
Fターム[3D232CC26]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661) | 誤判定、誤作動防止(フェイルセーフ) (187)
Fターム[3D232CC26]の下位に属するFターム
ノイズ対策 (57)
センサ異常値検出(故障以外に起因するもの) (40)
Fターム[3D232CC26]に分類される特許
1 - 20 / 90
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
ステアリング装置、産業車両およびプログラム

【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
ヨーレート較正装置
【課題】車両の走行状態における規範ヨーレート較正法だけでヨーレートセンサのゼロ点の較正ができるヨーレート較正装置を提供する。
【解決手段】ヨーレート較正装置100Aは、操舵方向を判定する操舵方向判定部15、車速演算部19、直進状態判定部12A、直進走行状態と判定された際の操舵角θHを記憶する操舵角記憶部13A、操舵角記憶部13Aに記憶された操舵角θHの値の分布に基づいて操舵角センサSHAの不感帯領域を演算する操舵角検出不感帯領域演算部14A、不感帯領域と操舵方向判定部15によって判定された操舵方向に基づいて操舵角θHを補正する操舵角補正部16、操舵角−ヨーレート特性データ104bと補正された操舵角θCHと車速VSとに基づいてヨーレートγのゼロ点を較正するヨーレートオフセット量演算部17及びヨーレートゼロ点補正部18と、を備える。
(もっと読む)
電動パワーステアリング装置
【課題】2系統のトルクセンサのうち異常が発生しているトルクセンサを特定でき、かつ、異常が検出されていない側のトルクセンサの検出値に基づいて、安全に操舵アシストを継続できるようにする。
【解決手段】異常検出部110は、推定トルク演算部200により算出した推定トルクTrxと、トルクセンサトルクにより検出した操舵トルクTr1,Tr2との偏差(|Tr1−Trx|,|Tr2−Trx|)を信頼度として設定する。そして、信頼度が小さい方のトルクセンサにより検出した操舵トルクを使って目標アシストトルクTas*を設定する。この場合、アシストトルク制限部160により、信頼度Cに応じたアシスト制限を行う。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】電源線上の回路動作を伴うことなく、簡素な構成にて、停止直後の再始動時においても精度よく、リレー装置の溶着異常を判定することのできるモータ制御装置を提供すること。
【解決手段】異常判定手段としてのマイコンは、リレー装置とコンデンサとの間の電圧をリレー監視電圧V_rmとして検出する。また、当該リレー監視電圧V_rmの変化量として、その今回周期において検出された今回値と前回周期において検出された前回値(V_rm0)との差分値δV_rmを演算する。そして、リレー監視電圧V_rmが電圧閾値Vthよりも高く、且つその変化量(差分値δV_rm)が変化量閾値δVthよりも低い場合(V_rm>Vth、且つδV_rm<δVth)に、リレー装置に溶着異常が生じていると判定する。
(もっと読む)
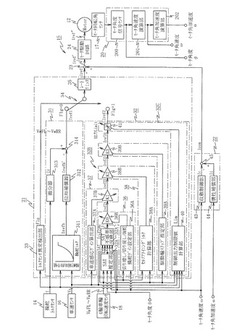
電動パワーステアリング装置
【課題】車載LAN経由で入力される情報に基づくパワーステアリング制御を安価な装置で実現する。
【解決手段】少なくともトルク信号TRQに基づいてモータ6に対するモータ電流指示値を決定するモータ指示電流決定手段、及びモータ電流指示値に従ってモータ電流を制御するモータ電流制御手段を含む制御装置(メインマイコン)503と、トルク信号TRQとモータ電流信号Imdから制御装置503の異常を検出し、異常を検出した場合にモータ6の駆動を制限する監視装置(サブマイコン)512とを備え、監視装置512は、異常と判断する第1の領域と、モータ電流信号Imdの増加率に基づき異常、正常を判断する第2の領域と、正常と判断する第3の領域とを持ち、トルク信号TRQとモータ電流信号Imdに基づいて第1乃至3の領域判別を行う。
(もっと読む)
運転支援装置
【課題】簡易な方法で、画像認識の妨げとなるようなものが走行路面に存在していても、安定したLKA制御およびLDW制御を行うことのできる運転支援装置を提供する。
【解決手段】運転支援装置は、車両前方を撮像する撮像手段と、撮像手段が撮像した画像から走行路面の区画線を検出し、走行レーンを設定する設定手段と、当該走行レーンに沿って走行できるように車両の運転者が行うハンドル操作を補助する操舵補助手段と、車両が区画線から逸脱することが予想される場合に警告する警告手段と、撮像手段が撮像した画像から道路標識および道路標示の少なくとも一方を検出し、当該検出結果に基づいた情報を道路情報として算出する道路情報算出手段と、当該道路情報に基づき区画線の検出精度が低下すると予想される場合、操舵補助手段が行う補助動作および警告手段が行う警告動作を抑制する動作抑制手段とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】 センサレス制御を行う場合において、操舵フィーリングの低下を抑制する。
【解決手段】 不感帯処理部112は、誘起電圧演算部111で算出した演算誘起電圧e’を入力し、不感帯変更部113から出力される不感帯指定信号Sにしたがって、電流指令値が大きくなるにしたがって演算誘起電圧e’の不感帯を広くする。推定電気角補正部120は、電気角固着判定部119により電気角固着状態が検出されたとき、推定電気角を固着回避用加算設定角度Δθ1だけ進める。これにより、保舵時における操舵ハンドル11の振動と、切り出し時の引っ掛かり感を抑制することができる。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行っているときに、モータの脱調を良好に検出する。
【解決手段】脱調判定部117は、操舵トルクセンサ21により検出した操舵トルクTrの大きさが予め設定された設定トルクより大きく、かつ、γ軸誘起電圧演算部116で算出したγ軸誘起電圧の大きさが予め設定された設定電圧より大きいときに、モータが脱調している判定する。モータの脱調が判定されたとき、加算量ガード処理部118は、電気角加算量Δθの上限値を設定する電気角加算量ガードΔθgを徐々に低減する。これにより、推定電気角θebの進む速度が遅くなり、モータが同期する。
(もっと読む)
電動パワーステアリング装置
【課題】一のセンサ信号に基づく操舵トルクの検出時において、より安定的にアシスト力付与を継続することができる電動パワーステアリング装置を提供すること。
【解決手段】ECUは、故障が検出されていない方のセンサ素子が出力するセンサ信号(残存センサ信号)を用いたアシスト継続制御の実行時には、そのアシスト力の変化方向に関係して、周期的に瞬発的なモータトルクを操舵系に印加すべくEPSアクチュエータの作動を制御する。そして、この瞬発的なモータトルクの印加が、そのアシスト継続制御の基礎となる残存センサ信号に反映されるか否かに基づいて、当該残存センサ信号の異常を検出する。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
車両用運転支援装置
【課題】車両の前進時に、内輪差による捲き込みを回避するように運転者を十分に支援すること。
【解決手段】車両前方を撮像する撮像手段と、前記撮像手段によって撮像された画像を表示し、該表示された画像上でユーザーが車両前方の回避ポイントを設定可能な画像表示・回避ポイント設定手段と、運転者に情報提供可能な情報提供手段と、前記運転者が前記回避ポイント側に規定量のステアリング操作を行なっても前記回避ポイントを回避して走行可能なステアリング操作許容ポイントを算出し、車両が該算出したステアリング操作開始許容ポイントに至ると所定の情報提供を行なうように前記情報提供手段を制御する制御手段と、を備える車両用運転支援装置。
(もっと読む)
電動パワーステアリング装置、電動パワーステアリング装置の制御方法およびプログラム
【課題】正常な制御に基づくアシストトルクであるにも関わらず、異常が生じたと誤って認識して電動モータへ供給する電流を抑制することを防止する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータに電流を供給することにより電動モータを駆動するモータ駆動部32と、ステアリングホイールの操舵トルクと電動モータに実際に供給された実電流との関係が予め定められた関係である場合にモータ駆動部32により電動モータへ供給する電流を抑制するべくモータ駆動部32に対して出力禁止信号を出力する出力禁止判定部341と、実電流の変化に応じて予め定められた関係を設定する指標設定部342とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、モータ制御信号出力手段として、独立した二つのマイコン17a,17bを備えるとともに、該各マイコン17a,17bは、同一の電流フィードバック演算を実行する。そして、駆動回路18を構成する各スイッチングアーム20a,20bは、その対応するマイコン17a,17bが出力するモータ制御信号に基づいて、それぞれが独立して作動する。また、各マイコン17a,17bは、電流指令値と実電流I(I1、I2)との電流偏差(の絶対値)が所定の閾値を超えるか否かを判定する。そして、その電流偏差が閾値を超える場合には、システムに何らかの異常が発生したものと判定する。
(もっと読む)
駐車支援装置
【課題】駐車場所の幅に応じた駐車が可能で安価な駐車支援装置を提供する。
【解決手段】車両の操舵輪3を操舵する操舵手段を備え、車両の駐車場所への駐車を支援する駐車支援装置において、駐車場所に対して所定間隔を空けて車両を走行させる際に駐車場所の幅Lを計測する計測手段を設け、計測された幅Lに基づいて左最大舵角θLと右最大舵角θRとを求め、当該左最大舵角と右最大舵角と予め決められた走行距離および走行方向でなる走行パターンに基づいて操舵輪の目標舵角を求め、目標舵角に基づいて舵角を制御する。
(もっと読む)
摩擦状態推定装置
【課題】 直進走行時や急旋回走行時等における誤推定を抑制した摩擦状態推定装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS21で実ヨーレイトγrが所定の直進判定閾値γthより小さいか否かを判定し、この判定がYesであればステップS22で直進走行フラグFsrを1とする。ATTS−ECU16は、ステップS31で直進走行フラグFsrが1であるか否かを判定し、この判定がYesであればステップS32で路面μの初期値μintを今回値μnとして出力する。初期値μintは、標準タイヤを装着した車両が標準路面(乾燥アスファルト路面等)を走行する際の路面μであり、例えば「0.7」程度に設定されている。
(もっと読む)
モータ制御装置
【課題】モータの安定したフェイルセーフを実現するモータ制御装置を提供する。
【解決手段】イグニッションOFFとなったとき、操舵補助力制御を中止し、電動モータ12の温度tが所定温度t1以下となるまで、電源リレー回路30で電源を自己保持して電動モータ12の温度推定処理を継続する。そして、この電源自己保持中の温度推定処理が正常終了したか否かを記憶しておき、当該温度推定処理が正常に終了しなかった場合には、次回のイグニッションON時の操舵補助力制御の制御量を所定期間制限する。
(もっと読む)
電動パワーステアリング装置
【課題】アシスト電流指令値を最大電流より小さく制限することにより安全性を高めると共に、簡単な構成で処理負荷的に有利であり、出力過多異常の誤判定を生じない高機能な電動パワーステアリング装置を提供する。
【解決手段】マイクロコンピュータと、マイクロコンピュータ内のROMに格納されたプログラム、パラメータ等に基づいて制御演算処理するCPUと、記憶領域を形成するRAMとを備え、CPUはROM及びRAMと協働して、少なくとも操舵トルクに基づいて車両の操舵系に操舵補助力を付与するモータのアシスト電流指令値を演算し、アシスト電流指令値に基づいてアシスト制御する電動パワーステアリング装置であり、アシスト電流指令値の演算経路にリミッタを介すると共に、マイクロコンピュータの異常を診断する異常診断機能を具備している。
(もっと読む)
電動パワーステアリング装置
【課題】 3相モータの1相が通電不良となり2相通電駆動する場合に、逆アシスト異常の誤判定を抑制する。
【解決手段】 電動モータ20への通電不良が1相だけ発生しているときに、電動モータ20の電気角の変化に対して変動しないトルクを発生するための2相通電用電流演算式と、電動モータ20の上限電流を規定する最大電流と、指令電流の位相を進める進角量とから、2相通電用の指令電流を演算し、この指令電流により電動モータ20を2相通電制御する。このとき、指令電流と実電流との符号の不一致により逆アシスト異常を判定するが、指令電流の符号が反転する電気角近傍領域においては、逆アシスト異常の判定を行わないようにする。
(もっと読む)
1 - 20 / 90
[ Back to top ]