
Fターム[3D046JJ04]の内容
ブレーキシステム(制動力調整) (22,399) | 制御方法 (1,512) | 車体加減速度と基準値との比較 (128)
Fターム[3D046JJ04]に分類される特許
1 - 20 / 128
車両のブレーキ制御装置
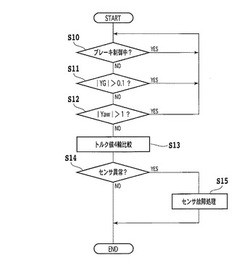
【課題】 ブレーキトルクセンサの配線の断線や短絡だけでなく、ゲインずれやドリフトを精度良く診断可能な車両のブレーキ制御装置を提供することである。
【解決手段】 左右前輪及び左右後輪にそれぞれ装着される複数の車輪ブレーキと、各車輪ブレーキが発生しているブレーキトルクを検出する複数のブレーキトルクセンサと、各車輪ブレーキのブレーキトルクを個別に制御する複数のアクチュエータと、各ブレーキトルクセンサの検出に基づいて、前記各アクチュエータを作動させて車輪のアンチロック制御又は車両の旋回姿勢制御を行うコントローラとを備えた車両のブレーキ制御装置において、前記コントローラは、各ブレーキトルクセンサの検出値を相互に比較してその比較結果に基づいて各ブレーキトルクセンサの故障を診断する故障診断手段と、前記アンチロック制御又は前記旋回姿勢制御を行っているときには前記故障診断手段の診断を禁止する診断禁止手段と、を含んでいることを特徴とする。
(もっと読む)
車両のブレーキ制御装置

【課題】エンジンブレーキ(スロットル弁開閉アクチュエータ20)及び車輪ブレーキ(車輪ブレーキ作動手段21)の両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する場合に、ブレーキ作動開始初期に制御が不安定になるのを防止する。
【解決手段】エンジンブレーキ及び車輪ブレーキの両方が作動していない状態から該両ブレーキを作動させて自車両を減速制御する際に、エンジンブレーキを車輪ブレーキよりも所定時間だけ遅延させて作動開始させる。
(もっと読む)
ブレーキ装置
【課題】液圧式ブレーキがフェードした場合であっても適切な制動力を得ることができ、乗用車等の小型車にも適用が容易なブレーキ装置を提供する。
【解決手段】ブレーキ装置を、ブレーキフルードの圧力に応じた制動力を発生する液圧式ブレーキ80と、電動アクチュエータ20によって駆動される電動式ブレーキ10と、液圧式ブレーキ80のフェード状態を検出するフェード状態検出手段40と、液圧式ブレーキ80のフェード状態が生じた場合に、フェード状態による液圧式ブレーキ80の制動力低下量に応じた制動力で電動式ブレーキを制動させる電動式ブレーキ制御手段40とを備える構成とする。
(もっと読む)
ブレーキ制御システム
【課題】運転者の意志を正確に反映して解除することが可能なブレーキ制御を実現する。
【解決手段】ブレーキ制御システム100において、ディスクブレーキユニットは、車輪に制動力を与える。ECU70は、ブレーキユニットによって車輪に与えられる制動力を制御する。ECU70は、運転者によりDACスイッチ26がオンにされ、シフトセンサ28により所定のシフトポジションであることが検出された場合に、ブレーキペダルが操作されなくても、車両の速度が所定の値より大きくならないよう車輪に与える制動力を制御するDACを実施する。ECU70は、所定の踏み込み速度より大きい速度でブレーキペダルが踏み込み操作されたときにDACを解除する。
(もっと読む)
車間距離制御装置
【課題】停止車両以外の静止物体を車間制御のターゲットから極力除外し、また、車間制御のターゲットを先行車両から割込車両へ早期に変更することができる車間制御装置を提供する。
【解決手段】運転者がコントロールSW21から停止車両選定指示や割込車両選定指示に対応するコースト操作を行った場合に、停止車両や割込車両をターゲットの候補として抽出しやすくする。
(もっと読む)
車両制動力制御装置
【課題】 停止ショック低減制御とABSとを併用する場合において、車両が停止状態に移行する際にABSが作動しても停止ショックを抑制すること。
【解決手段】 車両用ブレーキ制御装置1は、車輪のロックを抑制するために左右輪の制動力を独立に制御可能なABS制御部15aと、車両の車速が閾値未満になった場合に車両の制動力を低減させ、車両が停止した時に制動力を増大させる停止ショック低減制御部15bとを備え、車両の車速が閾値未満になった場合に、ABS制御部15aによる制御を、左右輪の各輪に基づく独立制御から左右輪のうち車輪速が低い方の車輪に基づくローセレクト制御に切り替えることを特徴とする。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者が速度順応現象に陥ったときに車両の安全を確保する。
【解決手段】走行情報取得部22は、車両走行情報を取得して蓄積する。判定部24は、車両走行情報の履歴に基づいて、高速走行により車両の運転者の速度感覚に影響を及ぼしうる時間として予め定められた所定時間にわたり高速走行が継続している速度順応条件が成立するか否かを判定する。制御量変更部26は、判定部24により速度順応条件が成立すると判定されたとき、運転者によるブレーキ操作量にしたがって設定される目標減速度を通常走行時より増加させる。ブレーキ制御部28は、目標減速度を参照して車両に制動力を発生させる。
(もっと読む)
制動力制御装置
【課題】ブレーキバイワイヤにおいて、ブレーキ戻し操作時における制動変化の違和感発生を抑えることが可能な制動力制御装置を提供する。
【解決手段】
運転者のブレーキペダル1の踏込みストロークに応じたマスタシリンダ圧Pを出力するマスタシリンダと、マスタシリンダ圧P及びブレーキペダルの踏込みストローク量Sに基づいて目標減速度Gを算出し該目標減速度となるようにホイルシリンダの制動力を制御する。上記目標減速度Gを算出する際の上記マスタシリンダ圧Pの寄与度合をマスタシリンダ圧Pが大きいほど大きくなるように設定する。そして、ブレーキペダル1の戻し中における目標減速度Gの一時的な上昇を制限する手段を備える。
(もっと読む)
ブレーキ制御装置
【課題】ドラムブレーキを搭載した車両において悪路走行時等のブレーキシューの挙動を簡易に抑制し、その周辺部品との摩擦による異音を防止または抑制する。
【解決手段】車両に作用する上下方向加速度が大きいときに、ドラムブレーキのホイールシリンダに予備的な液圧がかけられ、ブレーキシューがシューリターンスプリングの付勢力に抗して拡開方向に動作させられる。これにより、弾性的に支持されたブレーキシューの支持剛性が高くなるとともに、ブレーキシューの摺り上がりまたは摺り下がり方向の摩擦力が大きくなる。その結果、ブレーキシューの摺り上がりおよび摺り下がりが発生し難くなり、バッキングプレートのレッジ面とブレーキシューとの摺動等による異音の発生を防止または抑制できる。一方、ブレーキシューが不必要にブレーキドラムに接触しないようにすることで、ブレーキの引き摺りを防止することもできる。
(もっと読む)
車両用運転支援システム
【課題】 同乗者の乗り心地を向上させる。
【解決手段】 車両の加速度が加速度判定値未満になるようにスロットルバルブの開度及び制動装置等を制御する。これにより、車両が発信した際に車両の乗員に対して必要以上の慣性力が作用しないので、同乗者の乗り心地を向上させることができる。
(もっと読む)
制駆動力制御装置
【課題】車輌が路面摩擦係数の異なる路面へと乗り移る際のドライバビリティ向上
【解決手段】車輌の前輪10FL,10FR側で測定した路面摩擦係数の変化を検知した際に、路面摩擦係数の低い路面への乗り移りであれば後輪10RL,10RRの制動力又は駆動力を低下させ、路面摩擦係数の高い路面への乗り移りであれば後輪10RL,10RRの制動力又は駆動力を上昇させる後輪制駆動力制御手段1eを備え、この後輪制駆動力制御手段1eは、乗り移り後の路面の路面摩擦係数に対応させた後輪10RL,10RRの制動力又は駆動力の制御態様を少なくとも路面摩擦係数の変化度合いと車輌の走行状態の情報に基づいて変更するように構成すること。
(もっと読む)
車両の走行制御装置
【課題】簡単な制御で実現でき、また、停止間際での不要な減速度変化を抑制し、ドライバに対して不自然な感覚を与えることなく安定した停止を行う。
【解決手段】走行制御ユニット5は、先行車が略停止状態と推定される場合には、先行車の直後の第1の領域と、この第1の領域の後方に第2の領域とを設定する。そして、自車両1が第2の領域の更に後方の領域を走行している場合には、先行車後方のDstopの位置で停止する減速度G3を演算出力し、自車両1が第2の領域を走行している場合には、車両がクリープ現象で走行するクリープ車速V2よりも低車速の場合に限り、一定の減速度KG2を出力し、自車両1が第1の領域を走行している場合には、車両がクリープ現象で走行するクリープ車速V1よりも低車速の場合に限り、上述の一定の減速度KG2よりも大きな一定の減速度KG1を出力する。
(もっと読む)
車両用ブレーキ制御装置
【課題】各車輪ごとのW/C圧を圧力センサにて測定しなくても、差圧制御弁の製造バラツキなどに起因する差圧のずれを抑制する。
【解決手段】目標減速度と実際の車体減速度との差をフィードバックし、この差に基づいて第1、第2差圧制御弁16、36の電流指示値の補正を行う。これにより、第1、第2差圧制御弁16、36の製造誤差等の要因に起因して第1、第2差圧制御弁16、36の電流指示値と実際の差圧との関係にずれが生じたとしても、それを補正してドライバの意図する制動力、減速度を発生させることが可能となる。そして、このような手法によれば、各車輪ごとのW/C圧を圧力センサにて測定しなくても、上記補正を行うことが可能となる。
(もっと読む)
車線逸脱防止装置
【課題】ヨーレイトセンサの検出精度の影響を受けず、最適値のヨーモーメントを算出する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御として車両に付与する目標ヨーモーメントを補正ヨーモーメントを用いて算出し(ステップS7、ステップS8)、走行車線に対する車両の逸脱傾向の度合いが高いと判定した場合、目標ヨーモーメントが車両に付与されるように車両の走行制御をしており(ステップS10)、補正ヨーモーメント算出処理により、車両のヨーレイトが、該ヨーレイトに対応して設定した所定のしきい値未満であると推定される間、減速度を変数に含んで目標ヨーモーメントを算出し、車両のヨーレイトが前記所定のしきい値以上であると推定した場合、ヨーレイトセンサが検出したヨーレイトを変数に含んで目標ヨーモーメントを算出する。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力の統合型制御に於いて、種々の要因により目標加減速度と実加減速度との偏差が通常のフィードバック制御では抑制しきれない状況に於いて、そのことによる不具合の発生を抑制するよう目標制駆動力を適切に設定する制駆動力制御装置を提供すること。
【解決手段】 本発明の制駆動力制御装置では、目標加減速度が制駆動力実現系では達成できないとき(S60)、目標加減速度に基づいて目標制駆動力が制駆動力実現系がその発生可能な制駆動力の限界で作動するよう設定し直され(S70)、フィードバック制御量が目標制駆動力とフィードフォワード制御量との差分に設定し直されて(S80)、次のフィードバック制御量の算出に利用される。
(もっと読む)
車両の制御量設定装置
【課題】車両が長期にわたって使用されても、車両の運動制御を好適に実行させることができる車両の制御量設定装置を提供する。
【解決手段】制御量設定装置11を構成するECU16は、車両状態を数値的に表す車両状態値としてヨーレート偏差を検出する。また、ECU16は、車両の走行距離を車両特性値として読み出し、該走行距離が走行距離閾値よりも大きいか否かを判定する。そして、走行距離が走行距離閾値以下である場合、ECU16は、車両特性が未だ変化していないものと判断し、走行距離を加味することなく、ヨーレート偏差のみに基づき制御量を設定する。一方、走行距離が走行距離閾値よりも大きい場合、ECU16は、車両特性が変化してしまったものと判断し、ヨーレート偏差と走行距離とに基づき制御量を設定する。
(もっと読む)
車両の直進制動時の運転制御装置及び運転制御方法
【課題】車両の構造に内在する左右の非対称性に起因して車両の制動時に生ずる車両の偏向を是正する新規な車両の運動制御装置及び運動制御方法を提供すること。
【解決手段】本発明の車両の運動制御装置は、車体の減速度を取得する手段と、減速度に基づいて、制動装置、前後輪の操舵装置等の車体偏向手段の作動を制御して、車両の構造に於ける左右の非対称性に起因して車両の直進制動時に車体に発生する横力又はヨーモーメントを低減する横力又はヨーモーメントを発生させる偏向制御手段とを含む。
(もっと読む)
車両の走行制御装置
【課題】カーブ走行中において車速制御と旋回走行制御との協調を図る。
【解決手段】走行制御装置は、制駆動力制御により、目標車速に実車速を一致させる制御を行う車速制御と、カーブ内で車両を減速制御する旋回走行制御とを行っており、旋回走行制御の終了を検出した場合(ステップS41)、該旋回走行制御の終了時点の車速に基づいて、車速制御における目標車速を減少補正する(ステップS44、ステップS47)。
(もっと読む)
車両の走行制御装置
【課題】先行車両と自車両との車間距離の変化の度合いに応じて適切な自車両の加減速度を設定して乗員が違和感を感じないようにすることを課題とする。
【解決手段】自車両前方の先行車両と自車両との車間距離が目標車間距離を維持するように自車両の走行状態を制御する制御ユニット40は、先行車両と自車両との車間距離と目標車間距離との偏差に基いて自車両の基本加減速度を設定し、先行車両と自車両との車間距離の変化の度合いを検出し、基本加減速度を車間距離の変化の度合いに基いて補正することにより自車両の最終加減速度を設定し、そして、その最終加減速度で自車両の走行状態を制御する。
(もっと読む)
車両の制動力制御装置
【課題】 種々の車両の前後方向の加減速度制御の要求に基づいて、車両の駆動系装置及び制動系装置の作動を統合的に制御しようとする場合に有利に用いられる車両用の制動力制御装置を提供すること。
【解決手段】 車両の制動力制御装置100は、車両全体に於いて発生されるべき要求制駆動力を取得する手段100,200と、駆動系装置に於いて発生可能な制駆動力を取得する手段100,210と、制動系装置の作動を制御する手段100,220とを含み、駆動系装置に於いて発生可能な制駆動力に応じて制動系装置を作動させることを特徴とする。
(もっと読む)
1 - 20 / 128
[ Back to top ]