
Fターム[3D052JJ36]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 操作対象機械要素 (1,062) | 自動操向装置 (15)
Fターム[3D052JJ36]に分類される特許
1 - 15 / 15
作業車の操向制御装置
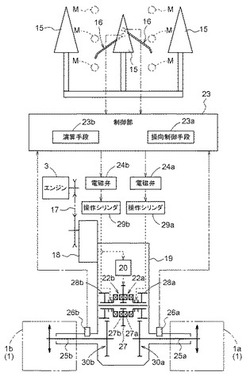
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
農作業機の自動操向制御装置

【課題】本発明では、発信機と受信機等の通信機器を設けることなく、圃場に凹凸が有っても自動的に直進走行になるように制御する自動制御の操向制御装置を設けることで、農作業機を運転して農作業を行う作業者の労力を軽減し効率的作業を行えるようにすることが課題である。
【解決手段】走行装置を操向する操向制御装置と機体の進行方向を検出する進行方向検出手段を機体に設け、該進行方向検出手段が直進からずれたことを検出すると操向制御装置を直進に修正すべく制御したことを特徴とする農作業機の自動操向制御装置とした。
(もっと読む)
作業車両の操舵制御装置
【課題】作業車両の左右操舵装置において、走行面に適した速度で操舵できるものとし、旋回精度を高める。
【解決手段】操舵操作装置(11)の操作位置を検出する操作位置検出手段(SE1)と、機体の角速度を検出する角速度検出手段(SE2)と、左右のサイドクラッチ駆動手段(22,23)と、サイドクラッチ比例減圧弁(24)とを備え、操作位置検出手段(SE1)の検出情報に基づいて左右のサイドクラッチ駆動手段(22,23)を作動して左右方向に操舵し、該操舵状態における角速度検出手段(SE2)からの検出情報が所定の上限角速度または下限角速度を超えた場合に、この所定の上限角速度乃至下限角速度の範囲内の角速度を維持すべくサイドクラッチ用比例減圧弁(24)を自動的に減圧あるいは増圧調整する。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
移動ロボットの旋回制御方法
【課題】軽量小型の移動ロボットを旋回させるに際して、旋回し得ない状況に陥ったとしても、駆動用モータの焼き付きを阻止可能な移動ロボットの旋回制御方法を提供する。
【解決手段】車体2の前後左右に配置した四個の車輪3と、車輪3を個々に駆動する駆動用モータ4と、駆動用モータ4を個々に制御するモータコントローラ5と、遠隔操縦装置A又は自律制御装置Bからの動作指令に基づいて車輪3の各旋回速度を算出してモータコントローラ5に速度指令を与える制御回路10を備えた移動ロボット1を旋回させるに際して、遠隔操縦装置A又は自律制御装置Bから出された超信地旋回指令が終了した時点において、制御回路10では、モータコントローラ5に対してサーボオフ指令を出力して駆動用モータ4の過電流状態を解除した後、次の指令信号周期においてモータコントローラ5に対してサーボオン指令を出力して駆動用モータ4に電流を印加する。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、作業地に対する車輪のスリップ率を検出するスリップ率検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、スリップ率検出手段で検出された車輪のスリップ率とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
作業車両
【課題】操向ハンドルにステアリングスイッチを設けたコンバインにおいて、操向ハンドルの回動操作の際にステアリングスイッチに誤って接触して、走行機体が予想外の方向に旋回するという問題を解消する。
【解決手段】ステアリングスイッチの微調節操作の可否を選択操作するための選択調節スイッチを備える。旋回用HST式変速機構64と差動ギヤ機構86との間に配置された操向ブレーキ手段167及び操向クラッチ手段169は、選択調節スイッチの入り切り操作に連動して、旋回用HST式変速機構64から差動ギヤ機構86への動力伝達を許容したり阻止したりするように構成する。
(もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
移植機
【課題】旋回中のスリップなどに影響を受けることなく、一定のタイミングで植付クラッチを自動的に入操作し、各行程の植付開始位置を精度良く揃える。
【解決手段】走行機体1に連結される植付部3と、該植付部3への動力供給を入切する植付クラッチとを備える乗用田植機(移植機)において、走行機体1の左車輪回転及び右車輪回転を検出し、その検出信号に基づいて植付クラッチを自動的に入操作する制御装置9を備え、該制御装置9は、左右車輪8の回転差が所定以上となることに基づいて旋回開始を判断し、旋回開始判断後、左右車輪8の回転差が所定以下となることに基づいて旋回終了を判断し、さらに、旋回終了を判断してから所定距離走行後に植付クラッチを自動的に入操作する。
(もっと読む)
乗用型作業機
【課題】 従来、前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題がある。
【解決手段】作業装置7を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置7の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置7の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置Sを機体に設けたミッションMの上面に配置して設けた乗用型作業機。
(もっと読む)
コンバイン
【課題】操向操作具の回転操作中に進路変更手段を誤操作しても、該進路変更手段の操作よりも操向操作具の回転操作を優先して進路変更するものとして、操作性を向上させる。
【解決手段】操向操作具(16)を左右いずれかに回転操作すると旋回用の油圧式無段変速装置(40)の回転出力によって片側のホイル軸(30)を減速させて旋回し、更に回転操作すると旋回用の油圧式無段変速装置(40)の回転出力によって左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に表示し、操向操作具(16)から手を離すと旋回用の油圧式無段変速装置(40)の回転出力を停止させて直進するように構成する。更に、操向操作具(16)の回転操作中に進路変更手段(17)が操作されても、操向操作具(16)の操作を優先して進路変更することができるように構成する。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、自動走行手段及び人為選択操作具を備えた場合、人為選択操作具の操作により自動走行手段の作動の選択が適切に行われるように構成する。
【解決手段】 前輪1を操向操作可能なアクチュエータ27を備えて、アクチュエータ27を前輪1に機械的に連係させる連係状態及び解除状態に設定自在に構成する。検出手段38の検出に基づいて機体が既に植え付けられた隣の苗列L1に沿って走行するように、アクチュエータ27により前輪1を自動的に操向操作する自動走行手段を備える。人為選択操作具29により自動走行モードが設定されると、アクチュエータ27が連係状態に設定されて自動走行手段が作動し、人為選択操作具29により手動走行モードが設定されると、アクチュエータ27が解除状態に設定される。
(もっと読む)
コンバイン
【課題】操向操作具の回転操作中に進路変更手段を誤操作しても、該進路変更手段の操作よりも操向操作具の回転操作を優先して進路変更するものとして、操作性を向上させる。
【解決手段】操向操作具(16)を左右いずれかに回転操作すると旋回用の油圧式無段変速装置(40)の回転出力によって片側のホイル軸(30)を減速させて旋回し、更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に該スピン旋回を入り切りすることができるように構成し、操向操作具(16)から手を離すと旋回用の油圧式無段変速装置(40)の回転出力を停止させて直進するように構成する。更に、操向操作具(16)の回転操作中に進路変更手段(17)が操作されても、操向操作具(16)の操作を優先して進路変更することができるように構成する。
(もっと読む)
走行装置
【課題】標準モードでの走行時の旋回用クラッチの制動圧と湿田モードでの走行時の旋回用クラッチの制動圧をそれぞれ適正に調整できる操舵機構を有する走行装置を提供すること。
【解決手段】湿田モード(旋回中の旋回内側の走行駆動体3の回転数を標準モードの設定値より上げる)での走行時及び/又は標準モード(旋回時に旋回内側の走行駆動体3をゼロ又はほぼゼロ回転にする)での走行時に旋回内側と旋回外側の走行駆動体3,3の制動圧をそれぞれ制御し、かつ前記脱穀クラッチの入り時には湿田モードでの旋回クラッチ82の制動圧を用い、前記脱穀クラッチの切り時には標準モードでの旋回クラッチ82の制動圧を用いる制動圧制御を行うことで、コンバインの走行操作性が向上し、さらに、路上走行時の標準モードへの切り替え忘れ、また湿田モードの制動圧調整忘れに対しても、旋回不良が回避でき、安全性が向上する。
(もっと読む)
1 - 15 / 15
[ Back to top ]