbの差に基づいてエンジントラクション制御を行うエンジントラクション制御手段43と、前輪平均車輪速度Vfと後輪平均車輪速度Vrを比較し、平均車輪速度の大きい側の車輪を選択する制御対象選択手段44を備えている。また、トラクション制御装置40は、制御対象選択手段44で選択した車輪情報等を車両用ブレーキ制御装置30に送信し、その選択した車輪のみに対してブレーキトラクション制御を行う。
(もっと読む)
4輪駆動車の制御装置
【課題】たとえ、トラクション制御が有効ではない場合においても、過剰な駆動力の伝達を抑制し、車両挙動の安定を維持する。
【解決手段】ヨーモーメント制御とトラクション制御と左右輪間の差動制限が可能な差動制限制御で、センタデファレンシャルをクラッチで制御し前後駆動力配分制御が可能な車両において、トラクション制御OFFスイッチ35を備えている場合、センタデファレンシャル差動制限制御部40は、スイッチ35にてトラクション制御の作動が選択され且つヨーモーメント制御或いはトラクション制御が作動した場合、予め設定しておいた一定値を前後軸差動制限トルクとする。また、スイッチ35にてトラクション制御の非作動が選択され且つヨーモーメント制御が作動した場合、上述の一定値より大きな一定値を前後軸差動制限トルクとする。その他の場合は、演算した値を前後軸差動制限トルクとする。
(もっと読む)
車両のアンチロックブレーキ制御装置
【課題】ブレーキ操作に応じた液圧を出力する液圧発生手段および全車輪ブレーキ間にそれぞれ介設される入口弁と、アンチロックブレーキ制御時の増圧モードで入口弁を半開状態でデューテイ制御することによる緩増圧ならびに入口弁をその全開および全閉状態を繰り返すようにパルス制御することによる急増圧を切換えて制御することを可能とした制御ユニットを備える車両のアンチロックブレーキ制御装置において、増圧モードで緩増圧を選択している状態での増圧不足が生じることがないようにする。
【解決手段】制御ユニットCは、アンチロックブレーキ制御時に入口弁5A〜5Dをデューティ制御することによる緩増圧中に全輪の車輪速度の最大値および最小値の差が所定値未満となったときから所定時間が経過するまでの全輪の車輪速度に基づく平均減速度の積分値が閾値に対して減速不足側の値であったときに、増圧モードを緩増圧から急増圧に切換える。
(もっと読む)
1 - 14 / 14
[ Back to top ]