
Fターム[3D114DA18]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | ワーク取扱装置 (1,047) | 開閉装置(ドア、ボンネット等の開閉装置) (17)
Fターム[3D114DA18]に分類される特許
1 - 17 / 17
車両用パネルクランプ装置
【課題】仕様と表面屈曲度に関係なくフードパネルをクランプすることのできる車両用パネルクランプ装置を提供する。
【解決手段】ベースフレームと、ベースフレームの左右両側に設けられ、第1スライドプレートを左右方向に往復移動させる第1移動ユニットと、ベースフレームの前方と後方に設けられ、第2スライドプレートを前後方向に往復移動させる第2移動ユニットと、左右方向に移動可能で、第1垂直移動手段により上下方向に移動可能に構成され、パネルの左右をクランプする第1クランプユニットと、前後方向に移動可能で、第2垂直移動手段により上下方向に移動可能に構成され、パネルの前方をクランプする第2クランプユニットと、後方に配置され、前後方向に移動可能で、第3垂直移動手段により上下方向に移動可能に構成され、パネルの後方をクランプする第3クランプユニットと、を含むことを特徴とする。
(もっと読む)
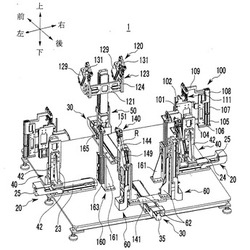
塗装システムおよびドア開閉用ロボットの開閉ハンド

【課題】走行装置を用いることなくドアの内側部の塗装を行うことが可能な塗装システムを提供する。
【解決手段】この塗装システム100は、車体120を搬送するコンベア10と、高さ位置H2に固定的に設置され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の内部を少なくとも塗装する塗装用ロボット20と、高さ位置H2とは異なる高さ位置H3に固定的に設置されるとともに塗装用ロボット20と作業範囲がオーバーラップ可能なように構成され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の開閉およびドア開放状態の保持を行うドア開閉用ロボット30とを備える。
(もっと読む)
ワーク加工用固定治具の交換装置
【課題】加工用ワークをクランパーで固定するワーク加工用固定治具を小型軽量化することができ、ワーク加工用固定治具の格納スペースの拡大と、タクトタイムが長くなることを防ぐことができ、而もパレットの格納スペースを大きくすることなく多車種に対応するワーク加工用固定治具を簡易な構成にできるワーク加工用固定治具の交換装置を提供する。
【解決手段】ワーク加工用固定治具20A、30Aをクランプするクランパーを、相反する方向に形成される垂直面それぞれに設置していると共に、前記各垂直面を垂直回転軸によって垂直回転させる回転機構をそれぞれ備る2つの固定治具固定ユニット2、3と対になるワーク加工用固定治具20A、30Aが格納される治具ストッカ4と、ワーク加工用固定治具20A、30Aを、治具ストッカ4の治具格納位置及び前記クランパーのクランプ位置間で移動させる産業用搬送ロボット5を備える。
(もっと読む)
ドア治具
【課題】スライドドアを車体に対して各種作業に適した状態で位置決め保持可能とし、かつ搬送ライン周辺の作業スペースの縮小を図ることができるドア治具を提供する。
【解決手段】第一アーム8及び第二アーム9の一端は、車体側ベース部2のブラケットに回動軸を異にして回転自在に接続され、第一アーム8及び第二アーム9の他端は、ピボット部材13の一側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の一端は、ピボット部材13の他側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の他端は、ヒンジ部材37に回転軸を異にして回転自在に接続され、スライドドア側ベース部3は、ヒンジ部材37に連結軸46を介して回転自在に支持される。
(もっと読む)
ドア治具
【課題】ドア治具を介した車体に対するドアの係脱をロボットにより操作する場合に、ドア治具の位置検出や把持機構、複雑なロボットのティーチング作業が不要となるドア治具を提供する。
【解決手段】車体wのセンターピラーw1に取り付けられる車体側治具10とドアdに取り付けられるドア側治具30とから構成され、車体側治具10に形成した車体側係合部14とドア側治具30に形成したばね線材からなる弾性部材35とを係合させることにより、車体wに対してドアdを所定の開度で保持するドア治具1とした。車体側係合部14は棒状部材として構成され、弾性部材35は、車体側係合部14を乗り上げるように弾性変形する起立部42と、車体側係合部14に係合する係合凹部24とを有する。
(もっと読む)
位置決め装置
【課題】ラゲージ及びバックドアのいずれにも共通して使用することのできる、位置決め装置を提供する。
【解決手段】ワーク101,102を載置して位置決めするための位置決め装置であって、ヒンジ部10を介して連結された第一の治具11及び第二の治具12と、ワーク101,102の形状に合わせてこの第一の治具11及び第二の治具12の開き角度を変化させる駆動機構13とを有する、位置決め装置1を構成する。
(もっと読む)
ドア固定治具及びドア固定治具を用いたドアの開閉方法
【課題】搬送時の振動によりドアが開閉するのを防止し、ドアを確実に保持すると共に小型化を図ることができるドア固定治具及びドア固定治具を用いたドアの開閉方法の提供。
【解決手段】車体塗装工程においてドアDを車体に対して所定の開度で固定するドア固定治具であって、センターピラーS近傍に位置決め固定される車体側治具Aと、ドアDのインナパネルD2とドアスキンD1との間のドア開口部D3に位置決め固定されるドア側治具Bと、車体側治具Aとドア側治具Bとを連結する連結治具Cとを有し、連結治具Cの連結治具本体17を車体側治具Aの係合部2に係止して両者を固定し、連結治具Cに設けた磁石及びこれを保持するホルダ25の開口縁を、ドア側治具Bの吸着プレート11の吸着面11bに吸着させて車体側治具Aとドア側治具Bとを連結してドアDを車体に固定したことを特徴とする。
(もっと読む)
蓋開閉システム、蓋開閉用治具および蓋開閉方法
【課題】対象物の本体部材に開閉可能に取り付けられる蓋部材を確実に開閉することが可能な蓋開閉システム、蓋開閉用治具、および蓋開閉方法を提供する。
【解決手段】自動車1のドア3を開閉するドア開閉システム100に、ドア3に固定される胴体部111、基準面136aが形成される位置決め板136、待機位置と解除位置との間で移動する解除部141、並びに治具側係合部151を備えるドア開閉用治具110と、フック172およびフック172の先端部から投受光する光学式センサ173を有するアーム側係合部171を備える操作アーム170と、基準面136aで反射されて光学式センサ173で受光される光により検出された相対位置に基づいてアーム側係合部171を解除部141に当接させてドア3の係止を解除するとともに治具側係合部151に係合した状態でアーム側係合部171を移動させてドア3を開く制御装置181と、を具備した。
(もっと読む)
車体組立装置及び車体組立方法
【課題】より効率的な組立作業を行って生産コストの低下を図る。
【解決手段】車体部品がセットされる治具台車1が移動可能な車体部品搬送経路3を設け、車体部品搬送経路3は、治具台車1に車体部品をセットする部品セット部21と、部品セット部21でセットした車体部品に対して溶接ロボット27,29により溶接作業を行う部品組付部23,25と、部品組付部23,25で溶接完了した車体部品を搬出する部品搬出部33,35,37と、をそれぞれ備える。同一車種の車体部品を連続して生産する際には、部品搬出部33,35,37で車体部品を搬出した後の空の治具台車1を、治具台車格納部17に格納せずに、バイパス部45を通して部品セット部21側に移動させる。
(もっと読む)
車両用ドアの仮保持具
【課題】車体組付け工程において開閉体を僅かに開いた位置に仮保持可能で、かつ必要に応じて開閉体を簡単に開けることができるようにする。
【解決手段】開閉体を僅かに開いた位置に仮保持するための仮保持具6であって、ストライカ3に対して係脱可能な第1係合部分61と、第1係合部分61に連設され、かつラッチ装置2に対して係脱可能な第2係合部分62とを有する。第1係合部分61がストライカ3に対して係合した状態で、ラッチ装置2が第2係合部分62に係合することにより開閉体を仮保持し、また、開閉体を仮保持した状態から開き方向へ操作することにより、第1係合部分61がストライカ3から外れて開閉体の開きを可能にする。
(もっと読む)
ドア固定治具
【課題】自動車車体の塗装工程において車体に対するドアの回動を固定するドア固定治具において、当該治具の小型化を図ると共にドアの回動をガタつきなく確実に固定する。
【解決手段】車体Wに取り付けられる本体フレーム1に支持されて略垂直に延びるガイド筒2と、該ガイド筒2に上下動可能かつ回動可能に挿通される軸部3aを有する鉤形の固定アーム3と、前記軸部3aから起立したガイドピン6を挿通するべく前記ガイド筒2の側部に形成されるガイド溝5とを備え、前記固定アーム3をガイド溝5に沿って下降させることで、前記係止部3bがドアDの回動端部t近傍に係合して該ドアDの車体Wに対する回動を固定すると共に、該固定状態から前記固定アーム3をガイド溝5に沿って上昇させることで、前記係止部3bがドアDの回動端部t近傍から離脱して該ドアDの車体Wに対する回動を可能とする。
(もっと読む)
ドア取り外しシステム
【課題】占有スペースを削減でき、かつ、コストを低減して、サイクルタイムを短縮できるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステム1は、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステム1は、ドア11を上下から挟持する双腕ロボット20と、ボルト12を取り外す単腕ロボット30と、これらを制御する制御装置と、を備える。制御装置は、双腕ロボット20の一対のマニピュレータ22A、22Bでドア11を上下から挟持し、この状態で、単腕ロボット30でボルト12を取り外し、その後、双腕ロボット20でドア11を搬送する。
(もっと読む)
ドア固定治具
【課題】車両のドアを所定の開放状態に固定するべくドアヒンジに着脱可能に取り付けられるドア固定治具において、ドアヒンジへの特別な構成の追加を抑え、かつ該ドアヒンジに容易かつ強固に取り付け可能とする。
【解決手段】車体側ヒンジブラケット101の起立部101bに当接すると共に車体側ヒンジブラケット102の切り欠き部Aに係合可能な係止部材1と、該係止部材1に回動可能に支持される回動部材3とを有し、ドアDの所定の開放時に、前記係止部材1が前記起立部101bに当接すると共に前記切り欠き部Aに係合し、かつ前記回動部材3が両ヒンジブラケット101,102間に形成される隙間Sからヒンジ内側に入り込み、この状態で前記回動部材3が回動して前記係止部材1と共に前記起立部101bを挟持する。
(もっと読む)
自動車の蓋物開閉装置
【課題】蓋物を開いて作業を終了した後に当該蓋物の閉ロック状態を確認できる自動車の蓋物開閉装置を提供する。
【解決手段】ストッパ部材2を第1位置と第2位置とのそれぞれに動作させる第1アーム31と、第1アームに装着され、当該第1アームに対して蓋物の開閉方向へ相対移動可能に設けられた第2アーム32と、第1アームに対する第2アームの相対位置を検出する検出手段34とを備え、第1アームによりストッパ部材を第2位置に動作させ、第1アームを蓋物の開方向へ所定距離だけ動作させたときに、検出手段により検出される第2アームの相対位置に基づいて、蓋物が閉ロック状態にあるか否かを判断する。
(もっと読む)
自動車用開閉体の建付精度評価方法
【課題】インラインでのサイドドアの全数検査が可能であって、ボデイに実際のサイドドアを組み付けることなく、組み立てられた実際のサイドドアの建付精度の評価に同じく実際に生産されたボデイ側のドア開口部の形状を反映させて、ドアの建付精度の評価結果の信頼性向上を図った方法を提供する。
【解決手段】組み立てられたサイドドアDrまたはDf単独の実測データと、同じく組み立てられたボデイ単独での実測データとを、データ処理装置23においてボデイ座標系のドアヒンジ取付穴を基準に互いに突き合わせて、サイドドアのパーティング部での建付精度を演算・解析する。
(もっと読む)
蓋物部材の取付方法及び同装置
【課題】車体と蓋物部材との左右の隙間を揃えることができる蓋物部材の取付方法を提供することを課題とする。
【解決手段】図(a)に示すように、車体11の後部開口57へ、後部第1のロボット26でトランクリッド25を近接させる。(b)に示すように、後部第1のロボット26でトランクリッド25を支えながら、第2のロボット21、22に付設したレーザ照射器34とカメラ35とで、左の隙間C1及び右のC2隙間を測定する。(c)において、左右の隙間がほぼ同一のC3、C4になるように、左右移動機構39にてトランクリッド25を左又は右へ移動する。次に、第2のロボット21、22に付設した締結機構32、32でヒンジ連結具を車体に締結する。
(もっと読む)
ワークピースの可動部分の位置決め装置
【課題】ロボットとワークとの間隔が所定間隔から変化したときでもワークを適切に位置決めできる装置を提供する。
【解決手段】位置決め装置10は、第1および第2の当接部材38、40を有する当接アセンブリを含む。また、位置決め装置10は、第1の当接部材38がワークピース16の部分の外側表面に隣接して配置され、第2の当接部材が部分によって画定された外側空間に配置される位置特定位置と、第2の当接部材40が部分内に配置され、第1の当接部材が部分によって画定された外側空間に配置される挿入位置との間で当接アセンブリを移動させるアクチュエータアセンブリ48を含む。また、アクチュエータアセンブリ48は、ワークピース16の部分と第1および第2の当接部材38、40の少なくとも一方との当接によって部分を本体19と相対的に移動させる。
(もっと読む)
1 - 17 / 17
[ Back to top ]