
Fターム[3D232CC46]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661) | 急変化防止 (101)
Fターム[3D232CC46]に分類される特許
1 - 20 / 101
電動パワーステアリング装置
【課題】車輪回転速度が設計的に持つ誤差に起因するセルフアライニングトルクの誤推定による制御異常出力を防止することができる電動パワーステアリング装置を提供する。
【解決手段】操舵トルク検出手段で検出した操舵トルクに基づいて第1のトルク指令値を演算する第1のトルク指令値演算手段31と、車輪回転速度に基づいて第2のトルク指令値を演算する第2のトルク指令値演算手段32と、操舵トルクの異常を検出したときに、第1のトルク指令値に代えて第2のトルク指令値をモータ制御手段に出力する異常時切換手段34と備えている。第2のトルク指令値演算手段32は、車輪回転速度に基づいて推定したセルフアライニングトルク推定値に不感帯を設定し、不感帯反映後のセルフアライニングトルクに基づいて第2のトルク指令値を演算する。
(もっと読む)
電動パワーステアリング装置

【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
電気式パワーステアリング装置
【課題】車両のキーOFF操作直後に発生し得るキックバックを防止するEPS装置の提供。
【解決手段】メイン回路22と、EPSモータ駆動回路21と、EPSコントローラ20とを含み、EPSコントローラは、バッテリの一端と、キースイッチを介して接続されている他、キースイッチが介挿されないEPSコントローラ給電線23によって接続されており、メイン回路は、油圧モータ及び走行モータの各駆動回路と、これらに並列に接続された平滑コンデンサと、バッテリの一端又は他端と平滑コンデンサとの間に介挿され、キーON/OFFに連動してON/OFFするコンタクタMCとからなり、キーOFFが検出された際、EPSコントローラ給電線を通じてEPSコントローラへの給電が継続されると共に平滑コンデンサの残留電荷を電源としてEPSモータが駆動されることで、キーOFF後もEPS制御を所定期間継続させ得るものとする。
(もっと読む)
ステアバイワイヤシステム
【課題】車両走行中はステアリングホイールの操作角と操舵輪の操舵角とを整合させず、停車中にステアリングホイールの操作角と操舵輪の操舵角とを整合させる。
【解決手段】ステアリングホイールと操舵輪とが機械的に切り離され、ステアリングホイールの操作角を検出する操作角検出手段と、操舵輪の操舵角を検出する操舵角検出手段とを備え、ステアバイワイヤシステム起動時、操作角検出手段により検出された操作角と操舵角検出手段により検出された操舵角とにずれが生じている場合、操作角と操舵角とを整合させる制御手段を備えるステアバイワイヤシステムにおいて、車両速度を検出する車速検出手段を備え、制御手段は、ステアバイワイヤシステム起動後、前記車速検出手段により検出された車両速度が略0になった時に、操作角と操舵角とを整合させる。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良相発生における、特に高速走行中でのトルクリップルの影響を抑制し、微妙なハンドル操舵を容易にすることのできる電動パワーステアリング装置を提供する。
【解決手段】CPU17は、モータ12の何れかの相に通電不良が発生した場合に該異常の発生を検出可能な異常判定部31を備え、該異常が検出された場合には、当該通電不良発生相以外の二相を通電相としてモータ制御信号の生成を実行する。そして、このとき、CPU17は、当該通電不良発生相に応じた所定の回転角を除いて、q軸電流指令値Iq*に対応したq軸電流値Iqが発生するようにd軸電流指令値Id*を演算する。そして、EPSECU11から、CAN通信20を通じてエンジンECU19に、車速制限要求信号Vrsを出力する。エンジンECU19は受取った車速制限要求信号Vrsが「1」の場合、エンジン回転数制御を行い、車速を所定車速V0以下にする。
(もっと読む)
アイドルストップ制御装置
【課題】所定速度以上の操舵速度でステアリングを操舵すると、所定期間中、操舵力のアシスト力を確保するアイドルストップ制御装置を提供する。
【解決手段】アイドルストップ制御装置は、ステアリングの操舵速度が所定速度以上の場合(S210:Yes)、アイドルストップの禁止条件が成立していると判断し、カウンタCT1をクリアする(S220)。アイドルストップ制御装置は、アイドルストップ中であれば(S230:Yes)、エンジンの再始動を指令し(S240)、フラグF1を1にしてアイドルストップを禁止する。操舵速度が所定速度以上になってから(S210:Yes)、所定速度未満になると(S210:No)、アイドルストップ制御装置は、加算中のカウンタCT1がCT1≦N1の場合(S260:Yes)、アイドルストップを禁止し、CT1>N1になると(S260:No)、フラグF1を0にしてアイドルストップを許可する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングモードをスムーズに切替えることができ、且つ、CPUの演算処理の負荷を軽減できる電動パワーステアリング装置を提供することにある。
【解決手段】
ステアリングにかかる操舵トルクを検出する操舵トルク検出手段と、車速を検出する車速検出手段と、ハンドルの操舵をアシストするアシスト力を発生するモータと、操舵トルク及び車速に基づいてモータを制御するモータ制御手段とを備えた電動パワーステアリング装置において、モータ制御手段が、ステアリングモード切替信号が入力されたときに、各ステアリングモードの代替車速と車速との対応関係を示す擬似車速パラメータを用いて車速を代替車速に変換する車速切替手段を備え、変換された代替車速に基づいてアシスト制御を行う。
(もっと読む)
車両運動制御装置
【課題】横転限界舵角をより正確に演算し、車両状態に応じた操舵制御が行えるようにする。
【解決手段】車両重量Mや重心高Hおよび車速Vに基づいて随時に横転限界舵角Strlimを演算する。これにより、車両状態に応じた正確な横転限界舵角Strlimを演算することが可能となる。また、横転限界舵角Strlimに対応する舵角反力特性を求めておき、ドライバがステアリング操作して舵角Strが発生したときに、その舵角Strに対応する舵角反力を発生させることで、より早くから横転限界舵角Strlimに至らないように舵角Strを抑制する。横転が発生する直前の舵角Strである横転限界舵角Strlimを車両重量Mや重心高Hおよび車速Vに応じた値として演算しているため、車両状態に応じた操舵制御を行うことが可能になる。
(もっと読む)
電動パワーステアリング装置
【課題】操舵補助力に関して、運転者の意図に反応する電動パワーステアリング装置を提供する。
【解決手段】本発明の電動パワーステアリング装置は、アクセル開度の変化率、ブレーキ圧の変化率、及び、横加速度等の、車両の運転状況に関する複数のデータを取得するデータ取得部11mと、複数のデータをそれぞれ正規化してそれらの中から現在の最大値を求め、当該最大値を運転者の意図として判定する意図判定部11nと、操舵補助力を生じさせるにあたって、意図判定部11nによる判定結果に応じてアシスト特性を変更する制御部11kとを備えたものである。そして、意図判定部11nにより、運転者がどのような運転をしようとしているかについての意図を判定し、その判定結果に応じてアシスト特性を変更するので、運転者の意図に沿うように反応する操舵補助を行うことができる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動パワーステアリング装置の稼動及び制御において、低電源電圧環境の中で、操舵補助が異常停止する場合においても、ドライバーに違和感を与えないで、自然に操舵アシストを停止することができる。
【解決手段】電源電圧の低下時に、モータ駆動回路の故障により操舵アシストの停止が生じても、モータ端子間をリレーにより短絡して、モータによる電磁ブレーキを発生させることで、アシスト停止時のキックバックを緩和することができる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】故障誤判定を抑制することにより当該故障検出に対する信頼性を高めつつ故障電流に対する保護機能の向上が図られる電動パワーステアリング装置の制御装置を提供する
【解決手段】FETの駆動が制限された状態で故障検出条件が非成立である旨判定される場合(ステップS202でNO)には、モータの端子電圧に基づき設定される制限解除条件が成立する旨判定されるとき(ステップS209でYES)にのみ、FETの駆動制限が解除される。このため、FETの駆動が制限された状態で故障検出条件が非成立である旨判定される場合に、当該制限が即時に解除されることはない。したがって、故障誤判定が抑制されることにより、当該故障検出に対する信頼性を高めつつ故障電流に対する保護機能の向上が図られる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。予兆検出部41は、予兆検出処理を実行することにより、制御破綻の予兆を検出する。制御態様変更部42は、予兆検出部41によって予兆が検出されたときに、制御態様変更処理を行なうことにより、制御破綻の予兆の発生を運転者に警告する。
(もっと読む)
車両用操舵制御装置、および操舵制御装置付き車両
【課題】 ドライバへ違和感をあたえることを防止することができる車両用操舵装置を提供すること。
【解決手段】 ハンドルの操舵角と前輪の転舵角との比である舵角比を変更する舵角比可変手段を駆動する転舵アクチュエータの負荷が予め定められた所定のしきい値よりも高いときには、運転者の操舵トルクをアシスト(補助)するアシストトルクを大きくするようにした。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
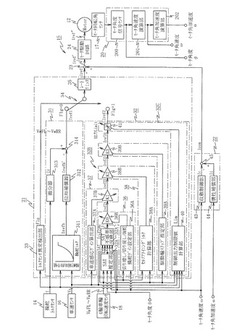
モータ制御装置および電動パワーステアリング装置
【課題】利用者が異常を認識しやすいモータ制御装置を提供する。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id*、iq*とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧Vu 、Vv 、Vw に変換する。異常監視部27は、電流センサ14が正常に動作しているか否かを判断する。3相電圧補正部24は、正常時にはトルクリップルが小さくなるように、異常時には安全性を損なわない程度にトルクリップルが大きくなるように3相の指令電圧を補正する。これにより、異常の発生を利用者に認識させることができる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】製造に必要な部品やコストの増大を抑えつつ電源投入時の突入電流を低減することができるモータ制御装置を提供する。
【解決手段】故障発生時等にバッテリ8から過大な電流が流れるのを防止するために設けられた開閉器60が第1および第2FET61,62から構成されている。第1および第2FET61,62は、それらの寄生ダイオードが互いに逆向きとなるように直列接続されている。第1および第2FET61,62のオン・オフを制御するために両FET61,62のゲート端子に開閉制御信号Sswが与えられ、この開閉制御信号Sswは、電源投入時にはそのデューティ比が0から1へと漸増するように変化する。このような電原投入時において、サージ吸収用ツェナーダイオード72が還流ダイオードとして機能する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】モータ駆動電圧算出時のパラメータに発生するノイズを抑制し、モータをより安定的に駆動する。
【解決手段】オープンループ制御部22は、dq軸上の指令電流id*、iq*とモータの角速度ωe に基づき、モータの回路方程式に従いdq軸上の指令電圧vd 、vq を求める。dq軸/3相変換部23は、指令電圧vd 、vq を3相の指令電圧に変換する。R算出部26は、q軸指令電圧vq と電流センサ14で検出した電流値ia と角速度ωe に基づき、モータの回路方程式に含まれる電機子巻線抵抗を含む回路抵抗Rを求める。R平滑部27はR算出部26で求めたR値に対して平滑化処理を行い、オープンループ制御部22は指令電圧vd 、vq を求めるときに平滑化されたR値を使用する。モータの回路方程式に含まれる電機子巻線鎖交磁束数Φを求めるときにも、同様の平滑化処理を行う。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】ブラシレスモータのロータ回転速度が急激に変化する場合でも、逆方向へトルクが発生することのないよう制御する。
【解決手段】ロータ角度位置検出部162は、ロータの電気角を所定の検出電気角である60度毎に検出可能なホールセンサ5からの検出信号を受け取り離散的に検出ロータ角θrを出力する。ロータ角度推定部162は、検出ロータ角θrに基づき電気角推定値θreを算出する。このとき検出ロータ角θrに対して電気位相角だけずれた電気角から、さらに回転方向へ60度だけ回転した電気角までの範囲内に、回転磁界方向を示す電気角が制限されるような制限値を設け、電気角推定値θreがこの制限値を超えないようにする。そうすれば推定ロータ角度θreに基づき発生される回転磁界の電気角が現実のロータ7の磁界の電気角より進むことがないので、逆方向へのトルクの発生を防止できる。
(もっと読む)
車両挙動制御装置
【課題】操舵伝達特性可変設定装置を組み込まれた電動式パワーステアリング装置付き操舵装置を有する車両において、電動式パワーステアリング装置が失陥し、セルフステアが生じた場合に、対策装置を冗長なものにすることなく、運転者のステアリング操作に違和感を与えないようにすること。
【解決手段】故障判定部108によって電動式パワーステアリング装置の失陥が検出され、且つセルフステア検出部112によってセルフステアが検出された場合には、VGS用モータ58によって電動式パワーステアリング装置の失陥によるセルフステアを打つ消す方向の操舵を行う。
(もっと読む)
車両挙動制御装置
【課題】 挙動制御に時間遅れを生じさせることなく、センサの故障等に起因する目標制御量の急変を抑制した車両挙動制御装置を提供する。
【解決手段】 ステップS22の判定がNoであった場合、ATTS−ECU16は、ステップS25で駆動力配分ベース量Dbが正の値であるか否かを判定し、この判定がYesであればステップS26で1周期前のストア量[D]にレート判定閾値Rthを加えたものを目標駆動力配分制御量Dtgtとし、NoであればステップS27で1周期前のストア量[D]からレート判定閾値Rthを減じたものを目標駆動力配分制御量Dtgtとした後、ステップS24で目標駆動力配分制御量Dtgtをストア量[D]として記憶してスタートに戻る。
(もっと読む)
1 - 20 / 101
[ Back to top ]