
Fターム[3D232DA02]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | 前輪舵角 (3,968)
Fターム[3D232DA02]の下位に属するFターム
Fターム[3D232DA02]に分類される特許
21 - 40 / 61
車両制御装置
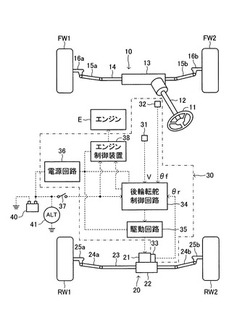
【課題】電力が確保されている状態であるエンジン停止前までに左右車輪についての中立復帰を行う車両制御装置を提供する。
【解決手段】車両制御装置は、左右後輪RW1、RW2を転舵するための電動モータ21を備えている。電動モータ21は、後輪転舵制御回路34により制御され、左右後輪RW1、RW2を目標舵角に転舵する。後輪転舵制御回路34は、イグニッションスイッチ37がオン状態からオフ状態へ切換られたことに応答して、電動モータ21を駆動して左右後輪RW1、RW2を中立位置に復帰させ、中立位置に復帰が完了した後にエンジンEを停止する。
(もっと読む)
車両用舵角検出装置及びこれを使用した電動パワーステアリング装置

【課題】システムが停止する直前の絶対舵角の有効性を判断することができる車両用舵角検出装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】システム停止直前に絶対舵角演算手段で演算した絶対舵角を不揮発性メモリ19に記憶する絶対舵角記憶手段41と、システム起動時に不揮発性メモリに記憶された絶対舵角記憶値と相対舵角とにより絶対舵角暫定値を演算する暫定値演算手段35と、絶対舵角暫定値と車両モデルの特性とに基づいてセルフアライニングトルク基準値を演算するセルフアライニングトルク演算手段と、車両の実セルフアライニングトルクを検出する実セルフアライニングトルク検出手段37と、セルフアライニングトルク基準値と実セルフアライニングトルクとの差に基づいて前記絶対舵角暫定値が有効であるか否かを判定する有効性判定手段38とを少なくとも備えている。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪にコーナリングパワーの差が生じた場合にも安定したステアリング特性を維持する。
【解決手段】左右の後輪5l,5rに対して電動アクチュエータ11l,11rをそれぞれ有する後輪トー角可変式の自動車Vに設けられ、電動アクチュエータ11の駆動制御に供される後輪トー角制御装置10において、左右の後輪5l,5rのコーナリングパワーを検出する手段として、タイヤ空気圧判定部23およびタイヤ種類判定部24を備え、タイヤ空気圧判定部23およびタイヤ種類判定部24によって一方の後輪5にコーナリングパワーの低下が判定された場合、他方の後輪5のトー角θを、スリップ角αが大きくなる向きに補正する。
(もっと読む)
後輪操舵制御装置
【課題】 起動時等に故障誤検知をしたり、違和感を伴なう動作を行うことのないように改良された後輪操舵制御装置を提供する。
【解決手段】 アクチュエータの温度が所定値以下のときには、前記アクチュエータの駆動状態を抑制することにより、左右後輪のアクチュエータの応答に差異が生じたり、遅れが生じるのを防止し、しかも誤った故障診断を行うことを回避することができる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者のステアリング操作の意図と走行制御とを合致させる。
【解決手段】車両用走行制御装置は、操舵角θsを検出し(ステップS1)、検出し操舵角θsを基に、運転者による車両の横位置の変更の意図の有無を判定し(ステップS4)、運転者による車両の横位置の変更の意図有りと判定した場合、横位置の制御目標値を変更する(ステップS5)。
(もっと読む)
車両挙動制御装置
【課題】複数の車両運動制御装置を用いて運動を協調制御させるに際し、各車輪のタイヤの荷重状態に応じて適切に所望の運動を実現させるタイヤ発生力を算出して無駄なエネルギ消費を抑える。
【解決手段】車輪3のタイヤ横力Fyおよびタイヤ前後力Fxを個別に可変制御することによって車両の挙動を制御する車両挙動制御装置10において、車輪のタイヤ横力とタイヤ前後力との制御割合を設定する制御割合設定部30と、運転者による運転操作量から目標ヨーレイトγTを算出する目標ヨーレイト算出部27と、車輪の実舵角から規範ヨーレイトγT0を算出する規範ヨーレイト算出部29とを備え、制御割合設定部30は、目標ヨーレイト算出部によって算出された目標ヨーレイトと規範ヨーレイト算出部によって算出された規範ヨーレイトとの差Δγが小さいほど、タイヤ前後力の制御割合を小さくするように構成する。
(もっと読む)
スーパーインポーズド・ステアリングの作動方法
本発明はスーパーインポーズド・ステアリングシステム(10)の作動方法、スーパーインポーズド・ステアリングシステム(22)、コンピュータプログラム及びコンピュータプログラム製品に関する。本方法においてはステアリングギヤレシオが走行速度に応じて生じ、その際時間的遅れの度合いは走行速度に応じて調整される。  (もっと読む)
(もっと読む)
自動車の垂直慣性モーメント及びコーナリング剛性を同定する方法
本発明は、少なくとも2つの操舵輪を備える自動車の垂直慣性モーメント、及び前輪及び後輪のコーナリング剛性を同定する方法に関するものである。この方法は、前記車両のヨーレート及び横加速度を測定するステップ(12,14)と、そして前記慣性モーメント及び前記剛性を前記車両の所定タイプのパラメトリックモデルのパラメータとして、前記ヨーレートの測定値及び前記横加速度の測定値に基づいて同時に同定するステップ(16,18,20)を含む。  (もっと読む)
(もっと読む)
操舵装置
【課題】操舵操作性に優れた操舵装置を提供すること
【解決手段】運転者が操舵操作を行う際に操作面10s上で移動させる操作部材12及び当該操作部材12の移動量を操舵操作量(操舵角θST)として検出する操舵操作量検出手段14が設けられた操舵入力手段10と、操舵操作量検出手段14により検出された操舵操作量に基づいて操舵輪WL,WRの目標転舵角θreqを設定する目標転舵角設定手段(電子制御装置30)と、操舵入力手段10との機械的な連結無しに目標転舵角θreqとなるよう操舵輪を転舵させる車輪転舵角付与手段20と、を備えること。
(もっと読む)
操舵装置
【課題】操舵操作性に優れた操舵装置を提供すること
【解決手段】運転者が操舵操作を行う際に操作面10s上で移動させる操作部材12及び当該操作部材12の移動量を操舵操作量(操舵角θST)として検出する操舵操作量検出手段14が設けられた操舵入力手段10と、操舵操作量検出手段14により検出された操舵操作量に基づいて操舵輪WL,WRの目標転舵角θreqを設定する目標転舵角設定手段(電子制御装置30)と、操舵入力手段10との機械的な連結無しに目標転舵角θreqとなるよう操舵輪を転舵させる車輪転舵角付与手段20と、操舵入力手段10を振動させることによって操舵輪WL,WRの転舵動作に伴う操舵反力の存在を運転者に伝える操舵反力伝達手段40と、を備えること。
(もっと読む)
車両用舵角制御装置、自動車、及び車両用舵角制御方法
【課題】制御対象である車輪の舵角をより適切に中立位置に復帰させること。
【解決手段】舵角付与機構2に不具合が生じた場合に、舵角付与機構2によって後輪10の舵角が中立位置から遠ざかる方向に変化されるときには当該舵角付与機構2を動作不可能なロック状態とし、舵角付与機構2によって後輪10の舵角が中立位置に近づく方向に変化されるときには当該舵角付与機構2のロック状態が解除された非ロック状態とするようにしたため、舵角付与機構2によって舵角が中立位置に近づく方向への変化のみが許容されるので、制御対象である後輪10の舵角がより適切に中立位置に復帰される。
(もっと読む)
車両の統合制御装置
【課題】車両の運動状態を的確に検出し、自動操舵制御装置とサスペンション制御装置とを適切に協調して作動させ、車両の運動性能や乗心地を良好に保つ。
【解決手段】操舵制御部20は、自動操舵制御によるステアリングギヤ比の設定がクイック傾向の場合、或いは、舵角補正量がドライバの操舵量を増大させる(切り足す)方向に制御する場合にセットされる判定フラグFSLをサス_ECU40に出力する。サス_ECU40は、基本的に悪路走行においては低減衰側の特性に設定し、通常路走行においては高減衰側の特性に設定して各ショックアブソーバ32fl,32fr,32rl,32rrの減衰力特性を制御するようになっているが、判定フラグFSLがセットされている場合は、減衰力特性を高減衰側の特性に設定して制御する。
(もっと読む)
操舵装置
【課題】車両のヨー方向の減衰特性を変化させて、車両の収斂性を向上することができる操舵装置を提供すること。
【解決手段】前後輪操舵車1の旋回中における前後輪操舵車1の旋回中心位置を車両前後方向に移動させる前輪操舵装置21および後輪操舵装置22と、前後輪操舵車1の旋回中における操舵状態が切り込み状態か切り戻し状態かを判断する操舵状態判断部とを備える操舵装置2であって、前輪操舵装置21および後輪操舵装置22は、操舵状態判断部により、切り戻し状態であると判断されると、切り込み状態であると判断されるよりも、旋回中心位置を車両前後方向において後方に移動させる。これにより、前後輪操舵車1のヨー方向における減衰特性が向上し、この前後輪操舵車1の収斂性が向上する。
(もっと読む)
操舵装置
【課題】車両の旋回中における運転者の違和感を抑制することができる操舵装置を提供すること。
【解決手段】操舵装置2は、車両の旋回中におけるこの車両の旋回位置を車両前後方向に移動させることができる前後輪操舵車1の操舵を行うものである。この操舵装置2の前輪操舵装置21は、算出された旋回中心位置が車両前後方向において前方に位置する場合(前輪操舵装置21の減衰力が減少する場合)は、後方に位置する場合(前輪操舵装置21の減衰力が増加する場合)よりも、ステアリング減衰力である減衰力用アシスト力を増加して発生させる。これにより、前後輪操舵車1の旋回中における運転者の違和感を抑制することができる。
(もっと読む)
ステアバイワイヤシステム
【課題】転舵モータ制御装置に異常が生じた場合においても、転舵モータに対して常時必要かつ十分な電力を供給する手段を提供すること。
【解決手段】ベース43bは円筒形をしており、その軸は上記のz軸に一致している。U,V,Wの各相に接続された各分配子(39U,39V,39W)はそれぞれ、z軸周りに、40°×m回転に対する回転対称形を構成する様に同心円状に配置されている。各分配子の間に設けられたスリットSのスリット幅は、それぞれ何れもz軸に近づくにつれて広がっている。平面α上における各分配子の平面形状が等脚台形になっているが、各分配子間のスリット幅がz軸からの距離rに対して単調減少するような設定になっていれば、各分配子の平面形状は任意で良い。ガイドBG1,BG2は、内部空間36Rの側壁面上に固定されていて、各摺動子41,42をそれぞれ動径方向に案内する。
(もっと読む)
車両用ステアリングシステム
【課題】実用性の高い独立操作型のステアリングシステムを提供する。
【解決手段】互いに独立して操作可能とされる1対の操作部材14を備え、それら1対の操作部材14の各々の操作量に応じた車輪の転舵量となるように転舵装置が制御されるとともに、それら1対の操作部材14に対して設定された軌道に沿った方向の力である軌道方向力を付与すべく軌道方向力付与装置70が制御されるステアリングシステムであって、軌道方向力付与装置70に、1対の操作部材14の一方の操作量とそれらの他方の操作量との比である操作量比を設定操作量比とするための成分である設定比実現成分Fpを含む軌道方向力を発揮させることを特徴とする。本発明のステアリングシステムによれば、1対の操作部材14の各々を、あたかも機械的に連動しているかのように動作させることが可能となり、運転者に適切な操作感を与えることが可能となる。
(もっと読む)
車両の操舵制御装置及び操舵装置
【課題】車両の構造の制約を受けずに所望の操舵性を得る。
【解決手段】本発明の操舵装置によれば、左右前輪を支持する車体3の上下動に伴うステアリングリンク5L,5Rの横方向の長さの変化量を打ち消す方向にEPSモータ13L,13Rの制御量が補正される。このため、バンプステアが発生したとしても、左右前輪の切れ角がその影響で変化してしまうのが防止又は抑制される。また、車輪の切れ角を直接補正するため、車両の構造の制約を受けずに所望の操舵性が得られる。
(もっと読む)
移動量演算装置
【課題】カメラが自動車等の移動体に搭載されて自在に移動する場合に於いて、その移動量もしくは移動距離を、比較的小さな処理負荷で算出できるようにする。
【解決手段】カメラで撮像したフレームから所定形状のマッチング検査領域を切り出してフレーム間でパターンマッチングを行い、同一の特徴点に対応する被写点の位置をフレーム毎に算出し、算出した両被写点位置間の変位量を求めて両フレーム間での移動量とする移動量演算装置。カメラが搭載される移動体の舵角を検出する(S02)手段を有し、マッチング検査領域を切り出す手段は第1フレームに続く第2フレームのマッチング検査領域を前記検出した舵角に応じて第1フレームのマッチング検査領域に対して傾斜させて切り出し(S03)、両被写点位置間の変位量を求める手段は当該求めた変位量を前記移動体の移動量とする(S09)。
(もっと読む)
車両用操舵装置
【課題】 操作素子の操作で転舵用タイヤを左または右に転舵させたときに操作素子を戻さなくても転舵用タイヤを中立位置に戻すことができ、操舵操作を簡単に行うことができる車両用操舵装置を提供する。
【解決手段】 この車両用操舵装置10は、運転者の操舵操作に応じて操作量を発生する操作素子11と、操作素子11の操作量を検出する操作量検出部13と、タイヤ19の向きを変更する舵角発生部17等と、操作素子の操作量に応じて舵角発生部17等を駆動する制御装置20とを備え、さらにリセット信号発生部42を有し、かつ制御装置は、リセット信号発生部からのリセット信号を入力した時、このリセット信号に基づきタイヤの向きが中立位置になるように舵角発生部等の駆動を制御するタイヤ中立位置設定手段(選択部41と偏差演算部44等)を備える。
(もっと読む)
駐車位置調整システム
【課題】 安全性の確保された駐車位置調整システムを提供すること。
【解決手段】 車両運動制御装置100は、車両の駐車位置が調整される際、車室外において操作する遠隔操作装置200を用いて自らが直接、車両と障害物との隙間を目視しながら駐車位置の調整を可能にすると共に、車両が極めて低い車速域(好ましくは、1[km/h]以下の車速域)で移動するように、車両の車速を制御する。これにより、遠隔操作装置200の操作者が所望の駐車位置で車両を停止させようと判断してから実際に車両が停止するまでの間の車両の移動距離を短くすることができるため、操作者は、車両の駐車位置を簡便に微調整することができる。また、極めて低い車速域で車両が移動するため、安全性についても確保することができる。
(もっと読む)
21 - 40 / 61
[ Back to top ]